Clear Sky Science · pl
Usuwanie odchyleń podzielone przestrzennie do odszumiania LiDAR w niekorzystnych warunkach pogodowych
Jasne widzenie przez deszcz i śnieg
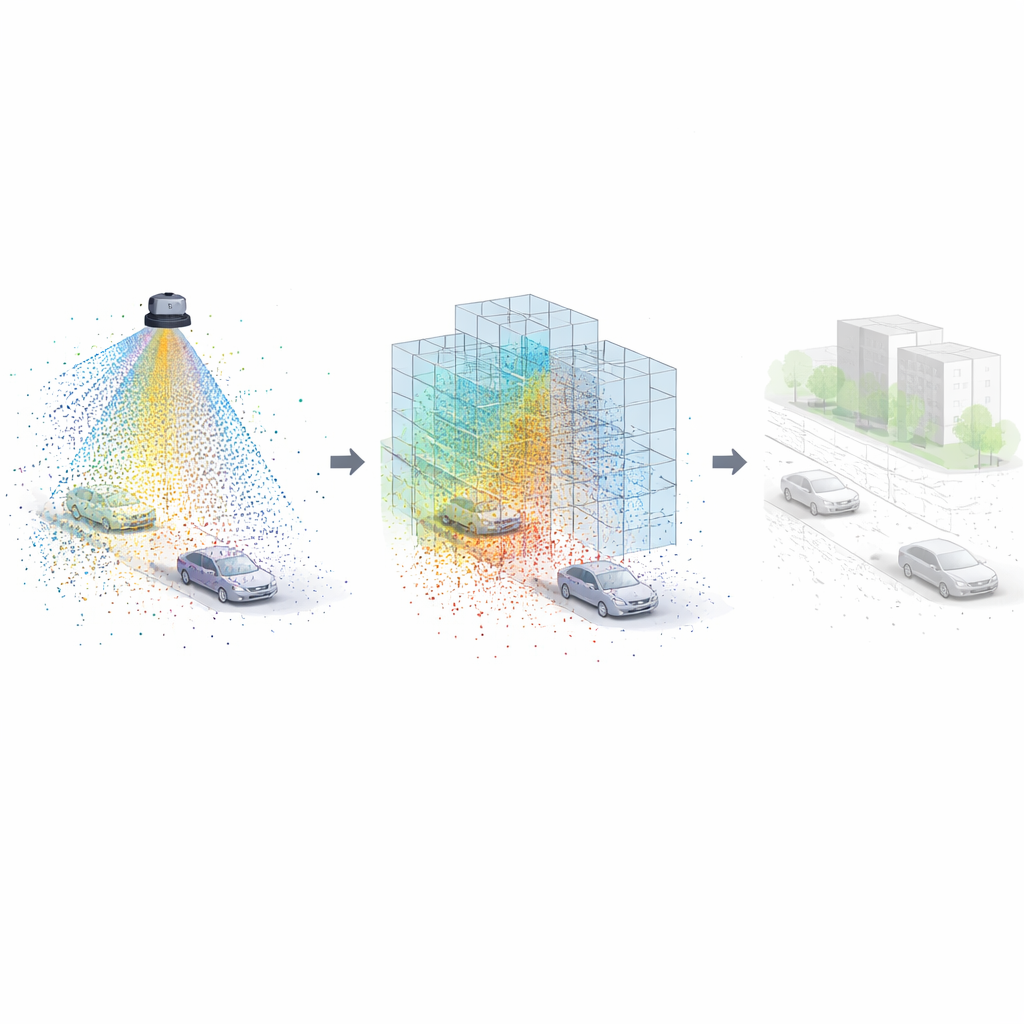
Samochody autonomiczne polegają na czujnikach laserowych, zwanych LiDAR, które tworzą trójwymiarowy obraz świata. Jednak gdy pogoda się psuje — śnieg, deszcz czy mgła — czujniki te rejestrują niezliczone odbicia od kropelek i płatków, zanieczyszczając obraz fałszywymi punktami. W tym badaniu przedstawiono nowy sposób szybkiego i precyzyjnego oczyszczania takich zabałaganionych skanów LiDAR, co pomaga pojazdom autonomicznym „widzieć” drogę i prawdziwe przeszkody nawet w trudnych warunkach.
