Clear Sky Science · pl
Bioinspirowana origamiowa pojemnościowa e-skóra dla robotów z multimodalnymi zdolnościami sensorycznymi
Inteligentne czucie dla bezpieczniejszych robotów
Wyobraź sobie robota, który potrafi wyczuć delikatne pociągnięcie, zarejestrować zbliżającą się dłoń zanim dojdzie do kontaktu i zareagować płynnie zamiast gwałtownie się zatrzymać. W tym badaniu opisano nowy rodzaj elektronicznej skóry, która owija maszyny jak elastyczna powłoka, nadając im zmysł dotyku i bliskości podobny do organizmów żywych, przy jednoczesnym zachowaniu cienkiej, wytrzymałej i praktycznej konstrukcji do zastosowań w rzeczywistym świecie.
Dlaczego roboty potrzebują lepszej skóry
W miarę jak roboty wychodzą z fabryk i trafiają do domów, szpitali i współdzielonych miejsc pracy, muszą radzić sobie z bliskim kontaktem z ludźmi. Tradycyjne czujniki dotyku często opierają się na gęstych siatkach drobnych elementów pomiarowych, co szybko staje się skomplikowane, nieporęczne i trudne do okablowania na dużych powierzchniach. To utrudnia pokrycie całego ramienia lub ciała robota ciągłą, czułą powłoką. Nowa praca rozwiązuje ten problem, tworząc e-skórę na dużą skalę, która wymaga znacznie mniej kanałów pomiarowych, a mimo to potrafi określić miejsce i siłę dotyku.
Czerpiąc z ryb i sztuki składania papieru
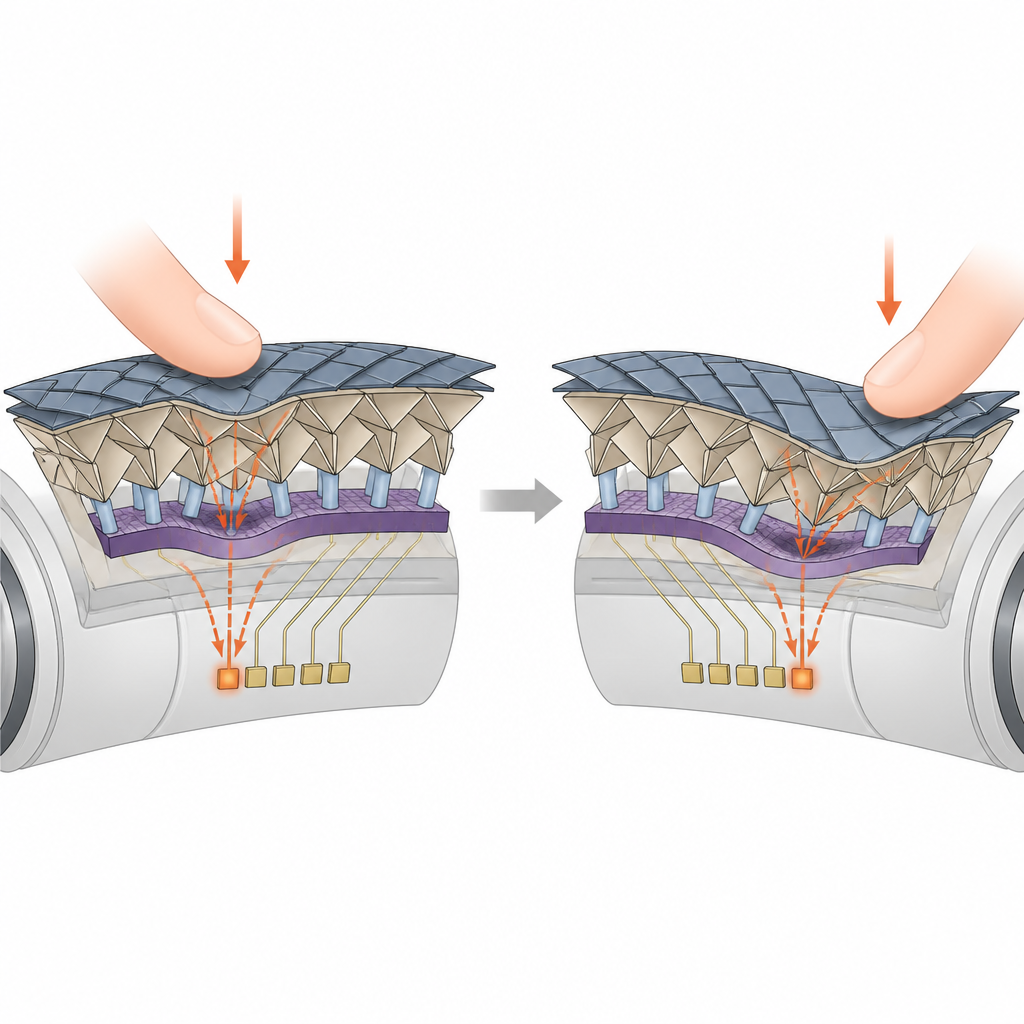
Naukowcy poszukali inspiracji w skórze ryb i origami. Łuski ryb nachodzą na siebie, tworząc elastyczną, ale ochronną powierzchnię. Wzory origami pozwalają płaskiej warstwie składać się w złożone kształty trójwymiarowe. Zespół połączył te idee w warstwową strukturę: miękkie elastomerowe „łuski” na wierzchu, warstwa obwodów z wzorem origami w środku oraz filary podporowe i elementy wykrywające ścinanie pod spodem. Gdy nacisk działa w jednym punkcie, szkielet origami rozprowadza to odkształcenie bocznie przez wiele komórek. Mierząc drobne zmiany pojemności elektrycznej w niewielkiej liczbie elektrod, system może wywnioskować pozycję i siłę dotyku na znacznie większej powierzchni niż w tradycyjnych rozwiązaniach.
