Clear Sky Science · fr
Une peau électronique robotique capacitive inspirée du vivant et de l’origami, avec capacités sensorielles multimodales
Un toucher intelligent pour des robots plus sûrs
Imaginez un robot capable de sentir une légère tape, de détecter une main proche avant le contact et de réagir en douceur plutôt que de s’arrêter brutalement. Cette étude décrit une nouvelle forme de peau électronique qui enveloppe les machines comme une coque flexible, leur apportant un sens du toucher et de la proximité proche de celui des êtres vivants, tout en gardant le matériel fin, robuste et adapté à une utilisation réelle.
Pourquoi les robots ont besoin d’une meilleure peau
À mesure que les robots sortent des usines pour entrer dans les maisons, les hôpitaux et les lieux de travail partagés, ils doivent gérer des contacts rapprochés avec des personnes. Les capteurs tactiles traditionnels reposent souvent sur des grilles denses de petites unités sensorielles, qui deviennent vite complexes, volumineuses et difficiles à câbler sur de larges surfaces. Il est donc ardu de couvrir un bras ou un corps de robot entier d’une surface continue et sensible. Ce travail relève le défi en créant une « e-skin » de grande surface nécessitant bien moins de canaux de détection tout en pouvant localiser la position et la force du contact.
Emprunter des idées aux poissons et au pliage du papier
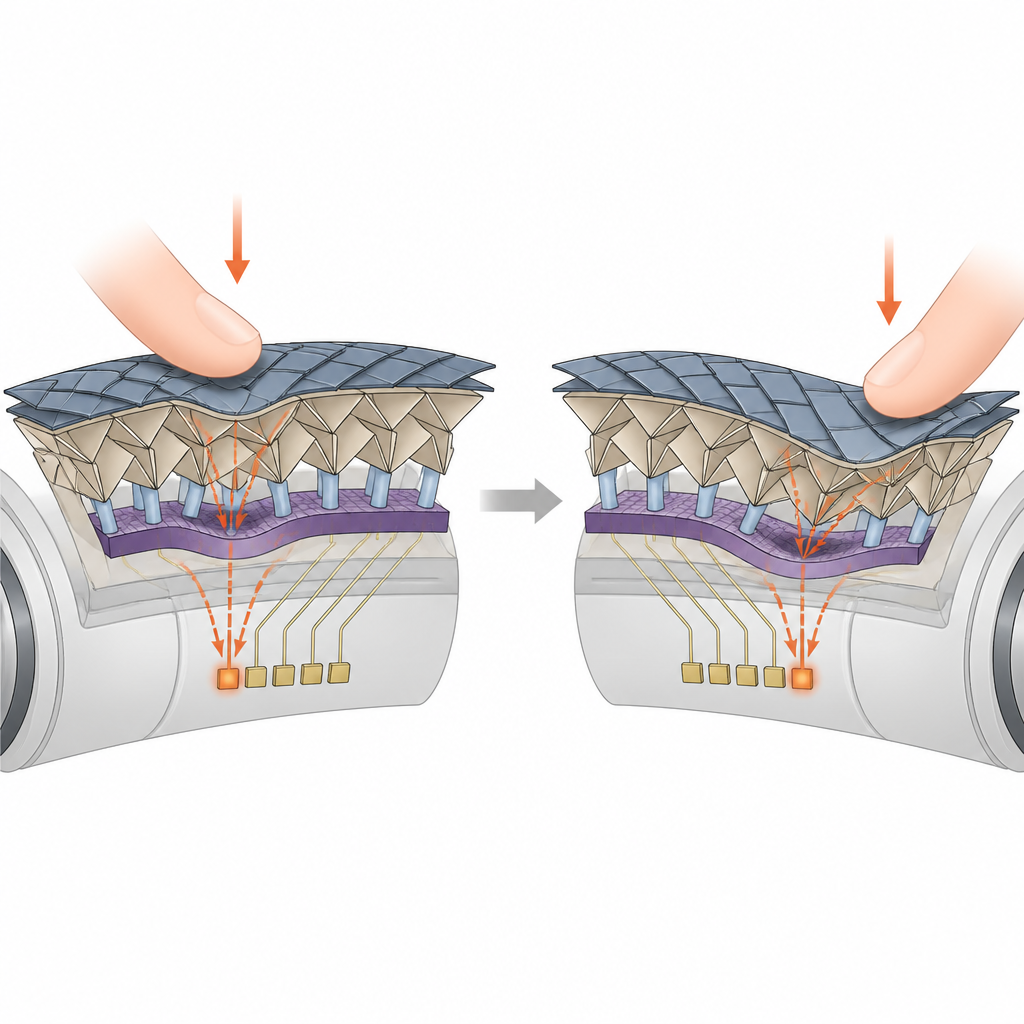
Les chercheurs se sont inspirés de la peau des poissons et de l’origami. Les écailles de poisson se chevauchent pour former une surface flexible mais protectrice. Les motifs d’origami permettent à une feuille plate de se plier en formes tridimensionnelles complexes. L’équipe a combiné ces idées en une structure multicouche : des « écailles » en élastomère souple en surface, une couche de circuits au motif origami au milieu, et des piliers de soutien et éléments de détection de cisaillement en dessous. Quand une pression s’exerce à un point, l’armature en origami répartit la déformation latéralement à travers de nombreuses cellules. En mesurant de faibles variations de capacitance sur un petit nombre d’électrodes, le système peut déduire la position et l’intensité du contact sur une surface bien plus vaste que les conceptions conventionnelles.
