Clear Sky Science · ar
إزالة القيم المتطرفة مقسمة مكانياً لتنقية بيانات LiDAR في ظروف جوية قاسية
الرؤية بوضوح خلال المطر والثلج
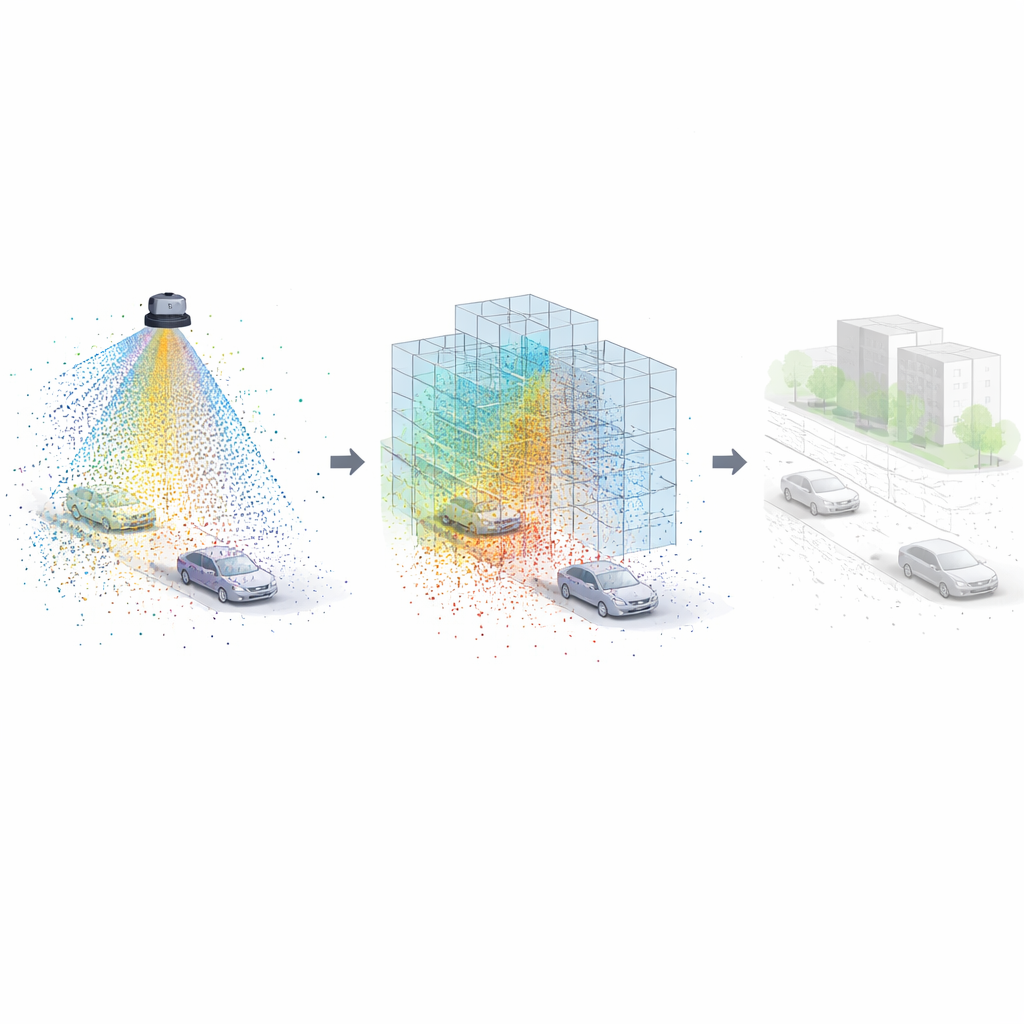
تعتمد السيارات ذاتية القيادة على حسّاسات تعمل بالليزر تُسمّى LiDAR لبناء صورة ثلاثية الأبعاد للعالم. ولكن عندما يصبح الطقس قاسياً — مثل الثلج أو المطر أو الضباب — تلتقط هذه الحساسات انعكاسات لا تحصى من القطرات والرذاذ، مما يملأ المشهد بنقاط زائفة. تقدم هذه الدراسة طريقة جديدة لتنظيف مسوحات LiDAR هذه بسرعة ودقة، مما يساعد المركبات المستقلة على «رؤية» الطريق والعوائق الحقيقية حتى في ظروف قاسية.
