Clear Sky Science · es
Eliminación espacial de valores atípicos para la eliminación de ruido LiDAR en condiciones meteorológicas adversas
Ver con claridad bajo la lluvia y la nieve
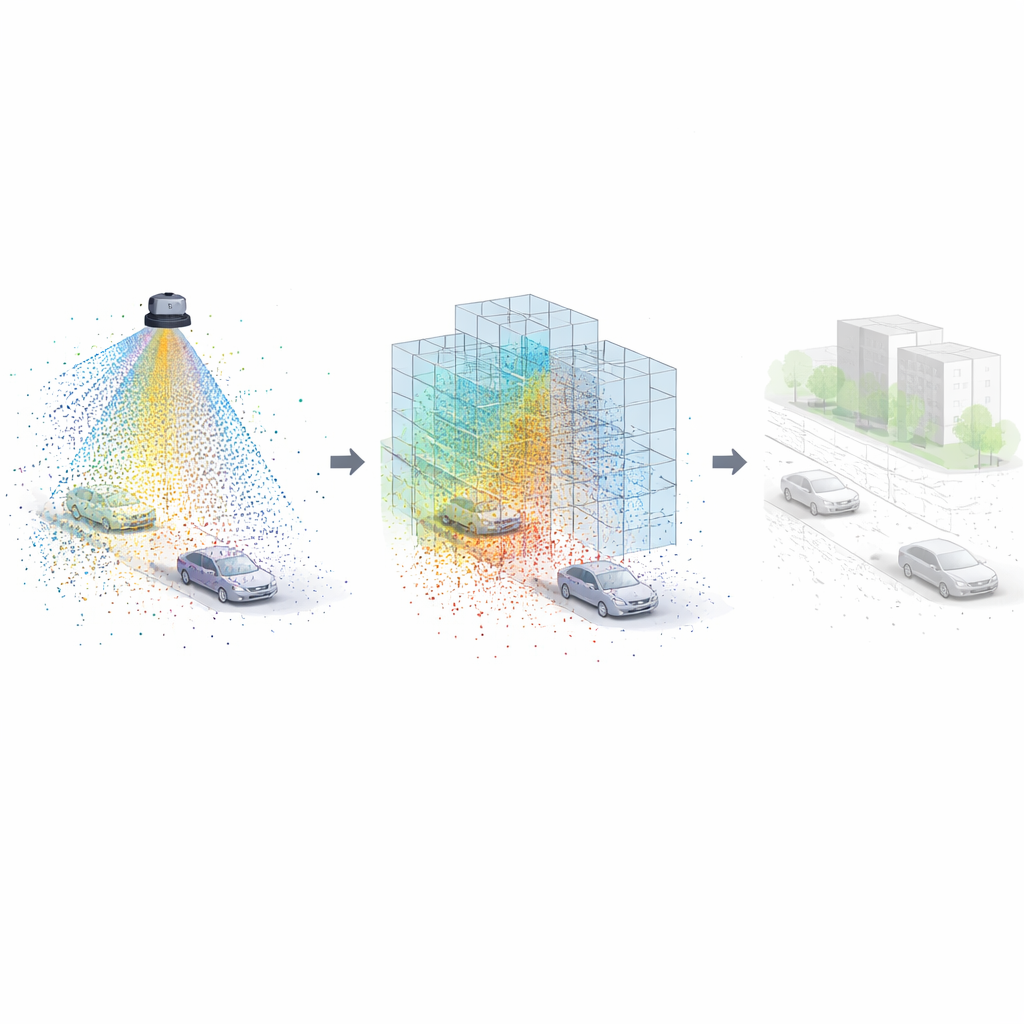
Los coches autónomos dependen de sensores basados en láser, llamados LiDAR, para construir una imagen 3D del entorno. Pero cuando el tiempo empeora —nieve, lluvia o niebla— estos sensores detectan innumerables reflexiones de gotas y copos, llenando la visual con puntos falsos. Este estudio presenta una nueva manera de limpiar rápidamente y con precisión esas escaneos LiDAR desordenados, ayudando a los vehículos autónomos a «ver» la carretera y los obstáculos reales incluso en condiciones adversas.
