Clear Sky Science · ja
悪天候下でのLiDARノイズ除去のための空間分割外れ値除去
雨や雪の中でも視界をクリアに保つ
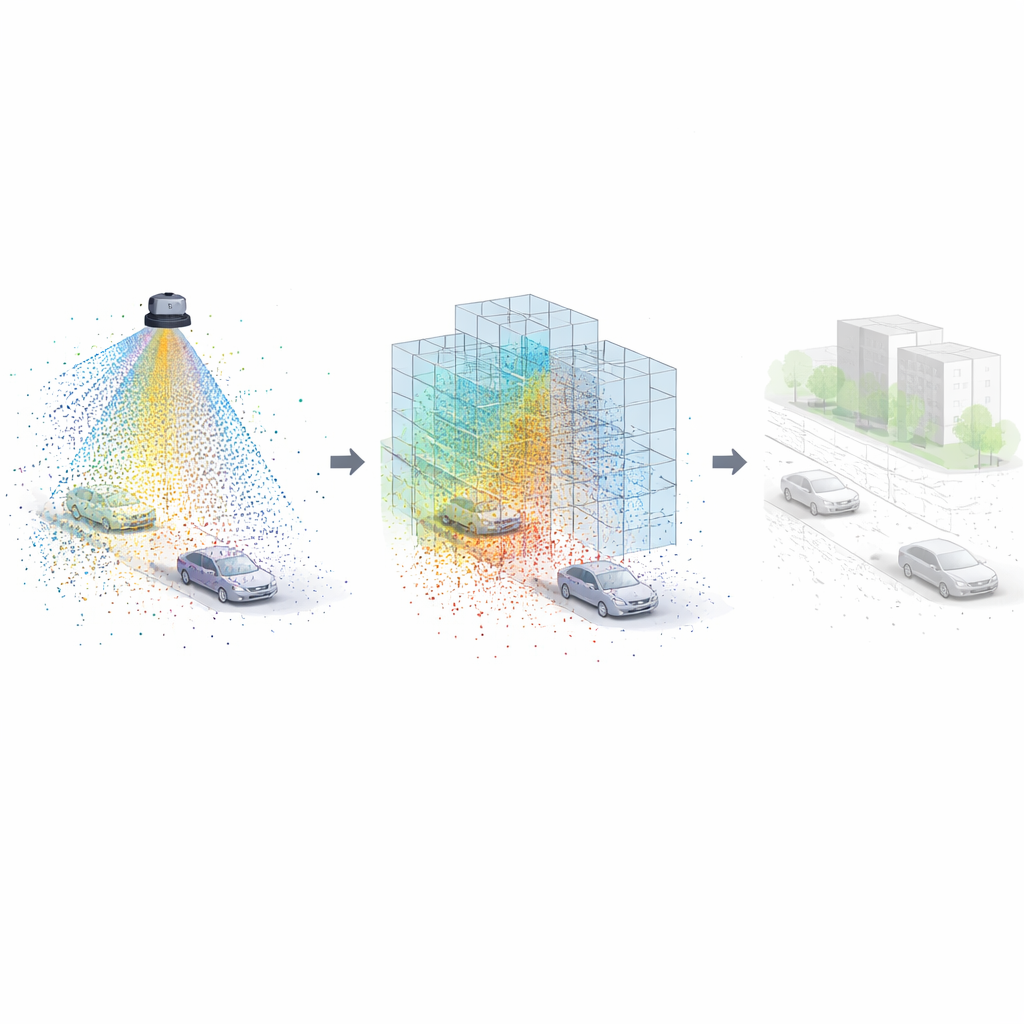
自動運転車はLiDARと呼ばれるレーザー式センサーで世界の3次元像を生成します。しかし天候が荒れると—雪、雨、霧—これらのセンサーは水滴や雪片からの多数の反射を拾い、誤った点で視界が散らかります。本研究は、そうしたノイズの多いLiDARスキャンを素早く正確にクリーンアップする新しい手法を紹介し、厳しい条件下でも自動運転車が道路や実際の障害物を“見る”のに有用な改善をもたらします。
なぜ悪天候がレーザーの視界を遮るのか
LiDARはレーザーパルスを発射し反射を測定して数百万の3次元点の雲を作ります。晴天時にはそれらの点の多くが車、建物、路面など実際の物体から来ます。しかし雪や豪雨時には、多くの点が空中を漂う微小粒子によって生じます。従来の除去法は点同士の距離や反射強度に注目します。これらの方法はある程度のノイズを除去できますが、リアルタイム対応や距離や視角に応じて点の分布が変化する場面では苦戦し、実点を消しすぎたり偽点を残したりしがちです。
視野を扱いやすい断片に分ける
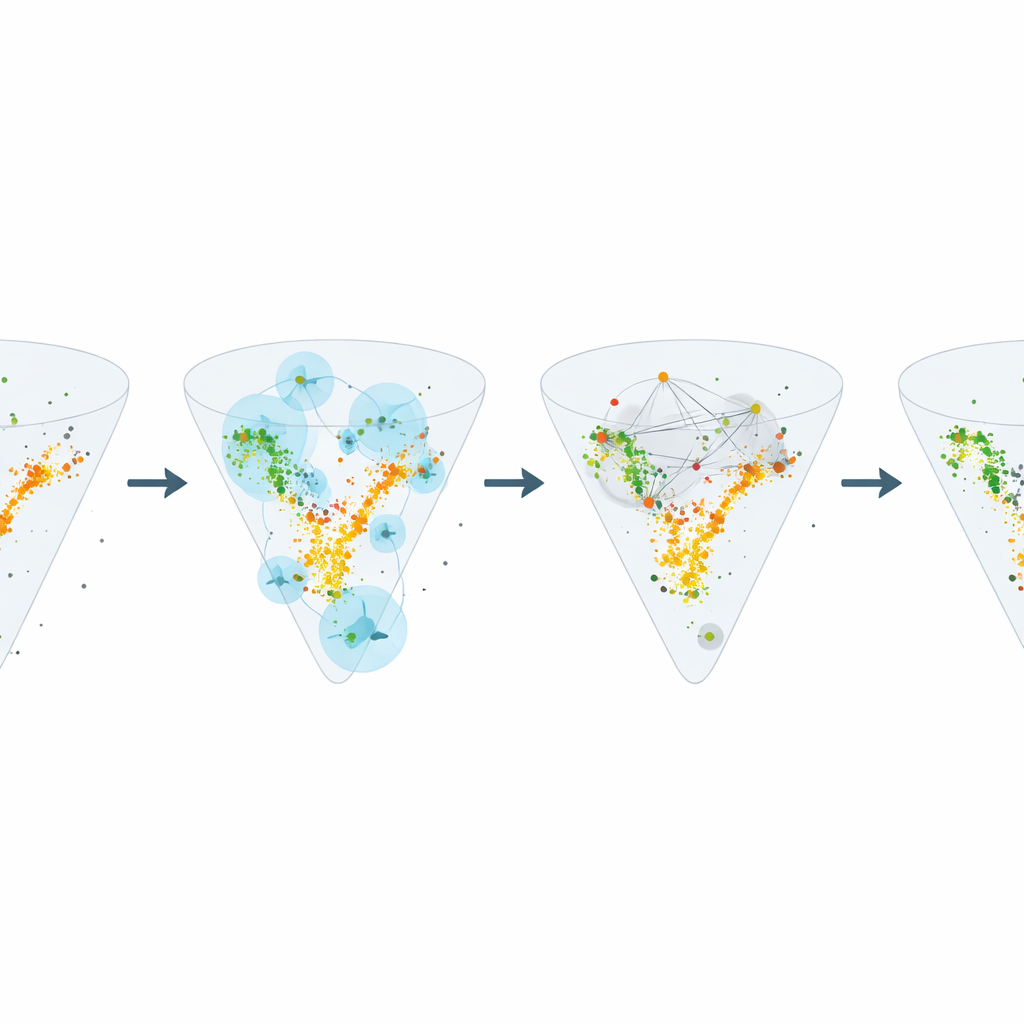
提案手法のSpatially Divided Outlier Removal(SDOR)は、まずLiDARの視野を水平方向と垂直方向に多くの小領域(セクタ)に分割することで雑音に対処します。シーン全体を一つの大きな均一な点群として扱う代わりに、SDORは各セクタを独立したミニシーンとして処理します。各セクタ内でアルゴリズムは点の数や広がりを調べます。この分割により二つの主要な利点が得られます:各セクタをマルチコアプロセッサで並列に処理できること、そしてその領域が車に近いか遠いか、点密度が高いか低いかなど局所的条件に応じて挙動を適応できることです。
データに基づいて何をノイズとみなすか決める