Wiele zmysłów w jednej cienkiej warstwie
Ta e-skóra to nie tylko zwykła mata ciśnieniowa. Rozdziela trzy rodzaje informacji: nacisk normalny (wciskanie), siłę ścinającą (ślizganie) oraz zbliżenie przewodzących obiektów, takich jak ludzka dłoń. Kręgosłup origami reaguje inaczej na wciskanie i ślizganie, dzięki czemu projektanci mogą odczytywać siły normalne i ścinające przy minimalnych zakłóceniach. Cienka metalizowana warstwa na wierzchu pełni funkcję czujnika zbliżeniowego, wychwytując zmiany pola elektrycznego, gdy przewodzący obiekt się zbliża, jeszcze przed kontaktem. Pomimo ułożenia pięciu funkcjonalnych warstw, cała skóra ma tylko około 9 milimetrów grubości, może być wykonana płasko lub w formie zakrzywionej i dopasowuje się do okrągłych ramion robota.
Bardziej precyzyjne czucie dzięki danym i projektowaniu
Sama konstrukcja mechaniczna nie wystarcza, by osiągnąć bardzo wysoką rozdzielczość dotyku, więc zespół sięgnął po uczenie maszynowe. Zebrali tysiące punktów danych, naciskając skórę w różnych miejscach i z różną siłą, a następnie wytrenowali modele sieci neuronowych mapujące wzory zmian pojemności na dokładną pozycję i siłę dotyku. Dzięki temu skóra osiąga „super-rozdzielczość”: potrafi lokalizować dotknięcia znacznie precyzyjniej niż sugerowałoby rozmieszczenie elektrod, ze średnimi błędami pozycji rzędu kilku milimetrów i błędami siły na poziomie kilkudziesięciu setnych niutona. Poprzez sprytne łączenie pomiarów z pojedynczych dotknięć, rozszerzyli też metodę na rozpoznawanie wielu dotknięć jednocześnie, o ile miejsca dotknięcia nie są bezpośrednio sąsiadujące.