لماذا تُعمي الأحوال الجوية السيئة العين الليزرية
يعمل LiDAR بإرسال نبضات ليزر وقياس الانعكاسات لتكوين سحابة مكونة من ملايين النقاط ثلاثية الأبعاد. في الطقس الصافي، تأتي معظم تلك النقاط من أجسام حقيقية مثل السيارات والمباني وسطوح الطريق. أما في الثلج أو المطر الغزير، فالكثير من النقاط تنتج عن جسيمات صغيرة عالقة في الهواء. الأساليب التقليدية لتنظيف البيانات تنظر إلى المسافات بين النقاط أو شدة انعكاسها للضوء. ورغم أن هذه الطرق يمكن أن تزيل بعض الضجيج، إلا أنها غالباً ما تكافح للعمل في الوقت الحقيقي وتُعرض لحذف نقاط حقيقية كثيرة أو ترك نقاط زائفة كثيرة، خاصة عندما يتغير نمط النقاط بالمسافة وزاوية الرصد.
تقسيم المشهد إلى أجزاء يمكن إدارتها
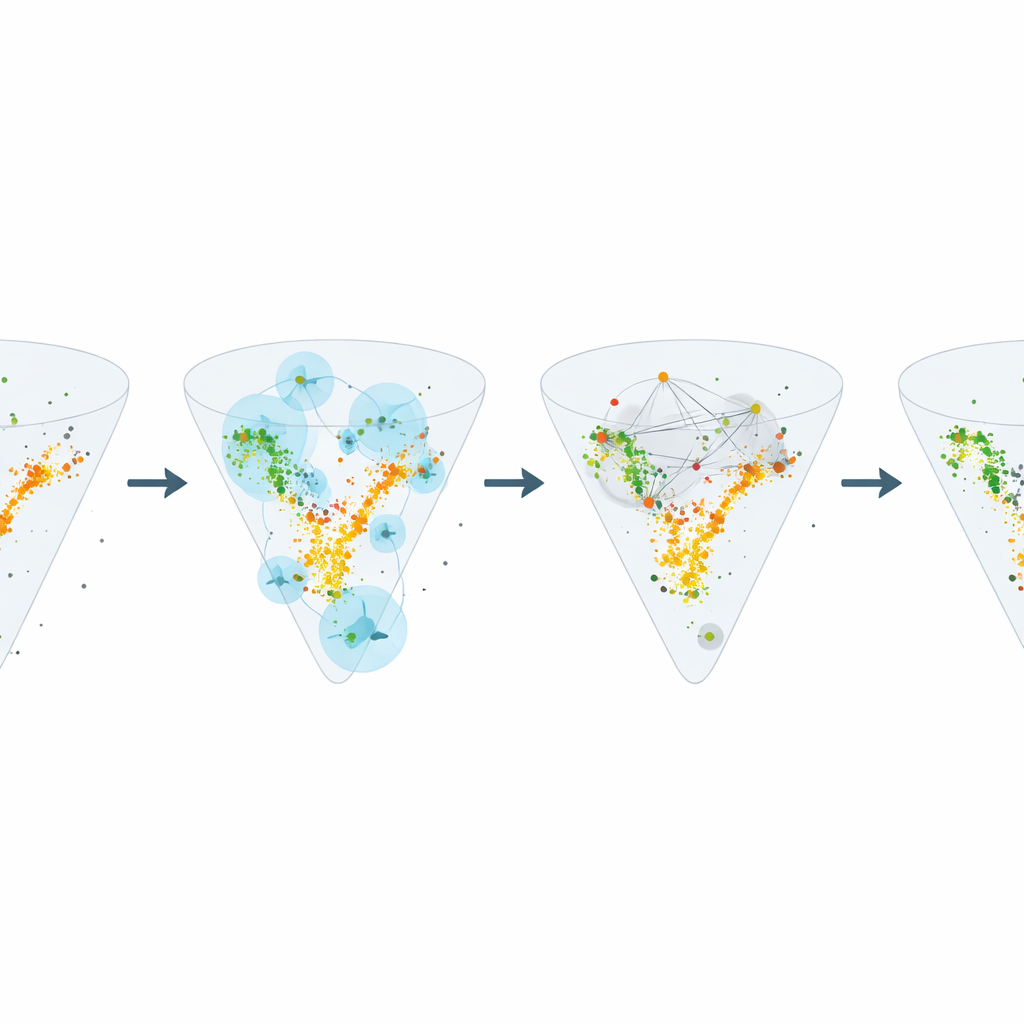
يقترح الباحثون طريقة إزالة القيم المتطرفة مقسمة مكانياً (SDOR)، وهي طريقة تتعامل مع التشويش أولاً بتقسيم مجال رؤية LiDAR إلى العديد من المناطق الصغيرة، أو القطاعات، أفقياً وعمودياً. بدلاً من التعامل مع المشهد بأكمله كسحابة موحدة كبيرة، تعامل SDOR كل قطاع كمشهد مصغر مستقل. داخل كل قطاع، ينظر الخوارزم إلى عدد النقاط المنتشرة ومدى تشتتها. هذا التقسيم يفتح فائدتين رئيسيتين: يمكن معالجة كل قطاع بالتوازي على معالجات متعددة النوى، ويمكن للطريقة تعديل سلوكها وفقاً للظروف المحلية في تلك المنطقة، مثل قربها من السيارة أو بعدها، وكثافتها من النقاط أو ندرتها.
