Clear Sky Science · ru
Пространственное деление и удаление выбросов для подавления шумов LiDAR в неблагоприятных погодных условиях
Ясное видение сквозь дождь и снег
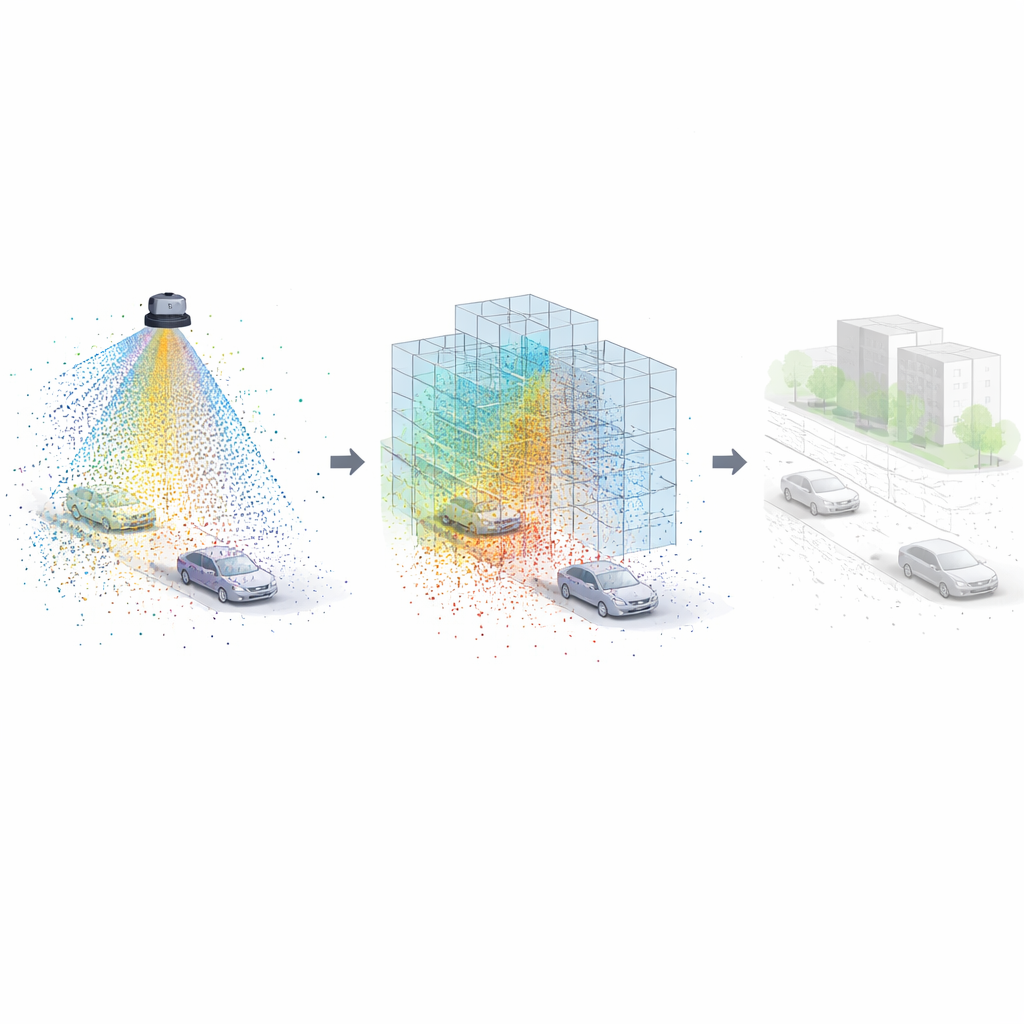
Автомобили с автопилотом полагаются на лазерные датчики, называемые LiDAR, чтобы строить трёхмерную картину окружающего мира. Но когда погода портится — снег, дождь или туман — эти датчики фиксируют множество отражений от капель и хлопьев, засоряя изображение ложными точками. В этом исследовании представлен новый способ быстро и точно очищать такие запачканные сканы LiDAR, помогая автономным транспортным средствам «видеть» дорогу и реальные препятствия даже в суровых условиях.
