Clear Sky Science · nl
Een bio-geïnspireerde origami capacitieve robotische e-huid met multimodale detectiemogelijkheden
Slimme aanraking voor veiligere robots
Stel je een robot voor die een zachte tik kan voelen, een nabijende hand kan waarnemen voordat er contact is, en soepel reageert in plaats van haperend tot stilstand te komen. Deze studie beschrijft een nieuw soort elektronische huid die machines als een flexibele schaal omhult, ze een gevoel voor aanraking en nabijheid geeft vergelijkbaar met levende wezens, terwijl de hardware dun, robuust en praktisch blijft voor gebruik in de echte wereld.
Waarom robots betere huid nodig hebben
Nu robots de fabriek verlaten en huishoudens, ziekenhuizen en gedeelde werkplekken binnendringen, moeten ze omgaan met nauw contact met mensen. Traditionele aanraksensoren vertrouwen vaak op dichte rasters van kleine meetsensoren, die snel ingewikkeld, omvangrijk en lastig te bekabelen worden over grote oppervlakken. Daardoor is het moeilijk om een hele robotarm of -lichaam te bedekken met een doorlopend, gevoelig oppervlak. Het nieuwe werk pakt dit probleem aan door een e-huid voor grote oppervlakken te creëren die veel minder meetkanalen nodig heeft, maar toch kan bepalen waar en hoe hard er wordt aangeraakt.
Ideeën lenen van vissen en papiervouwen
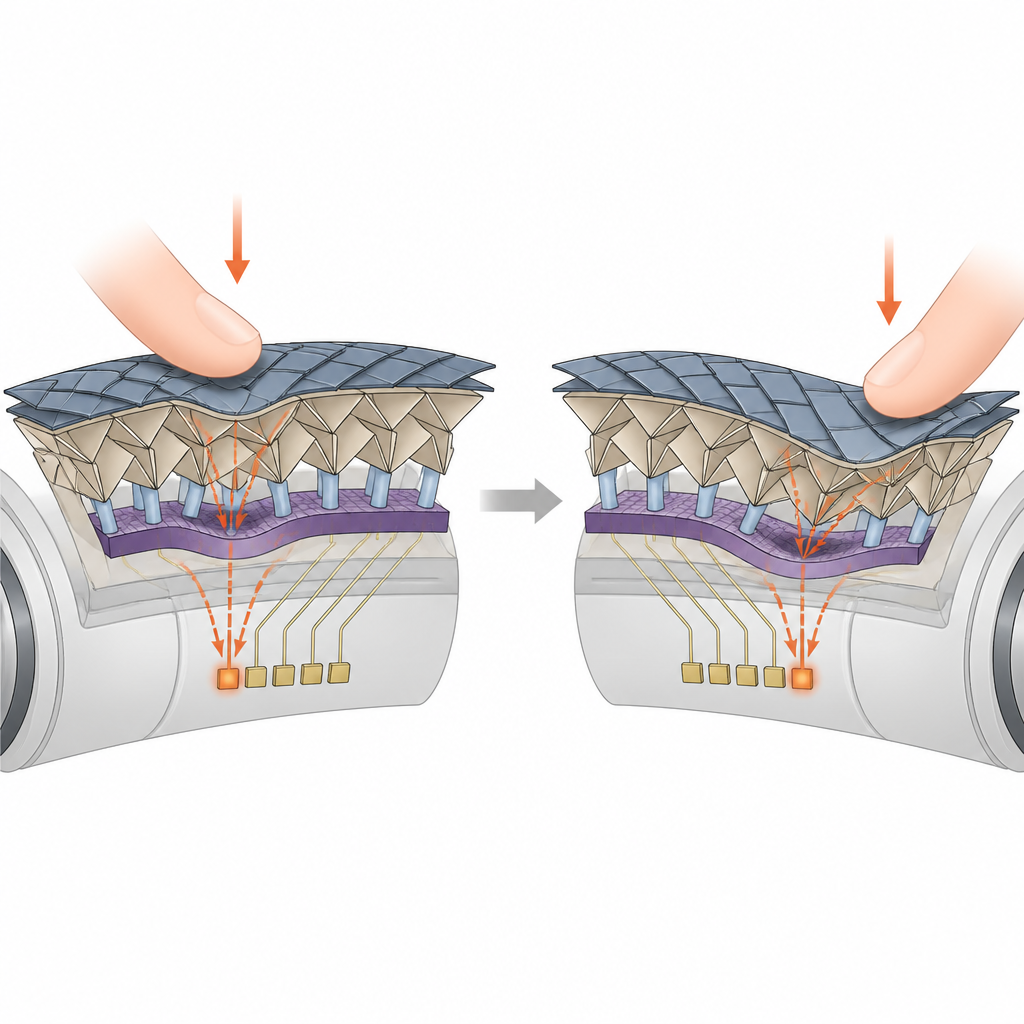
De onderzoekers lieten zich inspireren door vissenhuid en origami. Visschubben overlappen om een flexibel maar beschermend oppervlak te vormen. Origami-patronen maken het mogelijk een vlak vel in complexe driedimensionale vormen te vouwen. Het team combineerde deze ideeën in een gelaagde structuur: zachte elastomeer "schubben" bovenop, een origami-gepatroneerde circuitlaag in het midden, en steunpilaren en schuifkracht-sensoren daaronder. Wanneer druk op één plek wordt uitgeoefend, spreidt het origami-frame die vervorming zijdelings over veel cellen. Door kleine veranderingen in elektrische capaciteit op een klein aantal elektroden te meten, kan het systeem de positie en de sterkte van de aanraking afleiden over een veel groter gebied dan conventionele ontwerpen.
