Clear Sky Science · es
Una piel electrónica robótica capacitiva inspirada en la biología y el origami con capacidades de detección multimodal
Tacto inteligente para robots más seguros
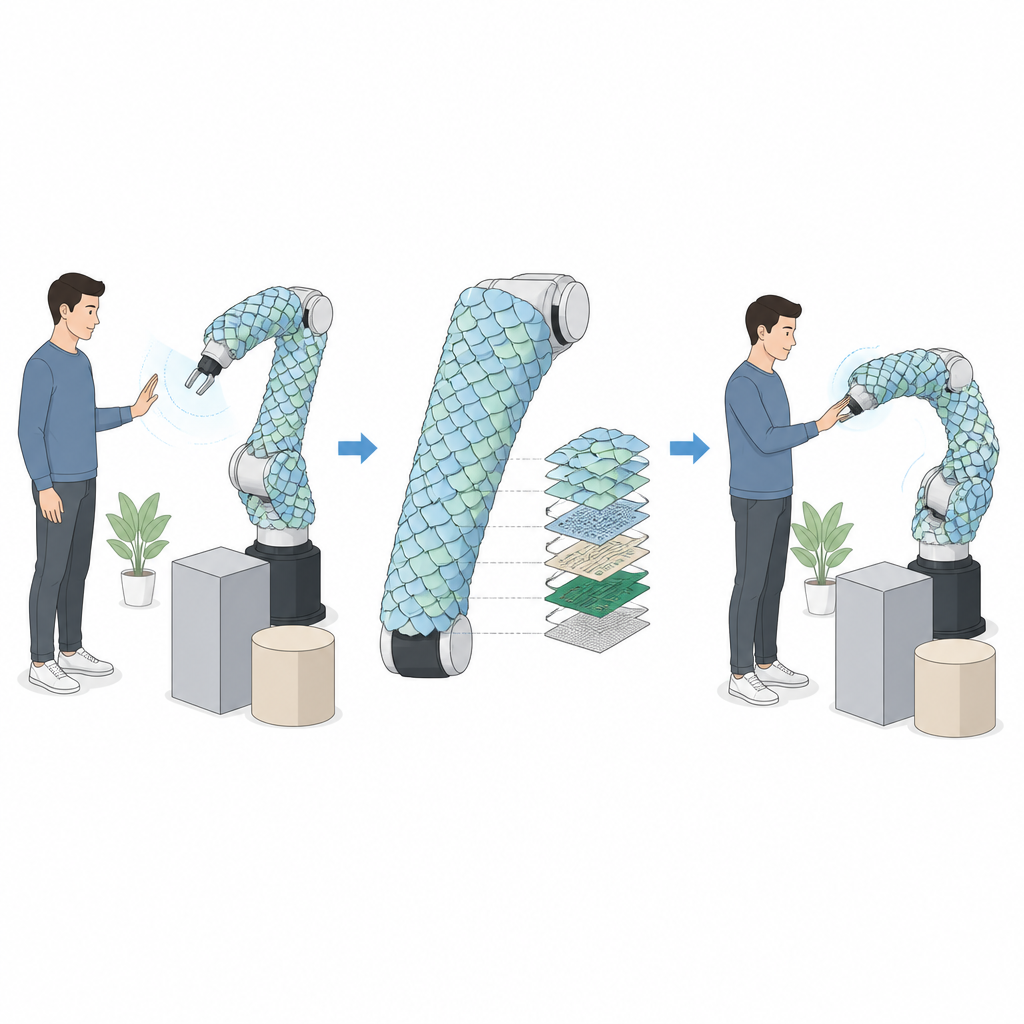
Imagínese un robot que pueda sentir un toque suave, detectar una mano cercana antes del contacto y reaccionar con suavidad en lugar de detenerse bruscamente. Este estudio describe un nuevo tipo de piel electrónica que envuelve a las máquinas como una carcasa flexible, otorgándoles una sensación de tacto y cercanía similar a la de los seres vivos, a la vez que mantiene el hardware delgado, resistente y práctico para uso en el mundo real.
Por qué los robots necesitan mejor piel
A medida que los robots salen de las fábricas y entran en hogares, hospitales y espacios de trabajo compartidos, deben gestionar el contacto cercano con las personas. Los sensores táctiles tradicionales a menudo dependen de mallas densas de pequeñas unidades sensoriales, que se vuelven rápidamente complicadas, voluminosas y difíciles de cablear sobre grandes superficies. Eso complica cubrir todo un brazo o cuerpo robótico con una superficie continua y sensible. El nuevo trabajo aborda este problema creando una “e-piel” de gran superficie que necesita muchos menos canales de detección y, aun así, puede localizar dónde y con qué fuerza se está tocando.
