Clear Sky Science · he
עור אלקטרוני קפיצי ביוהשראה מבוסס אוריגמי עם יכולות חישה מולטימודליות
מישוש חכם לרובוטים בטוחים יותר
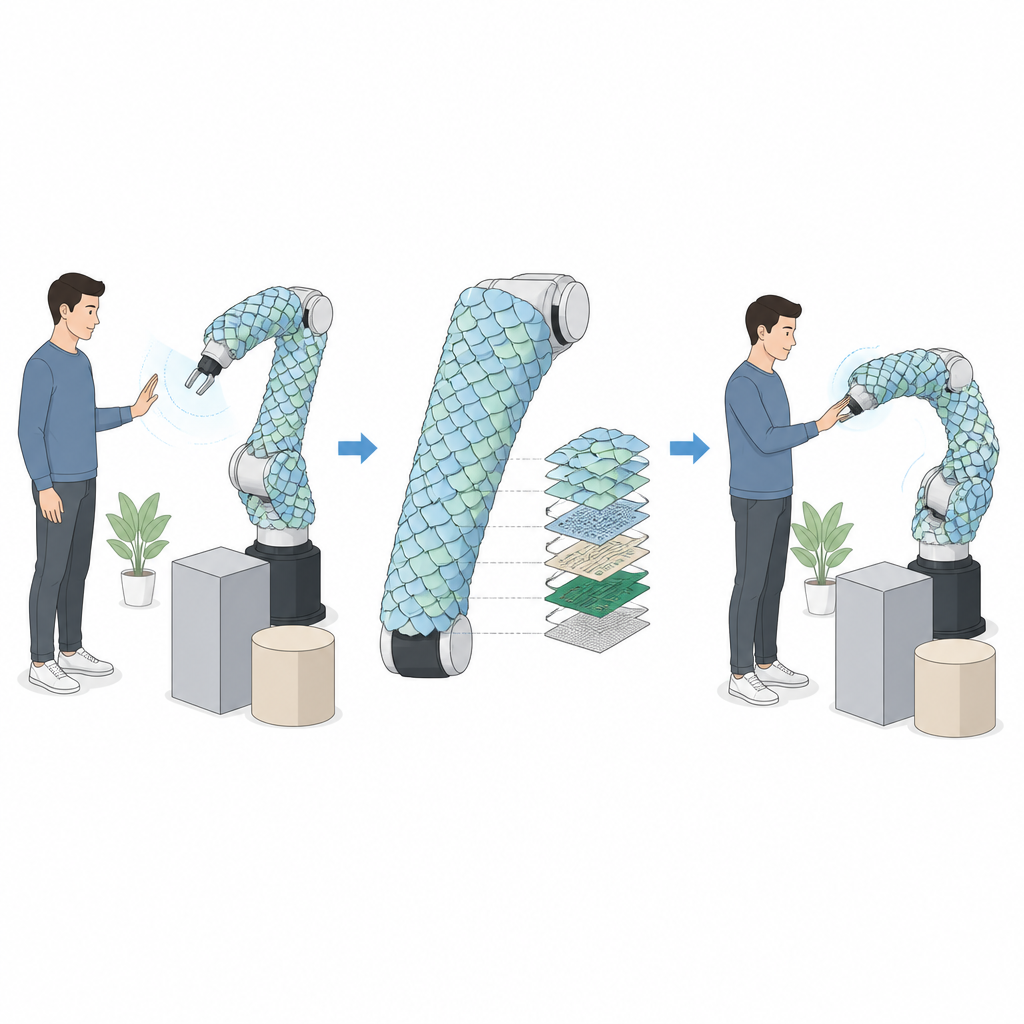
דמיינו רובוט שיכול להרגיש נגיעה עדינה, לחוש יד קרובה לפני מגע ולהגיב בצורה חלקה במקום לעצור בסחף. המחקר הזה מתאר סוג חדש של עור אלקטרוני העוטף מכונות כקליפה גמישה, ומעניק להן תחושת מישוש וקרבה הדומה ליצור חי, תוך שמירה על חומרה דקה, עמידה ומעשית לשימוש בעולם האמיתי.
