Clear Sky Science · zh
一种以生物为灵感的折纸电容机器人电子皮肤,具备多模态感知能力
让机器人更安全的智慧触觉
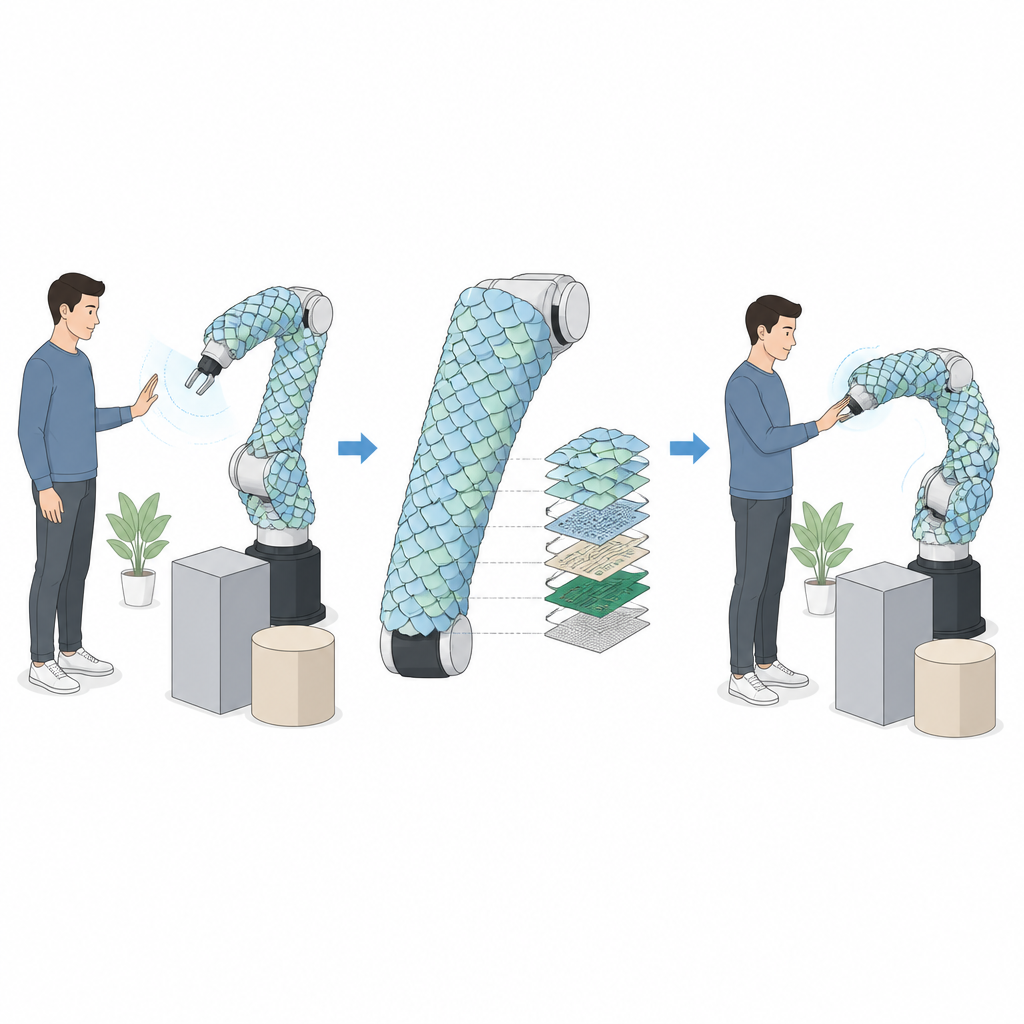
想象一种机器人,它能感知轻轻一拍,在接触前就察觉到靠近的手,并能够平稳反应而不是猛地停住。该研究介绍了一种新型电子皮肤,像柔性外壳一样包裹在机器表面,使其获得类似生物的触觉与接近感知,同时保持硬件薄、结实且适合实际应用。
为什么机器人需要更好的皮肤
随着机器人走出工厂进入家庭、医院和共享工作空间,它们必须应对与人的近距离接触。传统触觉传感通常依赖密集的小型传感单元网格,这会很快变得复杂、笨重,并且难以在大面积上布线。因此难以用连续、灵敏的表面覆盖整个机器人臂或机体。新工作通过创造一种大面积“电子皮肤”来解决这个问题,该皮肤所需的传感通道远少于传统设计,但仍能定位触点及测量触压强度。
借鉴鱼与纸折的创意
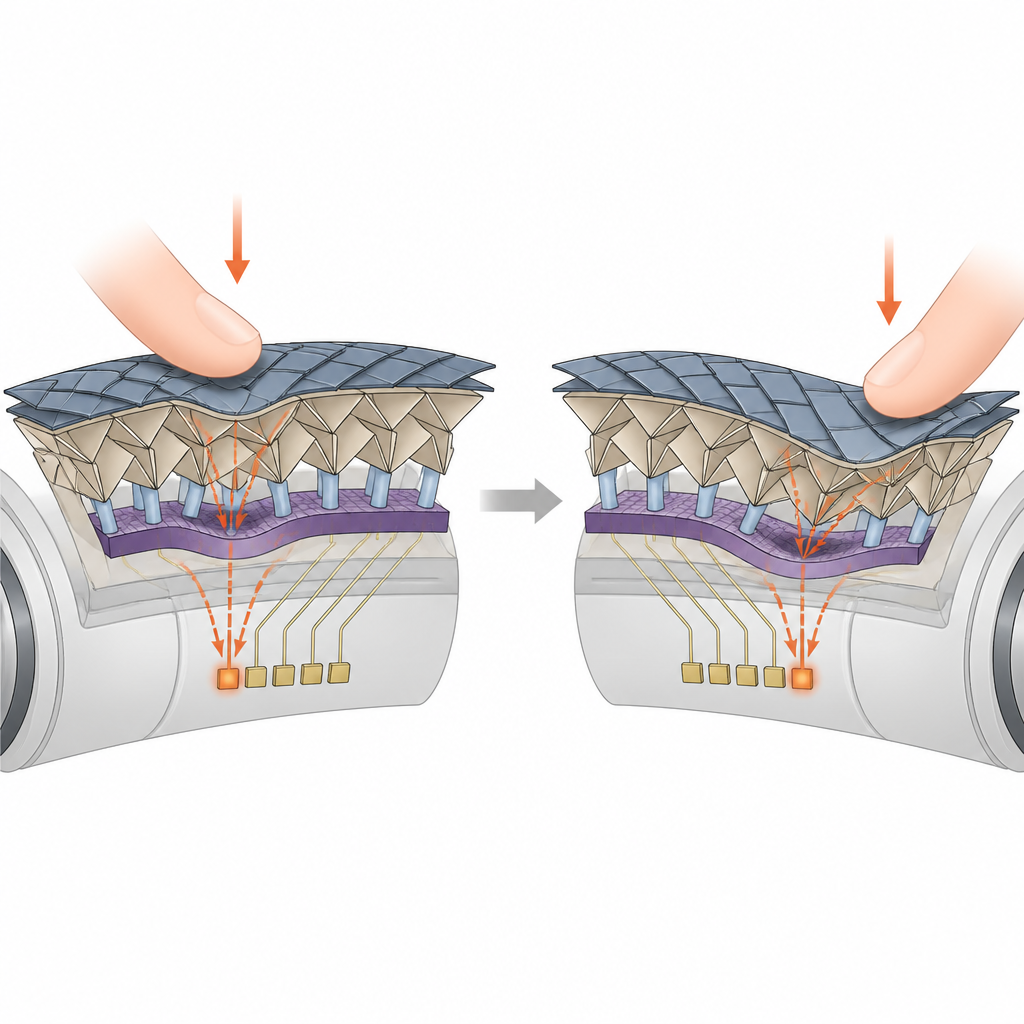
研究团队从鱼皮和折纸中汲取灵感。鱼鳞重叠形成既柔韧又有保护性的表面;折纸图案能让平面展开成复杂的三维结构。团队将这些理念组合成分层结构:上层为柔软弹性体“鳞片”,中间为折纸图案的电路层,下面为支撑柱和剪切传感元件。当某处受压时,折纸框架把变形沿侧向在多个单元间扩散。通过在少数电极处测量极小的电容变化,系统可以推断出比传统设计大得多面积上的触摸位置与力度。
一层薄皮,多个感知