Por qué el mal tiempo ciega los ojos láser
El LiDAR funciona emitiendo pulsos láser y midiendo las reflexiones para crear una nube de millones de puntos 3D. En tiempo despejado, la mayoría de esos puntos provienen de objetos reales como coches, edificios y la superficie de la carretera. Sin embargo, en la nieve o la lluvia intensa, muchos puntos son causados por pequeñas partículas en suspensión en el aire. Los métodos tradicionales de limpieza analizan la distancia entre puntos o la intensidad de la reflexión. Aunque estos enfoques pueden eliminar parte del ruido, a menudo tienen dificultades para funcionar en tiempo real y o bien borran demasiados puntos reales o bien dejan demasiados falsos, sobre todo cuando el patrón de puntos cambia con la distancia y el ángulo de visión.
Dividir la vista en porciones manejables
Los autores proponen la Eliminación Espacial de Valores Atípicos (SDOR), un método que aborda la contaminación dividiendo primero el campo de visión del LiDAR en muchas pequeñas regiones, o sectores, tanto horizontal como verticalmente. En lugar de tratar la escena completa como una única nube uniforme, SDOR considera cada sector como una mini-escena independiente. Dentro de cada sector, el algoritmo examina cuántos puntos hay y qué tan dispersos están. Esta división desbloquea dos ventajas clave: cada sector puede procesarse en paralelo en procesadores multinúcleo, y el método puede adaptar su comportamiento a las condiciones locales de esa región, como si está cerca del vehículo, lejos, densa en puntos o relativamente escasa.
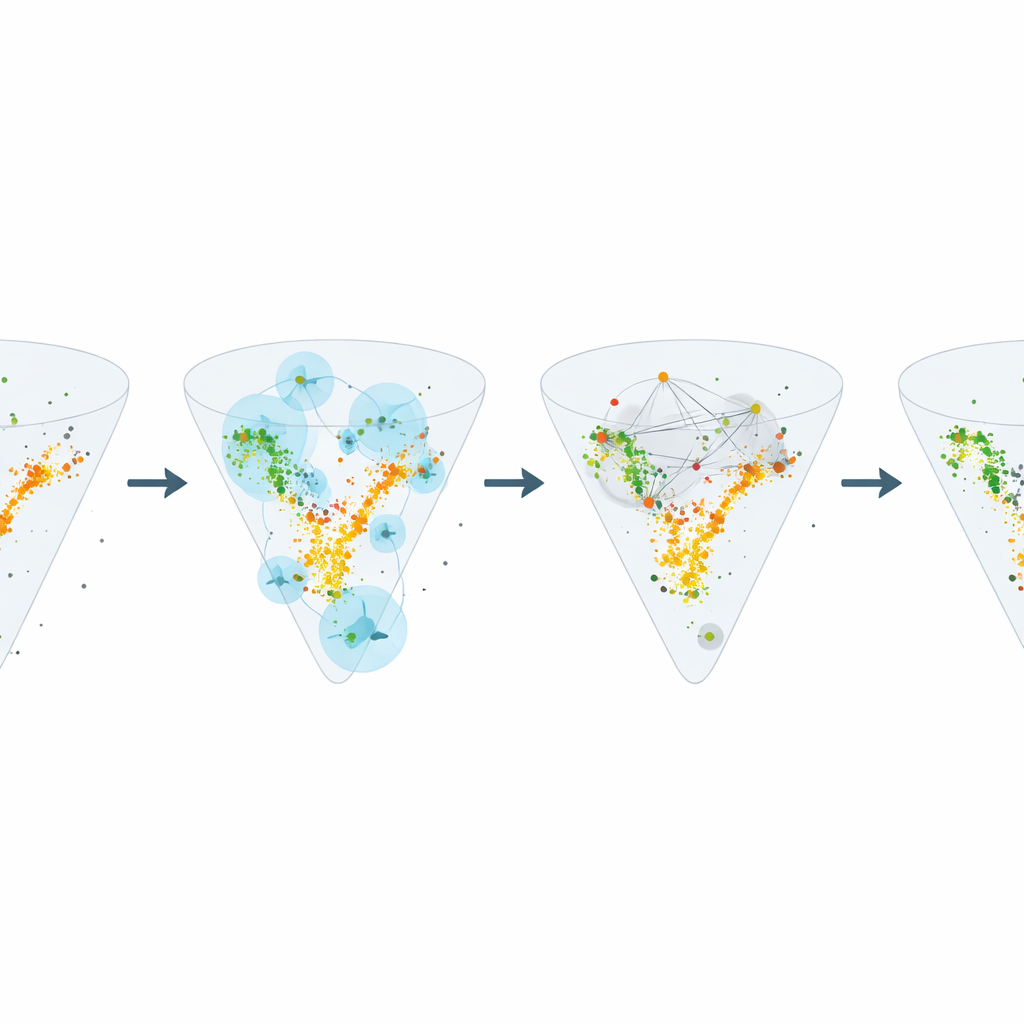
Dejar que los datos decidan qué es ruido
Una vez dividida la escena, SDOR estima qué tan concurrido está cada sector en comparación con la nube global. A continuación ajusta un radio de búsqueda —el vecindario alrededor de cada punto que se inspecciona— para que coincida tanto con la distancia al sensor como con la densidad local. Los puntos cercanos al vehículo o en regiones muy densas obtienen vecindarios más pequeños; las regiones lejanas o escasas obtienen vecindarios más grandes. Para cada punto, el algoritmo cuenta cuántos vecinos caen dentro