מדוע רובוטים זקוקים לעור טוב יותר
כשמכונות יוצאות מהמפעלים ונכנסות לבתים, בתי חולים וסביבות עבודה משותפות, עליהן להתמודד עם מגע קרוב לאנשים. חיישני מגע מסורתיים מבוססים לעתים על מערכי גריד צפופים של יחידות חישה זעירות, שמסתבכים במהירות, תופסים מקום וקשיים בחיווט על שטחים גדולים. זה מקשה לכסות זרוע רובוטית או גוף שלם במשטח רגיש רציף. העבודה החדשה מטפלת בבעיה זו על ידי יצירת "עור-א" גדול-שטח שדורש הרבה פחות ערוצי חישה ועדיין יכול לזהות היכן ובאיזה כוח נוגעים בו.
הלוואה מדגים וקיפולי נייר
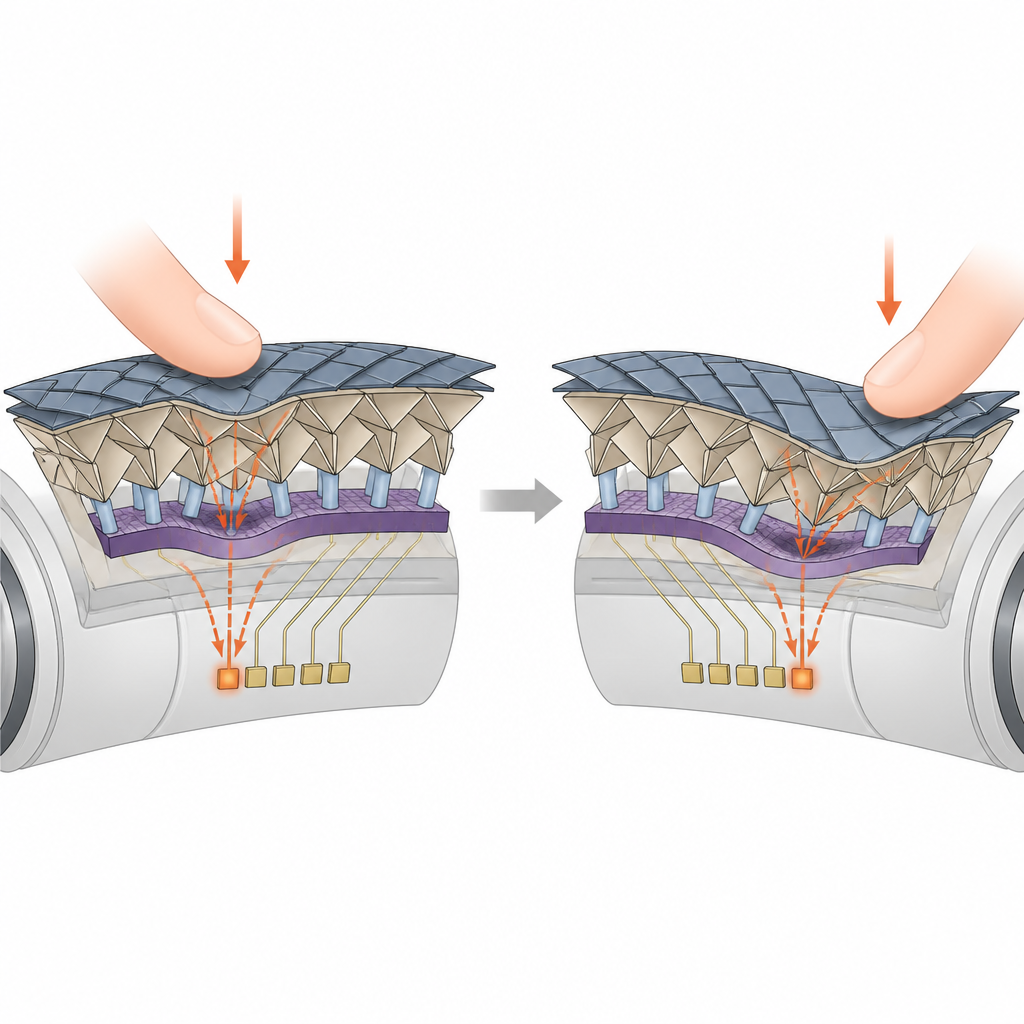
החוקרים שאבו השראה מעור דגים ומאוריגמי. קשקשי דגים חופפים זה לזה ליצירת משטח גמיש אך מגן. דפוסי אוריגמי מאפשרים לגיליון שטוח להתקפל לצורות תלת־ממדיות מסובכות. הצוות שילב רעיונות אלה למבנה רב-שכבתי: "קשקשי" אלסטומר רכים למעלה, שכבת מעגלים בדפוס אוריגמי במרכז, ועמודי תמיכה ורכיבי חישה לגזירה מתחת. כאשר לחץ דוחף בנקודה אחת, שלד האוריגמי מפזר את העיוות הצידה לאורך תאים רבים. על־ידי מדידת שינויים זעירים בקיבוליות חשמלית בכמות קטנה של אלקטרודות, המערכת יכולה להסיק את מיקום ועוצמת המגע על שטח גדול בהרבה ממערכות מסורתיות.