Почему плохая погода заслоняет лазерные «глаза»
LiDAR работает, посылая лазерные импульсы и измеряя отражения, чтобы создать облако из миллионов 3D-точек. В ясную погоду большая часть этих точек принадлежит реальным объектам — автомобилям, зданиям и поверхности дорог. Однако в снегу или сильном дожде многие точки возникают из-за мелких частиц в воздухе. Традиционные методы очистки смотрят на расстояния между точками или на интенсивность отражения. Хотя такие подходы могут удалить часть шума, они часто не успевают работать в реальном времени и либо удаляют слишком много реальных точек, либо оставляют слишком много ложных, особенно когда распределение точек меняется с дистанцией и углом обзора.
Разделение обзора на управляемые участки
Авторы предлагают метод Spatially Divided Outlier Removal (SDOR), который борется с помехами, сначала разделяя поле зрения LiDAR на множество небольших областей, или секторов, по горизонтали и вертикали. Вместо того чтобы рассматривать всю сцену как одно большое однородное облако, SDOR рассматривает каждый сектор как независимую мини‑сцену. Внутри каждого сектора алгоритм анализирует, сколько точек присутствует и насколько они разбросаны. Такое деление даёт два ключевых преимущества: каждый сектор можно обрабатывать параллельно на многопроцессорных системах, а метод может адаптироваться к локальным условиям области — близость к автомобилю, удалённость, плотность точек или, наоборот, разрежённость.
Пусть данные решают, что считать шумом
После разделения сцены SDOR оценивает, насколько заполнен каждый сектор по сравнению с общим облаком точек. Затем он подстраивает радиус поиска — окрестность вокруг каждой точки, которая проверяется — чтобы учесть и расстояние до датчика, и локальную плотность. Точки рядом с автомобилем или в плотных областях получают меньшие окрестности; удалённые или разрежённые области — большие. Для каждой точки алгоритм подсчитывает, сколько соседей попадает в этот радиус. Если их слишком мало, точка считается выбросом — вероятно, снежинкой, каплей дождя или отражением в тумане — и удаляется. Эта стратегия, учитывающая плотность, избегает единого фиксированного правила для всей сцены и позволяет данным определять, каким точкам доверять, а какие отбрасывать.
Быстрая и стабильная работа в самых разных штормовых сценах
Исследователи протестировали SDOR на двух требовательных наборах данных: один собран в реальных зимних условиях с размеченными снежными точками, а другой моделирует снег, дождь и туман для городских сценариев вождения. Они сравнили SDOR с восемью существующими методами, включая классические фильтры, основанные на расстоянии, фильтры по интенсивности, опирающиеся на яркость отражений, и более сложные динамические варианты. SDOR постоянно давал высокие показатели в корректном выявлении погодного шума при сохранении реальных объектов и показывал одни из самых низких уровней ошибок. И что важно — благодаря секторной параллельной архитектуре SDOR обрабатывал кадры быстрее, чем другие методы на основе расстояния, а по скорости соперничал или превосходил многие методы, зависящие от интенсивности, при этом оставаясь более точным и более стабильным от кадра к кадру.
Чёткое 3D‑зрение для более безопасного автономного вождения
Проще говоря, SDOR учит автомобиль с автопилотом игнорировать визуальный «шум», вызванный плохой погодой, не теряя при этом из виду важные объекты — другие машины, пешеходов и само дорожное полотно. Разбивая сцену на участки и подстраивая правила для каждой локальной области, метод обеспечивает чистые и надёжные 3D‑изображения достаточно быстро для работы в реальном времени. Это делает SDOR перспективным строительным блоком для более безопасных автономных транспортных средств, которые сохраняют стабильное восприятие даже при далеких от идеала погодных условиях.
Цитирование: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Ключевые слова: Подавление шумов LiDAR, автономное вождение, неблагоприятная погода, фильтрация облаков точек, восприятие датчиков