de ese radio. Si hay muy pocos, ese punto se considera un valor atípico —probablemente un copo de nieve, una gota de lluvia o una reflexión de niebla— y se elimina. Esta estrategia consciente de la densidad evita usar una regla fija para todo y, en su lugar, permite que los datos determinen qué puntos merecen confianza y cuáles deben descartarse.
Rendimiento rápido y estable a través de muchas escenas tormentosas
Los investigadores evaluaron SDOR en dos conjuntos de datos exigentes: uno recopilado en condiciones invernales reales con puntos de nieve etiquetados, y otro que simula nieve, lluvia y niebla sobre escenas de conducción urbana. Compararon SDOR con ocho métodos existentes, incluidos filtros clásicos basados en distancia, filtros por intensidad que se apoyan en el brillo de las reflexiones y variantes dinámicas más complejas. SDOR consiguió de forma consistente altas puntuaciones al identificar correctamente el ruido meteorológico mientras preservaba los objetos reales, y lo logró con algunas de las tasas de error más bajas. Lo crucial: gracias a su diseño por sectores y en paralelo, SDOR procesó fotogramas más rápido que otros métodos basados en distancia e incluso igualó o superó en velocidad a muchos enfoques basados en intensidad, todo ello manteniéndose más preciso y más estable entre fotogramas.
Visión 3D más clara para una conducción autónoma más segura
En términos cotidianos, SDOR enseña a un coche autónomo a ignorar el «ruido» visual causado por el mal tiempo sin perder de vista lo importante —otros vehículos, peatones y la propia carretera. Al fragmentar la escena y ajustar sus reglas a las condiciones locales de cada porción, el método ofrece vistas 3D limpias y fiables lo suficientemente rápidas para la conducción en tiempo real. Esto hace de SDOR un componente prometedor para vehículos autónomos más seguros que puedan mantener una percepción fiable incluso cuando el tiempo está lejos de ser perfecto.
Cita: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Palabras clave: Eliminación de ruido LiDAR, conducción autónoma, condiciones meteorológicas adversas, filtrado de nubes de puntos, percepción por sensores