السماح للبيانات بتقرير ما يُعتبر ضجيجاً
بعد تقسيم المشهد، تُقدّر SDOR مدى ازدحام كل قطاع مقارنة بالسحابة العامة. ثم تضبط نصف قطر البحث — المنطقة المحيطة بكل نقطة التي تُفحص — ليتناسب مع كل من المسافة عن المستشعر والكثافة المحلية. تحصل النقاط القريبة من السيارة أو في مناطق مكتظة على أحياء أصغر؛ والمناطق البعيدة أو القليلة النقاط تحصل على أحياء أكبر. لكل نقطة، تعدّ الخوارزمية عدد الجيران داخل هذا النصف قطر. إذا كان عددهم قليلاً جداً، تُعامل تلك النقطة كقيمة متطرفة — محتملة أن تكون رقاقَة ثلج أو قطرة مطر أو انعكاس ضباب — وتُزال. هذه الاستراتيجية الواعية بالكثافة تتجنب استخدام قاعدة ثابتة واحدة في كل مكان وتسمح للبيانات بتحديد النقاط الموثوقة وتلك التي يجب التخلص منها.
أداء سريع ومستقر عبر مشاهد عاصفة متعددة
اختبر الباحثون SDOR على مجموعتي بيانات متطلبتين: إحداهما جُمعت في ظروف شتوية حقيقية مع نقاط ثلج معنونة، والأخرى تُحاكي الثلج والمطر والضباب فوق مشاهد قيادة حضرية. قارنوا SDOR مع ثماني طرق موجودة، بما في ذلك مرشحات كلاسيكية قائمة على المسافة ومرشحات قائمة على الشدة تعتمد على سطوع الانعكاسات ومتغيرات ديناميكية أكثر تعقيداً. حققت SDOR نتائج عالية باستمرار في تحديد ضجيج الطقس بشكل صحيح مع الحفاظ على الأجسام الحقيقية، وحققت بعض أقل معدلات الخطأ. والأهم من ذلك، وبفضل تصميمها القطاعي المتوازي، عالجت SDOR الإطارات أسرع من طرق قائمة على المسافة وتنافست أو تفوقت على العديد من الطرق القائمة على الشدة من حيث السرعة، وكل ذلك مع بقاء الدقة أعلى واستقرار أكبر بين الإطارات.
رؤية ثلاثية الأبعاد أوضح لقيادة آمنة أكثر
بعبارات مبسطة، تُعلم SDOR السيارة ذاتية القيادة تجاهل «الضجيج» البصري الذي تسببه الأحوال الجوية السيئة من دون فقدان رؤية الأشياء المهمة — المركبات الأخرى والمشاة والطريق نفسه. من خلال تقطيع المشهد إلى أجزاء وتكييف قواعدها وفقاً لظروف كل جزء المحلية، توفّر الطريقة رؤى ثلاثية الأبعاد نظيفة وموثوقة بسرعة كافية للاستخدام في الوقت الحقيقي أثناء القيادة. يجعل هذا SDOR مكوّناً واعداً لأنظمة أكثر أماناً للمركبات الذاتية التي تستطيع الحفاظ على إدراك موثوق حتى عندما يكون الطقس بعيداً عن المثالية.
الاستشهاد: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
الكلمات المفتاحية: تنقية LiDAR, القيادة الذاتية, الظروف الجوية القاسية, تصفية سحب النقاط, استشعار وملاحظة