该电子皮肤不仅仅是压力垫。它分离出三种信息:法向压力(垂直按压)、剪切力(横向滑动)和导电物体(如人手)的接近。折纸骨架对按压与滑动有不同响应,使设计者能读出法向力和剪切力且相互干扰最小。顶部的一层薄金属镀膜作为接近传感器,在导电物体接近时检测到电场变化,甚至在接触前就能感知。尽管堆叠了五层功能层,整块皮肤仍只有约9毫米厚,可制成平面或曲面并贴合圆形机器人臂。
通过数据与设计实现更精细的触觉
单靠机械设计无法达到非常精细的触觉分辨率,因此团队借助机器学习。他们通过在不同位置和不同力度下按压皮肤收集了数千个数据点,然后训练神经网络模型,将电容变化模式映射为精确的触点位置和力量。采用这种方法,皮肤实现了“超分辨率”:其定位精度远高于电极间距,平均位置误差仅为几毫米,力的误差仅为几百分之一牛顿。通过巧妙地组合单次触摸测量,他们还将方法扩展到同时识别多个触点,只要这些触点不紧邻在一起。
能感知并避让你的机器人
为展示实际应用,研究人员将多个弯曲的电子皮肤模块安装在机器人臂上。当有人按压臂部时,机器人会沿着推力方向移动或对侧向力做出旋转响应,使控制更直观。当手接近但未接触时,接近层会检测到并能减速或停止机械臂,或以安全距离跟踪手部。该系统还允许机器人绕过导电障碍物,改变路径而不中断任务。综合这些能力,表明配备这样一种既能感触接触又能感知附近事物的皮肤,机器人可以更安全、更自然地与人共享空间。
引用: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
关键词: 电子皮肤, 机器人触觉感知, 折纸结构, 人机交互, 接近传感