Clear Sky Science · ru
Био-вдохновлённая оригами-ёмкостная электронная кожа для роботов с многомодовым восприятием
Умное прикосновение для более безопасных роботов
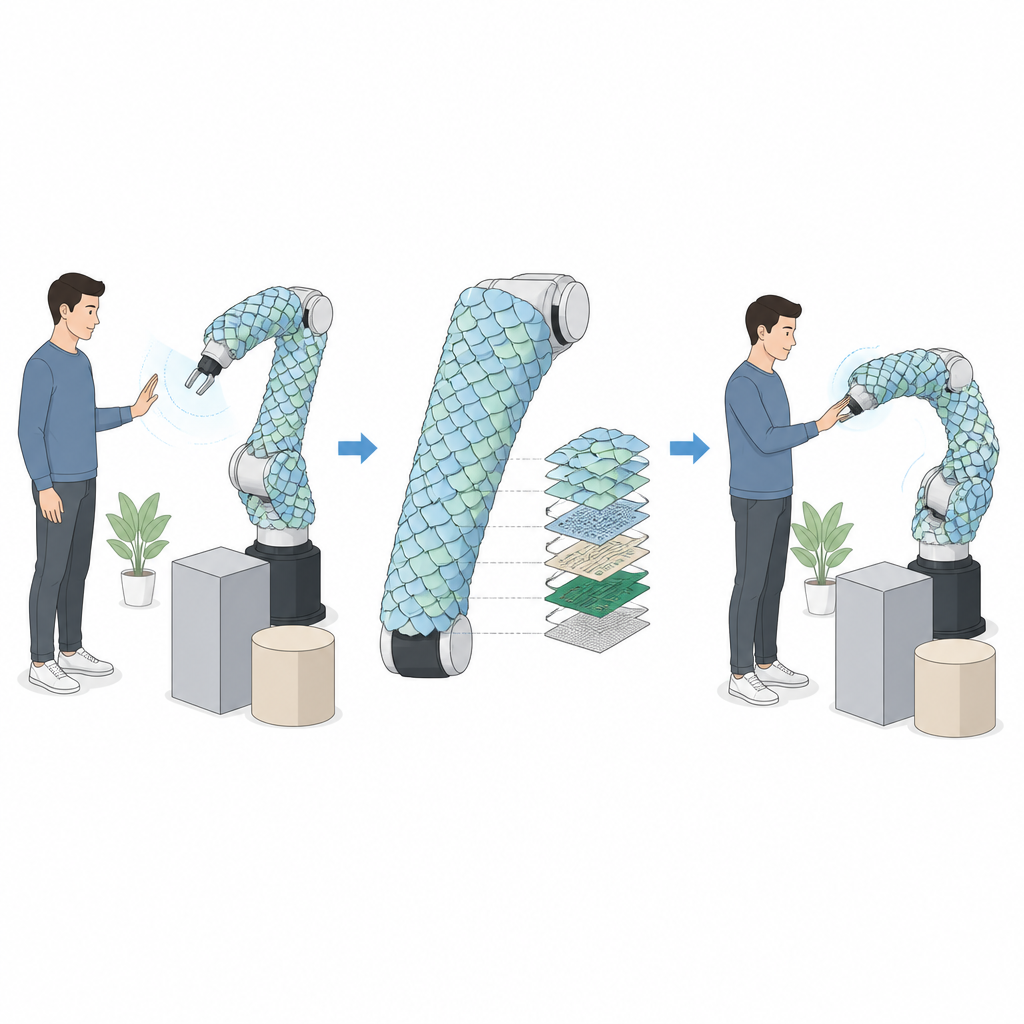
Представьте робота, который ощущает лёгкое прикосновение, замечает приближающуюся руку до контакта и реагирует плавно, а не резким остановом. В этом исследовании описана новая электронная кожа, оборачивающая машины как гибкая оболочка и дающая им чувство прикосновения и близости, похожее на живые существа, при этом оставаясь тонкой, прочной и пригодной для реального использования.
Почему роботам нужна лучшая кожа
По мере того как роботы выходят из фабрик в дома, больницы и общие рабочие пространства, им приходится иметь тесный контакт с людьми. Традиционные сенсоры прикосновения часто опираются на плотные сетки мелких элементов, что быстро усложняет систему, делает её громоздкой и трудной в электропроводке на больших площадях. Это затрудняет покрытие всей руки или корпуса робота непрерывной чувствительной поверхностью. Новая работа решает эту проблему, создав «е-кожу» большой площади, требующую гораздо меньше каналов сенсинга, но всё ещё способную точно определять место и силу прикосновения.