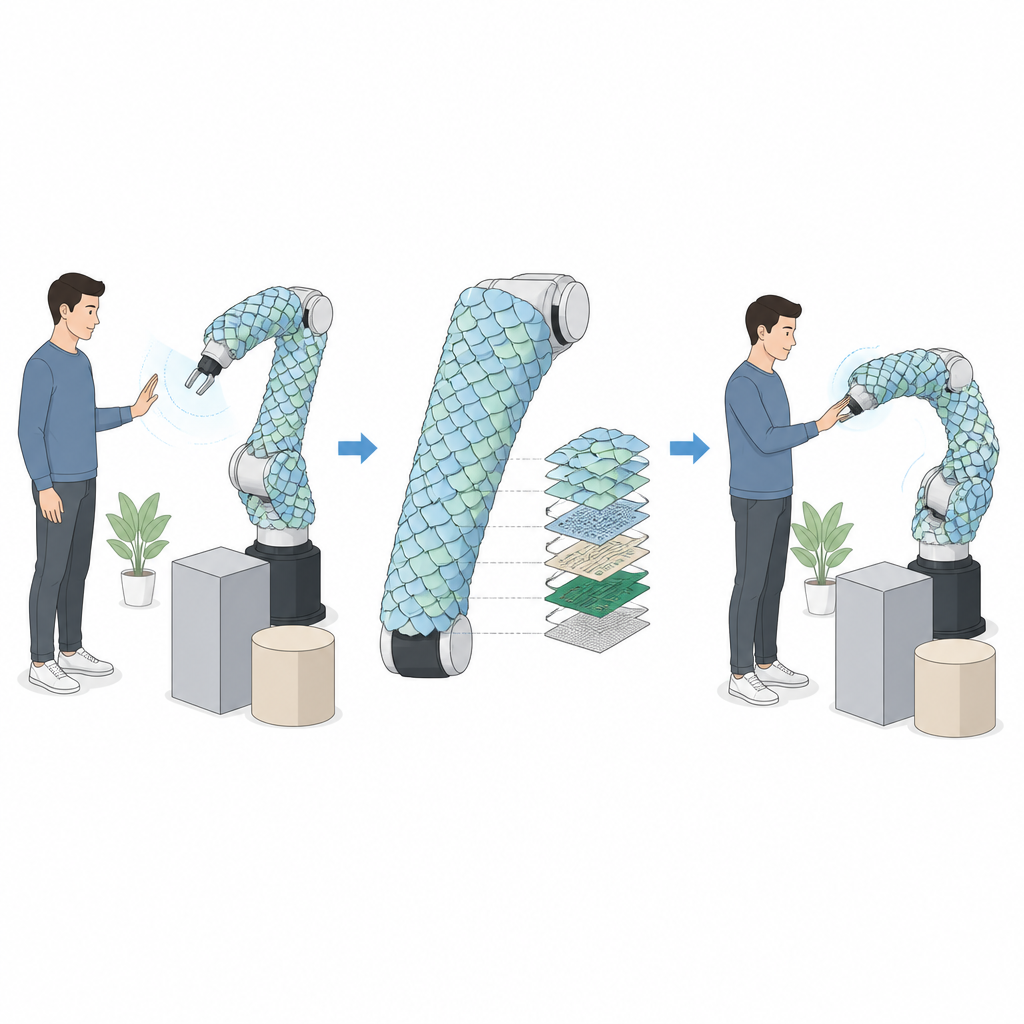
Roboty, które czują i omijają cię
Aby pokazać praktyczne zastosowanie, badacze zamontowali kilka zakrzywionych modułów e-skóry na ramieniu robota. Gdy osoba naciska na ramię, robot porusza się w kierunku pchnięcia lub obraca w odpowiedzi na siły boczne, co sprawia, że sterowanie jest bardziej intuicyjne. Gdy dłoń zbliża się bez kontaktu, warstwa zbliżeniowa ją wykrywa i może spowolnić lub zatrzymać ramię, albo pomóc mu śledzić dłoń w bezpiecznej odległości. System pozwala też robotowi omijać przewodzące przeszkody, zmieniając trajektorię bez zatrzymywania zadania. Razem te możliwości wskazują na roboty, które dzielą przestrzeń z ludźmi bezpieczniej i naturalniej, kierowane skórą, która zarówno wyczuwa kontakt, jak i wykrywa to, co jest w pobliżu.
Cytowanie: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Słowa kluczowe: elektroniczna skóra, czucie dotyku w robotyce, struktury origami, interakcja człowiek‑robot, czujność bliskości