Clear Sky Science · pt
Uma e-pele robótica capacitiva inspirada em origami com capacidades de sensoriamento multimodal
Toque inteligente para robôs mais seguros
Imagine um robô que consegue sentir um toque suave, detectar uma mão próxima antes do contato e reagir de forma suave em vez de parar bruscamente. Este estudo descreve um novo tipo de pele eletrônica que envolve máquinas como uma casca flexível, conferindo-lhes um sentido de toque e proximidade semelhante ao de seres vivos, ao mesmo tempo em que mantém o hardware fino, robusto e prático para uso no mundo real.
Por que os robôs precisam de uma pele melhor
À medida que robôs saem das fábricas e entram em casas, hospitais e locais de trabalho compartilhados, eles precisam lidar com contato próximo com pessoas. Sensores de toque tradicionais geralmente dependem de grades densas de pequenas unidades sensoriais, que rapidamente se tornam complicadas, volumosas e difíceis de cabear em grandes áreas. Isso dificulta cobrir todo um braço ou corpo robótico com uma superfície contínua e sensível. O novo trabalho enfrenta esse problema criando uma “e-pele” de grande área que requer muito menos canais de sensoriamento, mas que ainda assim consegue localizar onde e com que força está sendo tocada.
Pegando ideias de peixes e do origami
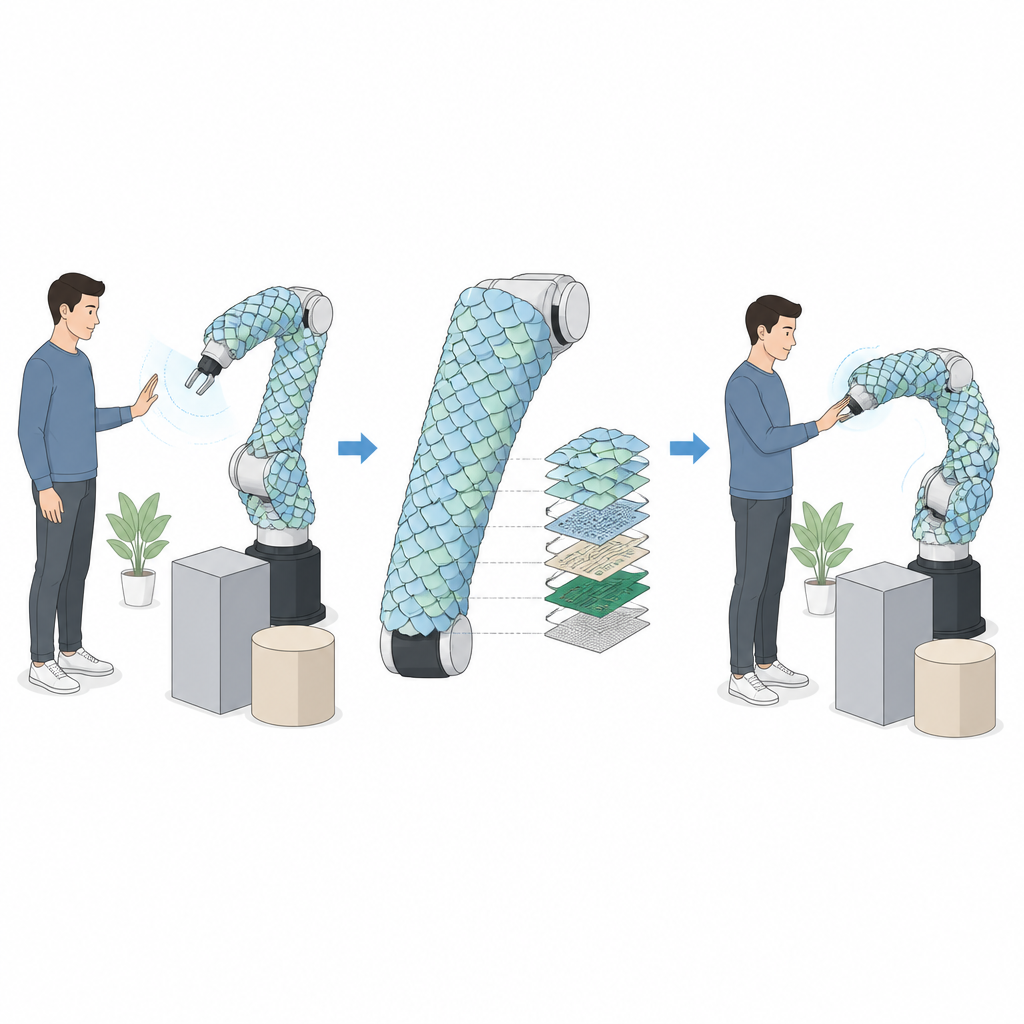
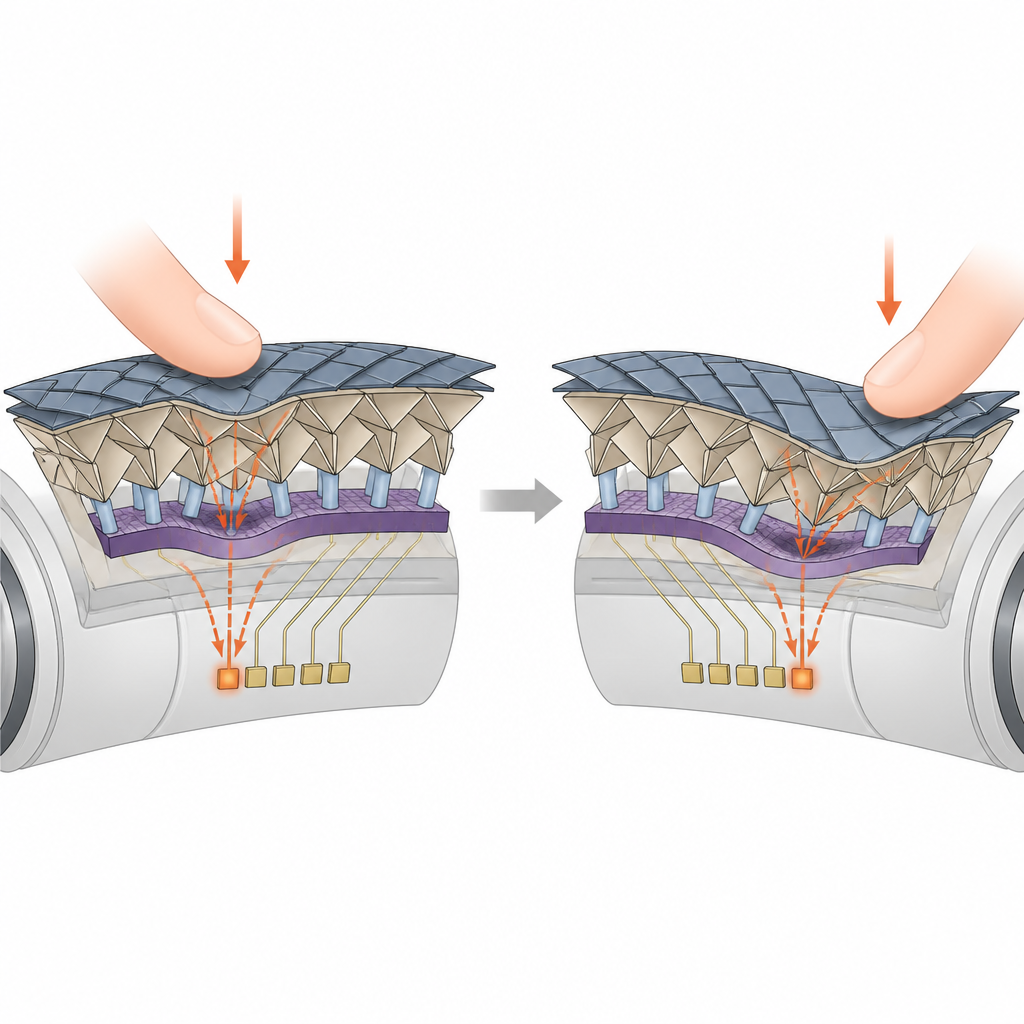
Os pesquisadores buscaram inspiração na pele de peixes e no origami. As escamas dos peixes se sobrepõem para formar uma superfície flexível, porém protetora. Padrões de origami permitem que uma folha plana seja dobrada em formas tridimensionais complexas. A equipe combinou essas ideias em uma estrutura em camadas: “escamas” em elastômero macio na parte superior, uma camada de circuito com padrão em origami no meio, e pilares de suporte e elementos de detecção de cisalhamento por baixo. Quando uma pressão atua em um ponto, a estrutura em origami espalha essa deformação lateralmente por muitas células. Medindo pequenas variações na capacitância elétrica em um pequeno número de eletrodos, o sistema consegue inferir a posição e a intensidade do toque em uma área muito maior do que os projetos convencionais.
Muitos sentidos em uma única camada fina
