Clear Sky Science · it
Una e-pelle robotica capacitiva ispirata alla biologia e all'origami con capacità di sensing multimodale
Tocco intelligente per robot più sicuri
Immaginate un robot che percepisca una leggera toccata, avverta una mano vicina prima del contatto e reagisca in modo fluido invece di bloccarsi bruscamente. Questo studio descrive un nuovo tipo di pelle elettronica che avvolge le macchine come un guscio flessibile, conferendo loro un senso del tatto e della prossimità simile agli organismi viventi, mantenendo l'hardware sottile, robusto e pratico per l'uso nel mondo reale.
Perché i robot hanno bisogno di una pelle migliore
Man mano che i robot escono dalle fabbriche ed entrano in case, ospedali e ambienti di lavoro condivisi, devono gestire il contatto ravvicinato con le persone. I sensori tattili tradizionali spesso si basano su griglie dense di piccole unità sensoriali, che diventano rapidamente complicate, ingombranti e difficili da cablare su grandi superfici. Questo rende difficile coprire un intero braccio o corpo robotico con una superficie continua e sensibile. Il nuovo lavoro affronta questo problema creando una "e-pelle" di ampia area che richiede molti meno canali di sensing ma può comunque localizzare dove e con quale intensità viene toccata.
Pescando ispirazione da pesci e piegature di carta
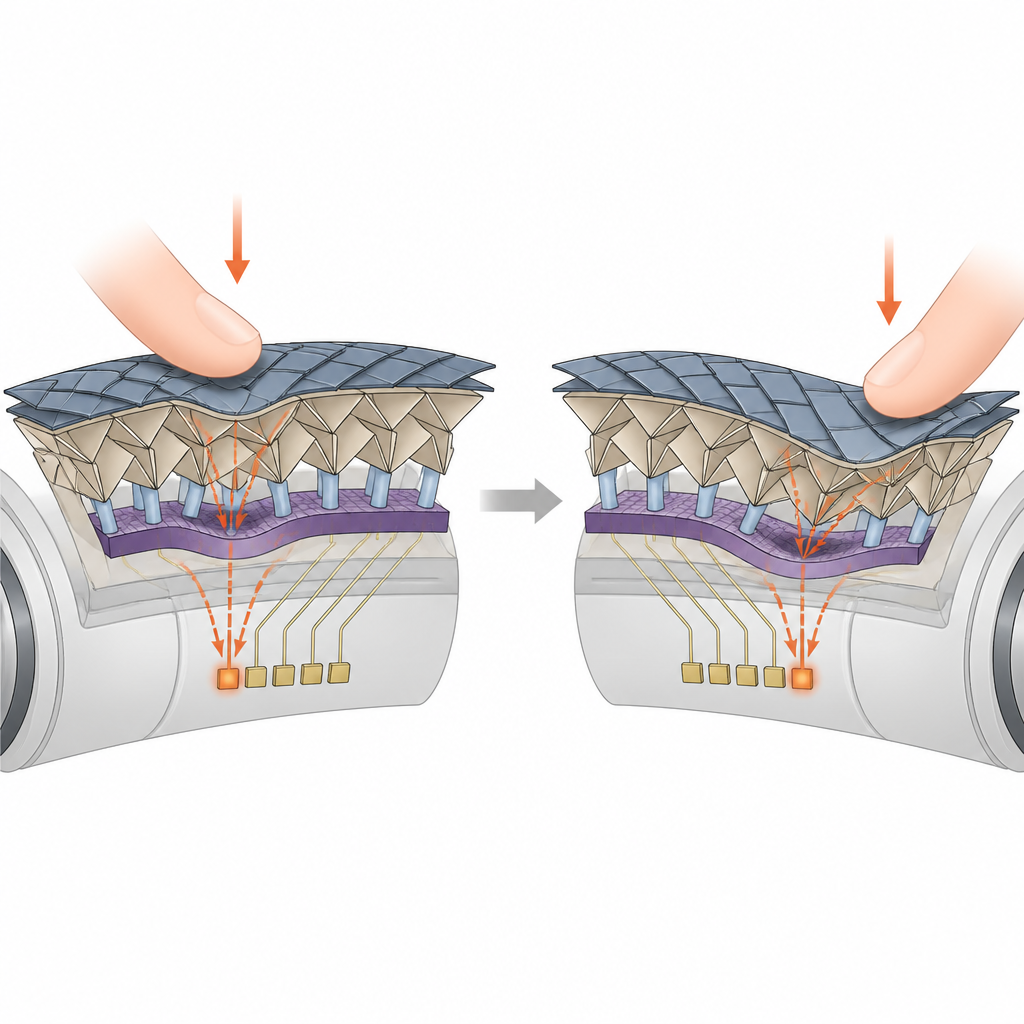
I ricercatori si sono ispirati alla pelle dei pesci e all'origami. Le scaglie dei pesci si sovrappongono per creare una superficie flessibile ma protettiva. I motivi origami permettono a un foglio piatto di ripiegarsi in forme tridimensionali complesse. Il team ha combinato queste idee in una struttura stratificata: "scaglie" in elastomero morbido in cima, uno strato di circuito a motivo origami al centro e pilastri di supporto ed elementi per rilevare lo sforzo di taglio sotto. Quando la pressione agisce su un punto, il telaio origami distribuisce quella deformazione lateralmente attraverso molte celle. Misurando piccole variazioni di capacità elettrica su un numero limitato di elettrodi, il sistema può dedurre posizione e intensità del tocco su un'area molto più ampia rispetto ai design convenzionali.