Tomando ideas de peces y del plegado de papel
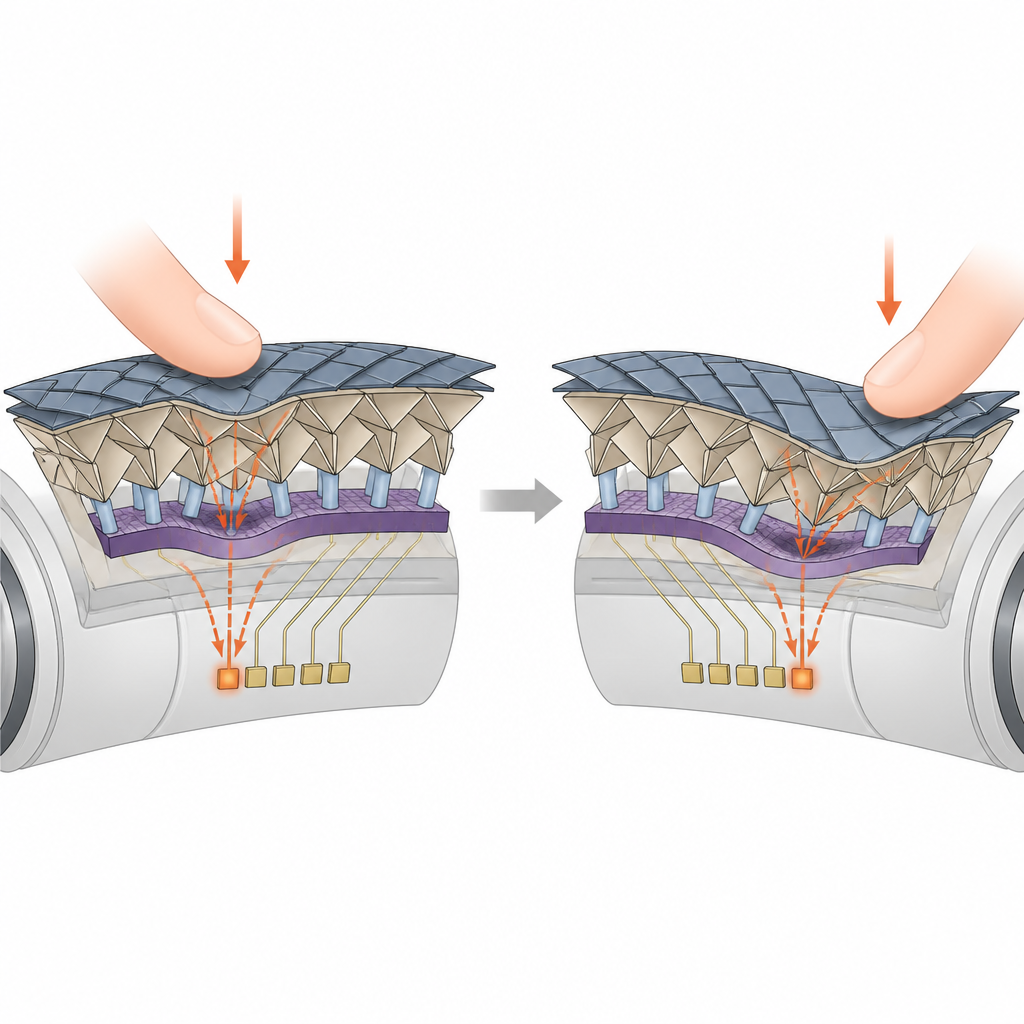
Los investigadores se inspiraron en la piel de los peces y en el origami. Las escamas de los peces se solapan para formar una superficie flexible pero protectora. Los patrones de origami permiten que una lámina plana se pliegue en formas tridimensionales complejas. El equipo combinó estas ideas en una estructura en capas: “escamas” de elastómero blando en la parte superior, una capa de circuito con patrón de origami en el medio, y pilares de soporte y elementos sensores de corte por debajo. Cuando la presión actúa sobre un punto, el armazón origami distribuye esa deformación lateralmente a través de muchas celdas. Midiendo pequeños cambios en la capacitancia eléctrica en un número reducido de electrodos, el sistema puede inferir la posición y la fuerza del toque sobre un área mucho mayor que los diseños convencionales.
Muchos sentidos en una capa delgada
Esta e-piel es más que una simple almohadilla de presión. Separa tres tipos de información: presión normal (empujar hacia dentro), fuerza de corte (deslizamiento) y proximidad de objetos conductores como la mano humana. La columna vertebral origami reacciona de forma distinta al empuje y al deslizamiento, por lo que los diseñadores pueden leer fuerzas normales y de corte con mínima interferencia. Una fina película metalizada en la parte superior actúa como sensor de proximidad, detectando cambios en el campo eléctrico cuando un objeto conductor se acerca, incluso antes del contacto. A pesar de apilar cinco capas funcionales, toda la piel mide alrededor de 9 milímetros de grosor, puede fabricarse plana o curva y se ajusta a brazos robóticos cilíndricos.
Tacto más preciso mediante datos y diseño
El diseño mecánico por sí solo no basta para alcanzar una resolución táctil muy fina, por lo que el equipo recurrió al aprendizaje automático. Recogieron miles de puntos de datos presionando la piel en distintas ubicaciones y con diferentes fuerzas, y luego entrenaron modelos de redes neuronales para mapear el patrón de cambios de capacitancia hasta la ubicación y fuerza exactas del toque. Con este enfoque, la piel consigue una “superresolución”: puede localizar toques con mucha más precisión que el espaciado de los electrodos implicaría, con errores medios de posición de solo unos pocos milímetros y errores de fuerza de apenas unas centésimas de newton. Al combinar inteligentemente mediciones de toques individuales, también extendieron el método para reconocer múltiples toques a la vez, siempre que los puntos tocados no estén inmediatamente adyacentes.
Robots que te sienten y te evitan
Para demostrar un uso práctico, los investigadores montaron varios módulos curvos de e-piel en un brazo robótico. Cuando una persona presiona el brazo, el robot se mueve en la dirección del empuje o rota en respuesta a fuerzas laterales, haciendo el control más intuitivo. Cuando una mano se acerca sin tocar, la capa de proximidad la detecta y puede ralentizar o detener el brazo, o ayudarlo a seguir la mano a una distancia segura. El sistema también permite que el robot sorteé obstáculos conductores, cambiando su trayectoria sin detener su tarea. En conjunto, estas capacidades apuntan a robots que comparten espacio con las personas de forma más segura y natural, guiados por una piel que tanto siente el contacto como detecta lo que hay cerca.
Cita: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Palabras clave: piel electrónica, detección táctil robótica, estructuras de origami, interacción humano-robot, detección de proximidad