Esta e-pele é mais do que um simples colchão de pressão. Ela separa três tipos de informação: pressão normal (empurrar para dentro), força de cisalhamento (deslizar) e proximidade de objetos condutores, como a mão humana. A espinha dorsal em origami reage de maneira diferente a pressionamentos e deslizamentos, permitindo que os projetistas obtenham leituras de forças normais e de cisalhamento com interferência mínima. Um filme fino revestido de metal na parte superior atua como sensor de proximidade, captando mudanças no campo elétrico quando um objeto condutor se aproxima, mesmo antes do contato. Apesar de empilhar cinco camadas funcionais, toda a pele tem apenas cerca de 9 milímetros de espessura, pode ser fabricada plana ou curva e se conforma a braços robóticos cilíndricos.
Toque mais preciso por meio de dados e projeto
O projeto mecânico sozinho não é suficiente para alcançar resolução de toque muito fina, então a equipe recorreu ao aprendizado de máquina. Eles coletaram milhares de pontos de dados pressionando a pele em diferentes locais e com várias forças, e então treinaram modelos de rede neural para mapear o padrão de mudanças de capacitância até a localização exata do toque e a força aplicada. Com essa abordagem, a pele atinge uma “super-resolução”: consegue localizar toques muito mais precisamente do que o espaçamento dos eletrodos sugeriria, com erros médios de posição de apenas alguns milímetros e erros de força de apenas algumas centésimos de newton. Combinando inteligentemente medições de toques únicos, eles também estenderam o método para reconhecer múltiplos toques ao mesmo tempo, desde que os pontos tocados não estejam imediatamente adjacentes.
Robôs que sentem e te evitam
Para demonstrar uso prático, os pesquisadores montaram vários módulos curvas de e-pele em um braço robótico. Quando uma pessoa pressiona o braço, o robô se move na direção do empurrão ou gira em resposta a forças laterais, tornando o controle mais intuitivo. Quando uma mão se aproxima sem tocar, a camada de proximidade a detecta e pode reduzir a velocidade ou parar o braço, ou ajudar a rastrear a mão a uma distância segura. O sistema também permite que o robô contorne obstáculos condutores, alterando sua trajetória sem interromper a tarefa. Juntas, essas capacidades apontam para robôs que compartilham o espaço com pessoas de modo mais seguro e natural, guiados por uma pele que tanto sente o contato quanto detecta o que está próximo.
Citação: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Palavras-chave: pele eletrônica, detecção de toque robótico, estruturas em origami, interação humano-robô, sensoriamento de proximidade