Clear Sky Science · sv
En bioinspirerad origami-kapacitiv robotisk e-hud med multimodala senses
Smart känsel för säkrare robotar
Föreställ dig en robot som kan känna en lätt knackning, upptäcka en närliggande hand innan kontakt och reagera mjukt i stället för att rycka till ett stopp. Den här studien beskriver en ny typ av elektronisk hud som sveper runt maskiner som ett flexibelt skal och ger dem känsel och närhetssinne liknande levande varelser, samtidigt som hårdvaran hålls tunn, robust och praktisk för verklig användning.
Varför robotar behöver bättre hud
När robotar går från fabriker in i hem, sjukhus och delade arbetsplatser måste de hantera nära kontakt med människor. Traditionella beröringssensorer bygger ofta på täta nätverk av små sensorenheter, vilket snabbt blir komplicerat, skrymmande och svårt att koppla upp över stora ytor. Det gör det svårt att täcka en hel robotarm eller kropp med en kontinuerlig, känslig yta. Det nya arbetet tar sig an detta problem genom att skapa en e-hud för stora ytor som behöver betydligt färre sensorkanaler men ändå kan lokalisera var och hur hårt den blir berörd.
Lånat från fiskar och pappersvikning
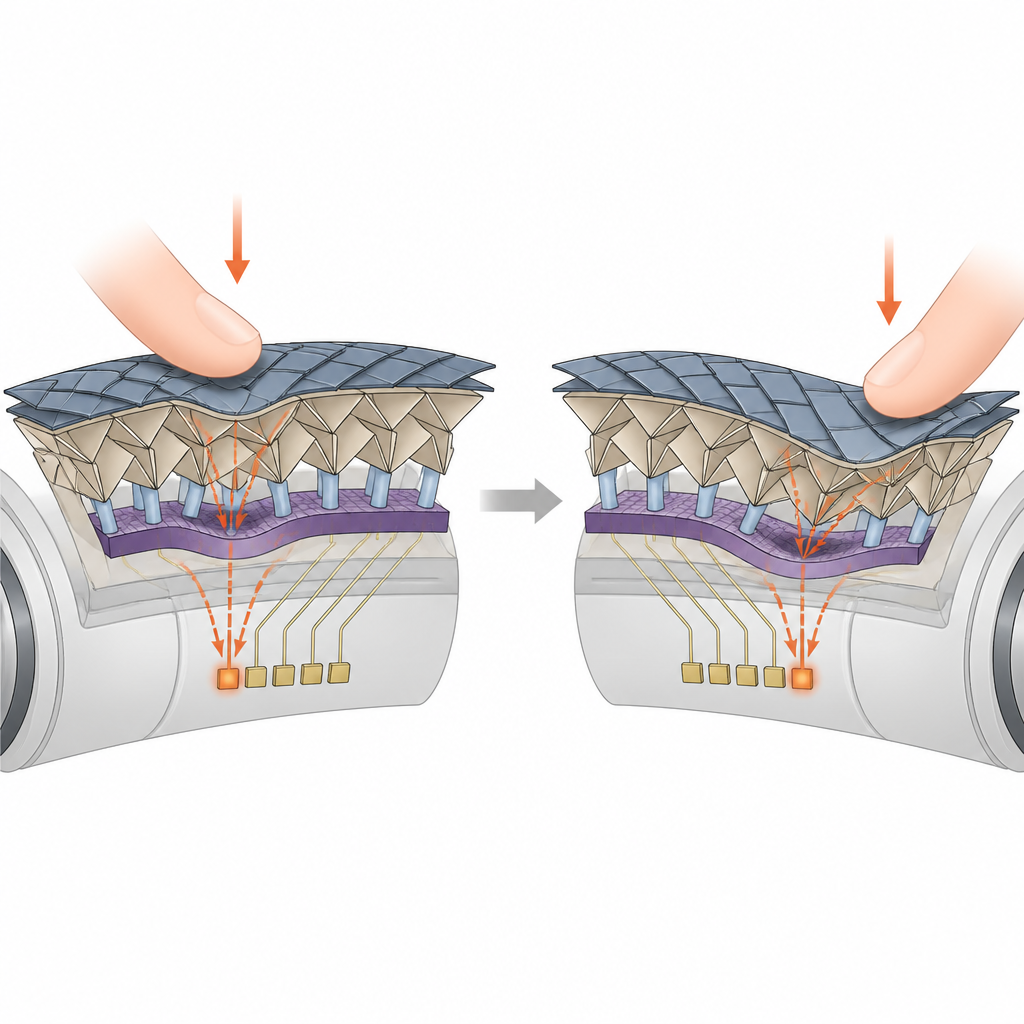
Forskarna hämtade inspiration från fiskhud och origami. Fiskfjäll överlappar för att bilda en flexibel men skyddande yta. Origamimönster tillåter ett plant ark att vikas till komplexa tredimensionella former. Teamet kombinerade dessa idéer i en flerskiktad struktur: mjuka elastomer"fjäll" överst, ett origami-mönstrat kretslager i mitten och stödpelare samt skjuvsensoriska element underst. När tryck trycker på en punkt sprider origami-ramverket den deformationen sidledes över många celler. Genom att mäta små förändringar i elektrisk kapacitans vid ett litet antal elektroder kan systemet härleda beröringens position och styrka över en mycket större yta än konventionella konstruktioner.