Molti sensi in un unico strato sottile
Questa e-pelle è più di un semplice pad di pressione. Separa tre tipi di informazione: pressione normale (spinta verso l'interno), forza di taglio (scorrimento laterale) e prossimità di oggetti conduttivi come una mano umana. L'impalcatura origami reagisce diversamente alla pressione e allo scorrimento, così i progettisti possono leggere forze normali e di taglio con interferenze minime. Una sottile pellicola metalizzata in cima funge da sensore di prossimità, captando variazioni nel campo elettrico quando un oggetto conduttivo si avvicina, anche prima del contatto. Nonostante la sovrapposizione di cinque strati funzionali, l'intera pelle rimane di soli circa 9 millimetri di spessore, può essere realizzata piatta o curva e si adatta a bracci robotici tubolari.
Tocco più preciso grazie a dati e design
Il progetto meccanico da solo non è sufficiente per raggiungere una risoluzione tattile molto fine, quindi il team si è rivolto al machine learning. Hanno raccolto migliaia di punti dati premendo la pelle in diverse posizioni e con forze diverse, quindi hanno addestrato modelli di rete neurale per mappare il pattern delle variazioni di capacità alla posizione esatta del tocco e alla forza applicata. Con questo approccio, la pelle ottiene una "super-risolution": può localizzare i tocchi molto più precisamente di quanto suggerirebbe la distanza fra gli elettrodi, con errori medi di posizione di soli pochi millimetri ed errori di forza di poche centesimi di newton. Combinando in modo intelligente le misurazioni di singoli tocchi, hanno esteso il metodo per riconoscere toccate multiple contemporaneamente, purché i punti toccati non siano immediatamente adiacenti.