Plusieurs sens dans une seule couche fine
Cette e-skin est plus qu’un simple tapis de pression. Elle sépare trois types d’informations : la pression normale (enfoncement), la force de cisaillement (glissement) et la proximité d’objets conducteurs comme une main humaine. L’armature origami réagit différemment à la pression et au glissement, permettant aux concepteurs de lire les forces normales et de cisaillement avec une interférence minimale. Un film mince métallisé en surface sert de capteur de proximité, détectant les variations du champ électrique lorsqu’un objet conducteur s’approche, même avant le contact. Malgré l’empilement de cinq couches fonctionnelles, la peau ne mesure qu’environ 9 millimètres d’épaisseur, peut être fabriquée plane ou courbée et s’adapte aux bras de robot ronds.
Un toucher plus précis grâce aux données et au design
Le seul design mécanique ne suffit pas pour atteindre une très fine résolution tactile, l’équipe a donc recours à l’apprentissage automatique. Ils ont collecté des milliers de points de données en pressant la peau à différents endroits et avec différentes forces, puis entraîné des réseaux neuronaux pour mapper le motif des variations de capacitance vers la position et la force exactes du contact. Avec cette approche, la peau atteint une « super-résolution » : elle localise les touches bien plus précisément que ne le laisserait supposer l’espacement des électrodes, avec des erreurs moyennes de position de seulement quelques millimètres et des erreurs de force de quelques centièmes de newton. En combinant astucieusement les mesures de touches uniques, ils ont aussi étendu la méthode pour reconnaître plusieurs contacts simultanés, tant que les points touchés ne sont pas immédiatement adjacents.
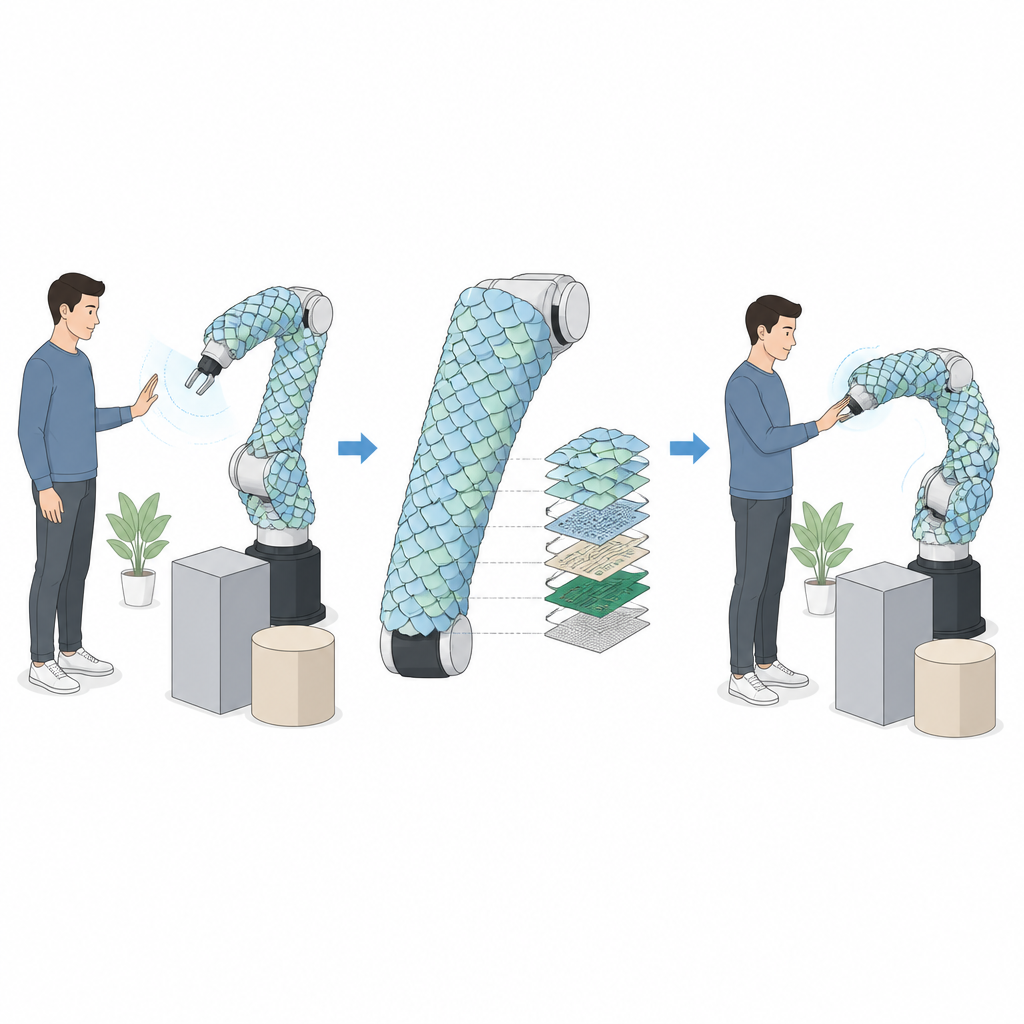
Des robots qui vous sentent et vous évitent
Pour démontrer une utilisation pratique, les chercheurs ont monté plusieurs modules d’e-skin courbés sur un bras robotique. Lorsqu’une personne appuie sur le bras, le robot se déplace dans la direction de la poussée ou pivote en réponse à des forces latérales, rendant le contrôle plus intuitif. Quand une main s’approche sans toucher, la couche de proximité la détecte et peut ralentir ou arrêter le bras, ou l’aider à suivre la main à une distance sûre. Le système permet aussi au robot d’éviter des obstacles conducteurs en modifiant sa trajectoire sans interrompre sa tâche. Ensemble, ces capacités annoncent des robots partageant l’espace avec les humains de façon plus sûre et plus naturelle, guidés par une peau qui sent à la fois le contact et ce qui se trouve à proximité.
Citation: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Mots-clés: peau électronique, détection du toucher robotique, structures en origami, interaction humain-robot, détection de proximité