Många sinnen i ett tunt lager
Denna e-hud är mer än en enkel tryckplatta. Den separerar tre typer av information: normalt tryck (inåttryck), skjuvkraft (glidning längs ytan) och närhet av ledande objekt såsom en mänsklig hand. Origamiryggskelettet reagerar annorlunda på intryck och glidning, så konstruktörerna kan avläsa normala och skjuvkrafter med minimal störning. En tunn metallbelagd film överst fungerar som närhetssensor och fångar upp förändringar i det elektriska fältet när ett ledande objekt kommer nära, redan innan kontakt. Trots att fem funktionella lager staplas är hela huden bara cirka 9 millimeter tjock, kan tillverkas plan eller kurvad och anpassas efter runda robotarmar.
Skarpare känsel genom data och design
Den mekaniska designen räcker inte ensam för att nå mycket fin beröringsupplösning, så teamet använde maskininlärning. De samlade tusentals datapunkter genom att trycka på huden på olika ställen och med olika krafter, och tränade sedan neurala nätverksmodeller för att kartlägga mönstret av kapacitansförändringar till exakt beröringsposition och kraft. Med detta tillvägagångssätt uppnår huden "superupplösning": den kan lokalisera beröringar mycket mer precist än vad elektrodavståndet antyder, med genomsnittliga positionsfel på endast ett par millimeter och kraftfel på bara några hundradelar av en newton. Genom att skickligt kombinera mätningar från enstaka tryck har de också utökat metoden för att känna igen flera beröringar samtidigt, så länge de berörda punkterna inte ligger omedelbart intill varandra.
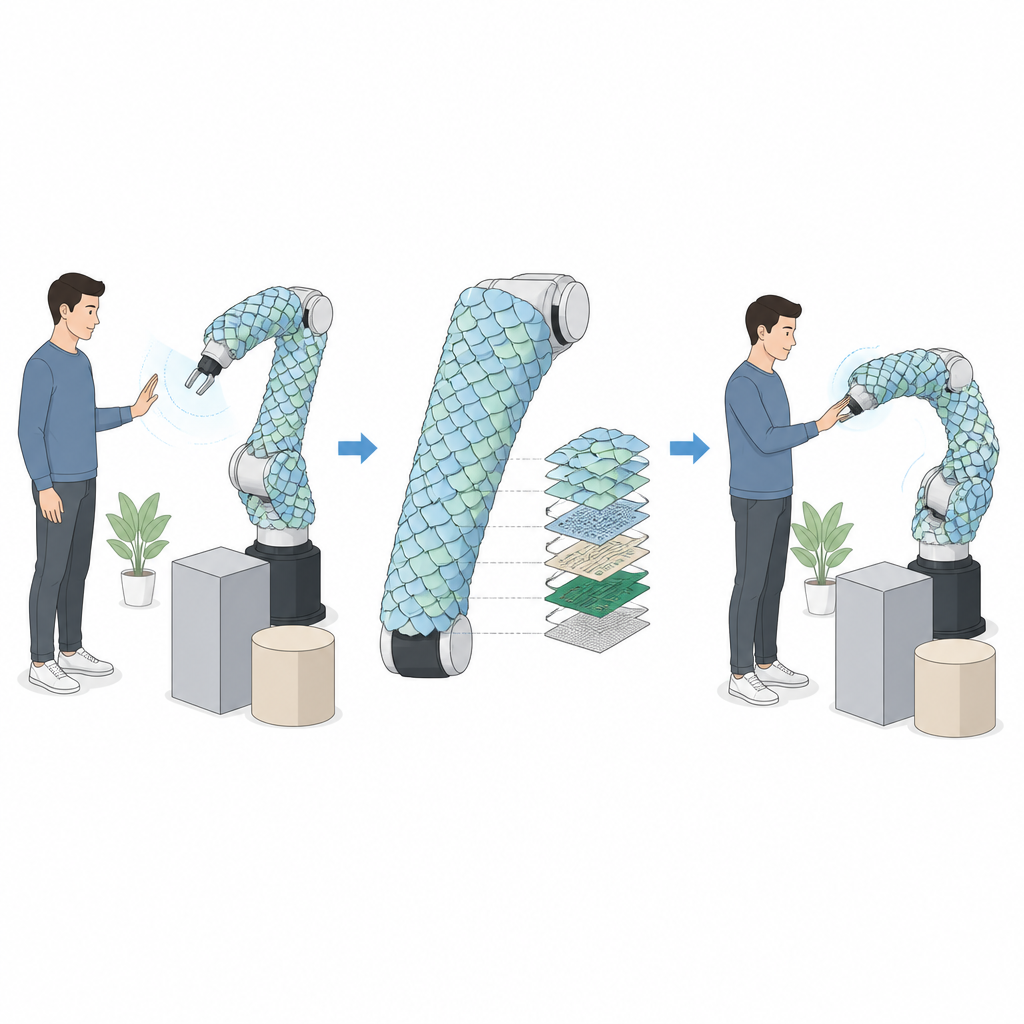
Robotar som känner och undviker dig
För att visa praktisk användning monterade forskarna flera kurvade e-hudmoduler på en robotarm. När en person trycker på armen rör sig roboten i tryckets riktning eller roterar som svar på sidokrafter, vilket gör styrningen mer intuitiv. När en hand närmar sig utan att röra vid armen upptäcker närhetslagret den och kan sakta ner eller stoppa armen, eller hjälpa den att följa handen på ett säkert avstånd. Systemet låter roboten också manövrera runt ledande hinder och ändra sin bana utan att avbryta uppgiften. Tillsammans pekar dessa förmågor mot robotar som delar utrymme med människor på ett säkrare och mer naturligt sätt, styrda av en hud som både känner kontakt och uppfattar vad som finns i närheten.
Citering: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Nyckelord: elektronisk hud, robotisk beröringskänsla, origamistrukturer, människa-robot-interaktion, närhetssensorik