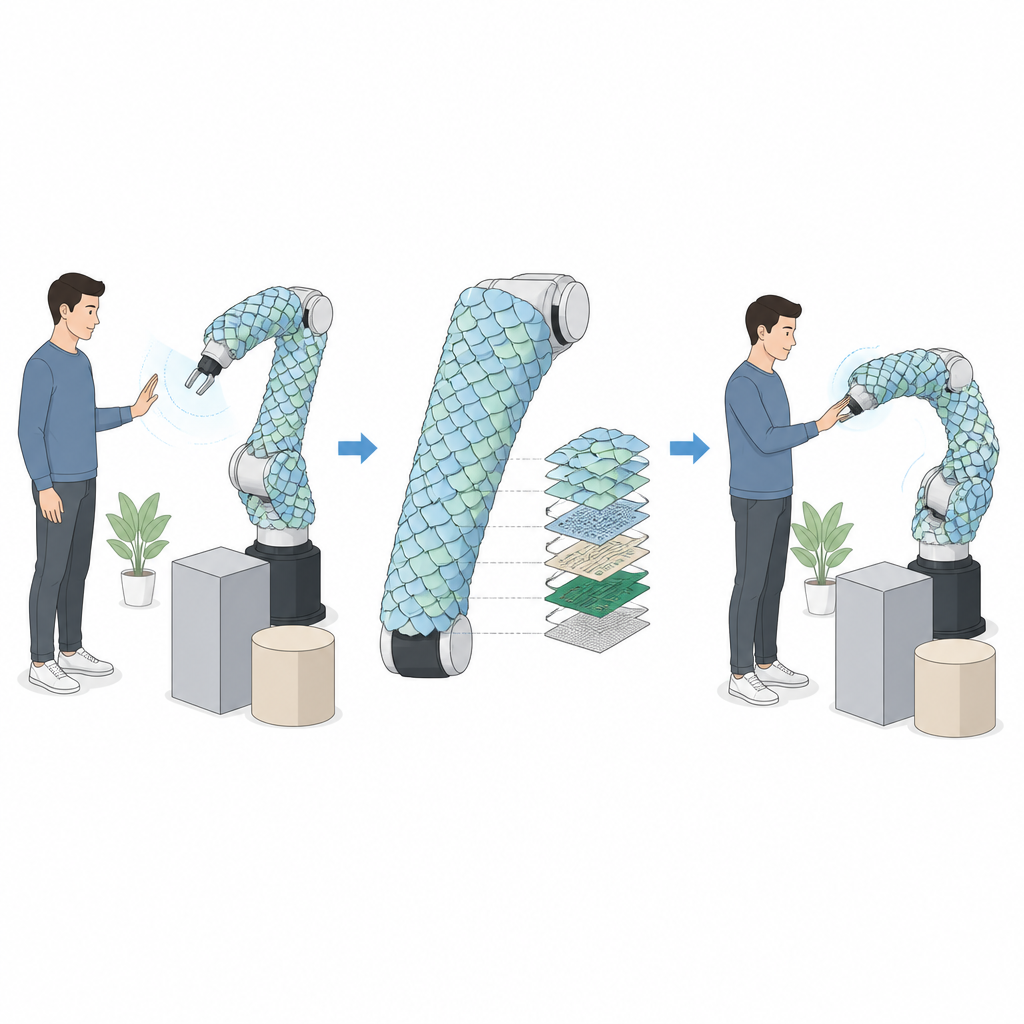
Robot che sentono e ti evitano
Per dimostrare l'uso pratico, i ricercatori hanno montato diversi moduli di e-pelle curvi su un braccio robotico. Quando una persona preme sul braccio, il robot si sposta nella direzione della spinta o ruota in risposta a forze laterali, rendendo il controllo più intuitivo. Quando una mano si avvicina senza toccare, lo strato di prossimità la rileva e può rallentare o fermare il braccio, o aiutare il robot a seguire la mano a una distanza sicura. Il sistema permette inoltre al robot di aggirare ostacoli conduttivi, modificando il percorso senza interrompere il compito. Nel complesso, queste capacità indicano robot che condividono lo spazio con le persone in modo più sicuro e naturale, guidati da una pelle che sente il contatto e percepisce ciò che è nelle vicinanze.
Citazione: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Parole chiave: pelle elettronica, rilevamento del tocco robotico, strutture origami, interazione uomo-robot, rilevamento di prossimità