Veel zintuigen in één dunne laag
Deze e-huid is meer dan een eenvoudig druksensorvlak. Hij scheidt drie soorten informatie: normale druk (indrukken), schuifkracht (wegschuiven) en de nabijheid van geleidende objecten zoals een menselijke hand. De origami-ruggengraat reageert verschillend op indrukken en verschuiven, zodat de ontwerpers normale en schuifkrachten kunnen uitlezen met minimale interferentie. Een dun metaalgecoate film bovenop fungeert als nabijheidssensor, die veranderingen in het elektrische veld oppikt wanneer een geleidend object dichterbij komt, zelfs voor er contact is. Ondanks dat er vijf functionele lagen zijn gestapeld, blijft de hele huid slechts ongeveer 9 millimeter dik, kan zowel vlak als gebogen worden gemaakt en sluit aan op ronde robotarmen.
Fijnere aanraking door data en ontwerp
Het mechanische ontwerp alleen is niet voldoende om zeer fijne aanrakingsresolutie te bereiken, dus wendde het team zich tot machine learning. Ze verzamelden duizenden gegevenspunten door de huid op verschillende plekken en met verschillende krachten in te drukken, en trainden vervolgens neurale netwerkmodellen om het patroon van capaciteitveranderingen te koppelen aan de exacte aanrakingslocatie en -kracht. Met deze aanpak bereikt de huid "superresolutie": hij kan aanrakingen veel nauwkeuriger lokaliseren dan de afstand tussen de elektroden zou doen vermoeden, met gemiddelde positiefouten van slechts enkele millimeters en krachtfouten van slechts enkele honderdsten van een newton. Door op slimme wijze metingen van enkele aanrakingen te combineren, breidden ze de methode ook uit om meerdere gelijktijdige aanrakingen te herkennen, zolang de aangeraakte plekken niet direct naast elkaar liggen.