חושים רבים בשכבה דקה אחת
העור הזה הוא יותר מפד מגע פשוט. הוא מפריד שלושה סוגי מידע: לחץ נורמלי (לחיצה פנימה), כוח גזירה (החלקה לאורך) וקרבת עצמים מוליכים כגון יד אנושית. מעוקר האוריגמי מגיב בצורה שונה ללחיצה והחלקה, כך שהמעצבים יכולים לקרוא לחצים נורמליים ולכוחות גזירה עם הפרעה מינימלית. סרט דק מצופה מתכת למעלה משמש כחיישן קרבה, הקולט שינויים בשדה החשמלי כאשר עצם מוליך מתקרב, אפילו לפני מגע. למרות חיבור חמש שכבות פונקציונליות, כל העור נותר בעובי של כ-9 מילימטרים בלבד, ניתן לייצורו שטוח או מעוגל ומתאים לזרועות רובוטיות עגולות.
חדות מישוש משילוב נתונים ועיצוב
העיצוב המכניקלי לבדו לא מספיק כדי להשיג רזולוציית מישוש מאוד עדינה, ולכן הצוות פנה ללמידת מכונה. הם אספו אלפי נקודות נתונים על ידי לחיצה על העור בנקודות שונות ובכוחות שונים, ולאחר מכן אימנו רשתות עצביות למיפוי דפוסי השינוי בקיבוליות אל מיקום ועוצמת המגע המדויקים. בגישה זו, העור משיג "סופר-רזולוציה": הוא יכול למקם נגיעות בדיוק רב יותר מכפי שהמרווח בין האלקטרודות מרמז, עם שגיאות ממוצעות במיקום של כמה מילימטרים בלבד ושגיאות כוח של כמה מאיות ניוטון. על ידי שילוב חכם של מדידות נגיעה יחידות, הם גם הרחיבו את השיטה לזיהוי נגיעות מרובות בו־זמנית, כל עוד הנקודות הנוגעות אינן סמוכות מיידית.
רובוטים שמרגישים ומתחמקים ממך
להדגמת שימוש מעשי, החוקרים הרכיבו מספר מודולי עור מעוקלים על זרוע רובוטית. כאשר אדם לוחץ על הזרוע, הרובוט נע בכיוון הדחיפה או מסתובב בתגובה לכוחות צדדיים, מה שהופך את השליטה לאינטואיטיבית יותר. כאשר יד מתקרבת ללא מגע, שכבת הקרבה מזהה זאת ויכולה להאט או לעצור את הזרוע, או לעזור לה לעקוב אחר היד במרחק בטוח. המערכת גם מאפשרת לרובוט לנווט סביב מכשולים מוליכים, לשנות את מסלולו מבלי להפסיק את המשימה. יחד, יכולות אלה מעידות על רובוטים שמשתפים מרחב עם אנשים בצורה בטוחה וטבעית יותר, מונחית על ידי עור שמרגיש מגע וחושש מהסביבה הקרובה.
ציטוט: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
מילות מפתח: עור אלקטרוני, חיישות מישוש רובוטית, מבני אוריגמי, אינטראקציה בין אדם לרובוט, חישת קרבה