Dlaczego zła pogoda oślepia laserowe oczy
LiDAR działa, wysyłając impulsy laserowe i mierząc odbicia, aby stworzyć chmurę milionów punktów 3D. W czystej pogodzie większość tych punktów pochodzi z prawdziwych obiektów, takich jak samochody, budynki czy nawierzchnia drogi. W śniegu lub intensywnym deszczu wiele punktów jednak powstaje w wyniku odbić od drobnych cząstek zawieszonych w powietrzu. Tradycyjne metody oczyszczania patrzą na odległości między punktami lub na intensywność odbicia. Chociaż takie podejścia potrafią usunąć część zakłóceń, często mają trudności z pracą w czasie rzeczywistym i albo usuwają zbyt wiele prawdziwych punktów, albo pozostawiają za dużo fałszywych, szczególnie gdy układ punktów zmienia się wraz z odległością i kątem obserwacji.
Podział widoku na przystępne fragmenty
Autorzy proponują Spatially Divided Outlier Removal (SDOR), metodę, która radzi sobie z zanieczyszczeniami, najpierw dzieląc pole widzenia LiDAR na wiele małych obszarów, czyli sektorów, zarówno w poziomie, jak i w pionie. Zamiast traktować całą scenę jako jedną dużą, jednorodną chmurę, SDOR traktuje każdy sektor jako niezależną mini-scenę. W obrębie każdego sektora algorytm sprawdza, ile punktów się znajduje i jak są rozproszone. Ten podział daje dwa kluczowe korzyści: każdy sektor może być przetwarzany równolegle na wielordzeniowych procesorach, a metoda może dostosować swoje działanie do lokalnych warunków danego obszaru, na przykład czy jest blisko samochodu, daleko, gęsty punktowo czy stosunkowo rzadki.
Pozwolenie danym decydować, co jest szumem
Po podziale sceny SDOR ocenia, jak bardzo zapełniony jest każdy sektor w porównaniu z całą chmurą. Następnie dostosowuje promień przeszukiwania — sąsiedztwo wokół każdego punktu, które jest sprawdzane — tak, aby odpowiadał zarówno odległości od sensora, jak i lokalnej gęstości. Punkty blisko samochodu lub w gęsto upakowanych obszarach otrzymują mniejsze sąsiedztwa; obszary odległe lub rzadkie — większe. Dla każdego punktu algorytm liczy, ile sąsiadów znajduje się w tym promieniu. Jeśli jest ich zbyt mało, punkt traktowany jest jako odchylenie — prawdopodobnie płatek śniegu, kropla deszczu lub odbicie mgły — i jest usuwany. Ta strategia uwzględniająca gęstość unika stosowania jednej sztywnej reguły dla całej sceny i zamiast tego pozwala, by to dane decydowały, które punkty są godne zaufania, a które należy odrzucić.
Szybkie, stabilne działanie w wielu burzowych scenach
Naukowcy przetestowali SDOR na dwóch wymagających zbiorach danych: jednym zebranym w rzeczywistych zimowych warunkach z oznaczonymi punktami śniegu, oraz innym, który symuluje śnieg, deszcz i mgłę nad miejskimi scenami drogowymi. Porównali SDOR z ośmioma istniejącymi metodami, w tym klasycznymi filtrami opartymi na odległości, filtrami intensywności opartymi na jasności sygnałów oraz bardziej złożonymi wariantami dynamicznymi. SDOR konsekwentnie osiągał wysokie wyniki w poprawnym identyfikowaniu zakłóceń pogodowych przy zachowaniu prawdziwych obiektów, przy czym notował jedne z najniższych wskaźników błędów. Co istotne, dzięki projektowi opartemu na sektorach i przetwarzaniu równoległym, SDOR przetwarzał klatki szybciej niż inne metody oparte na odległości, a nawet rywalizował lub przewyższał wiele metod opartych na intensywności pod względem szybkości, pozostając jednocześnie dokładniejszym i bardziej stabilnym między kolejnymi klatkami.
Czystsza wizja 3D dla bezpieczniejszej jazdy autonomicznej
Mówiąc prościej, SDOR uczy samochód autonomiczny ignorować wizualny „szum” wywołany złą pogodą, nie tracąc jednocześnie z pola widzenia istotnych elementów — innych pojazdów, pieszych i samej drogi. Dzieląc scenę na kawałki i dostosowując reguły do lokalnych warunków każdego kawałka, metoda dostarcza czyste, wiarygodne widoki 3D wystarczająco szybko, by używać ich w czasie rzeczywistym podczas jazdy. To czyni SDOR obiecującym elementem dla bezpieczniejszych pojazdów autonomicznych, które mogą utrzymać niezawodną percepcję nawet gdy pogoda jest daleka od idealnej.
Cytowanie: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Słowa kluczowe: Odszumianie LiDAR, samochody autonomiczne, niekorzystne warunki pogodowe, filtrowanie chmury punktów, percepcja czujników