シーンを分割した後、SDORは各セクタが全体の点群と比べてどれほど混雑しているかを推定します。次に、センサーからの距離と局所密度に合わせて探索半径(各点の周辺を検査する範囲)を調整します。車に近いか密集した領域では小さな近傍を使用し、遠方や希薄な領域では大きな近傍を取ります。各点についてその半径内に何個の近傍点があるかを数え、規定より少なければその点を外れ値—おそらく雪片、雨滴、霧の反射—として除去します。この密度対応の戦略により、どこでも一律のルールを使うのではなく、データ自身がどの点を信頼しどの点を捨てるかを決めます。
多くの荒天シーンで速く安定した性能
研究者たちは、雪点がラベリングされた実際の冬季データセットと、都市走行シーンに雪・雨・霧をシミュレートした別の要求の厳しいデータセットでSDORを評価しました。彼らは古典的な距離ベースのフィルタ、反射強度に基づくフィルタ、より複雑な動的変法など8つの既存手法と比較しました。SDORは天候ノイズの正確な識別と実際の物体の保持の両面で一貫して高いスコアを達成し、誤検出率も低い結果を示しました。重要なのは、セクタ単位の並列設計のおかげで、SDORは距離ベースの多くの手法よりフレーム処理が速く、スピードでは反射強度ベースの手法と競合または上回ることもあり、同時にフレーム間でより正確かつ安定している点です。
より安全な自動運転のための鮮明な3D視界
日常的に言えば、SDORは悪天候による視覚的“ノイズ”を無視しつつ、他の車両、歩行者、路面といった重要なものを見失わないよう自動運転車を教える方法です。シーンを断片化し各断片の局所条件にルールを適応させることで、本手法はリアルタイム走行に十分な速度でクリーンかつ信頼できる3Dビューを提供します。これにより、SDORは天候が完璧でない場合でも信頼できる知覚を維持できる自動運転車の安全性向上に有望な基盤となります。
引用: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
キーワード: LiDARデノイジング, 自動運転, 悪天候, 点群フィルタリング, センサー知覚