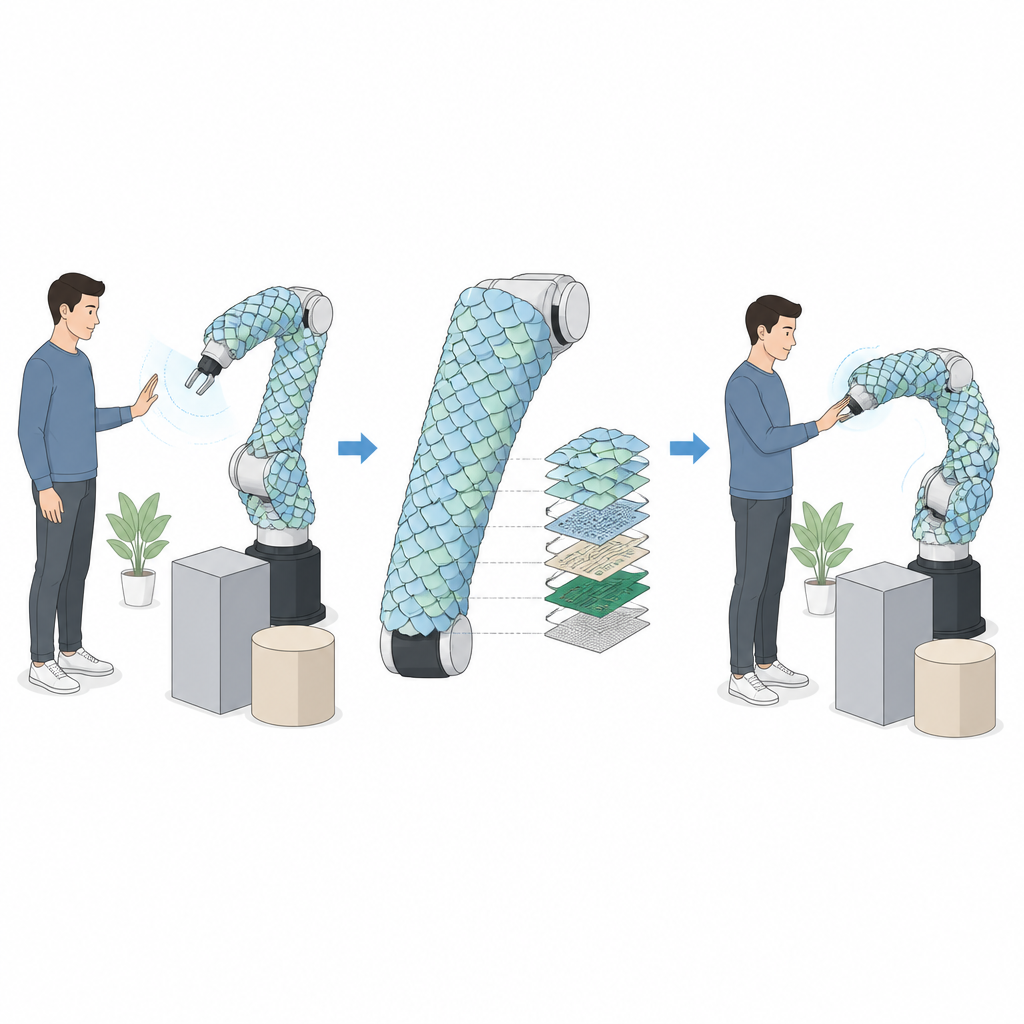
Robots die je voelen en ontwijken
Om praktisch nut te tonen, monteerden de onderzoekers meerdere gebogen e-huidmodules op een robotarm. Wanneer een persoon op de arm drukt, beweegt de robot in de richting van de duw of draait als reactie op zijwaartse krachten, wat de besturing intuïtiever maakt. Wanneer een hand nadert zonder te raken, detecteert de nabijheidslaag dit en kan de arm vertragen of stoppen, of de hand op veilige afstand volgen. Het systeem laat de robot ook om geleidende obstakels heen sturen, waarbij het pad wordt aangepast zonder de taak te onderbreken. Gezamenlijk wijzen deze mogelijkheden op robots die ruimte met mensen delen op een veiligere en natuurlijkere manier, geleid door een huid die zowel contact voelt als waarneemt wat er dichtbij is.
Bronvermelding: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Trefwoorden: elektronische huid, robotische aanrakingdetectie, origami-structuren, mens-robot interactie, nabijheidsdetectie