Заимствование идей у рыб и искусство складывания бумаги
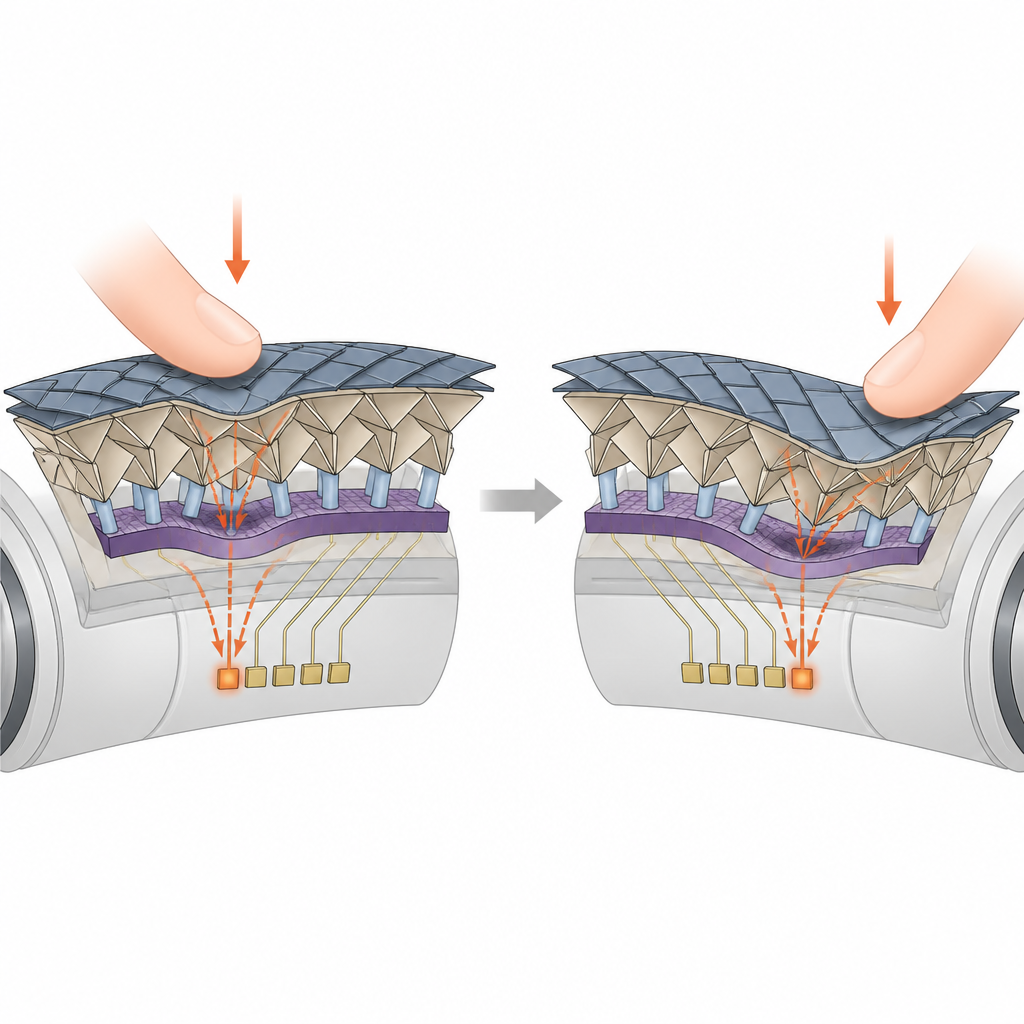
Исследователи обратились к рыбьей коже и оригами за вдохновением. Рыбьи чешуи перекрывают друг друга, образуя гибкую, но защитную поверхность. Оригами-паттерны позволяют плоскому листу складываться в сложные трёхмерные формы. Команда объединила эти идеи в многослойную структуру: сверху — мягкие эластомерные «чешуйки», в середине — слой с платой по мотивам оригами, а снизу — опорные столбики и элементы для измерения сдвига. Когда в одну точку прикладывается давление, оригами-каркас распределяет деформацию по бокам через множество ячеек. Измеряя крошечные изменения ёмкости на небольшом числе электродов, система может выводить положение и силу прикосновения на площади, гораздо большей, чем у традиционных конструкций.
Множество ощущений в одном тонком слое
Эта е-кожа — не просто простая площадка для давления. Она разделяет три типа информации: нормальное давление (вдавливание), сила сдвига (скольжение) и близость проводящих объектов, например человеческой руки. Оригами-каркас реагирует по-разному на нажатие и сдвиг, поэтому разработчики могут считывать нормальные и касательные силы с минимальными помехами. Тонкая металлизированная плёнка сверху служит датчиком близости, фиксируя изменения электрического поля, когда проводящий объект приближается, ещё до контакта. Несмотря на пять функциональных слоёв, общая толщина кожи составляет около 9 миллиметров, её можно сделать плоской или изогнутой, и она хорошо облегает округлые роботизированные руки.
Более точное ощущение благодаря данным и дизайну
Только механического дизайна недостаточно для очень высокой разрешающей способности прикосновения, поэтому команда прибегла к машинному обучению. Они собрали тысячи точек данных, нажимая кожу в разных местах и с разной силой, а затем обучили нейронные сети сопоставлять паттерны изменения ёмкости с точным положением и силой прикосновения. С таким подходом кожа достигает «супер-разрешения»: она локализует прикосновения гораздо точнее, чем это предсказывает шаг электродов, с средними ошибками позиции всего в несколько миллиметров и ошибками силы в сотые доли ньютона. Комбинируя измерения одиночных прикосновений, они также расширили методику на распознавание нескольких одновременных прикосновений, при условии что точки касания не лежат непосредственно рядом.
Роботы, которые чувствуют и избегают вас
Для демонстрации практичности исследователи установили несколько изогнутых модулей е-кожи на роботизированную руку. Когда человек давит на руку, робот перемещается в направлении нажатия или поворачивается в ответ на боковые силы, делая управление более интуитивным. Если рука приближается без касания, слой близости фиксирует её и может замедлить или остановить руку, либо помочь отслеживать руку на безопасном расстоянии. Система также позволяет роботу объезжать проводящие препятствия, меняя траекторию, не останавливаясь в выполнении задачи. В совокупности эти возможности указывают на роботов, которые безопаснее и естественнее разделяют пространство с людьми, руководствуясь кожей, которая и чувствует контакт, и улавливает объекты поблизости.
Цитирование: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Ключевые слова: электронная кожа, сенсорика прикосновения для роботов, структуры оригами, взаимодействие человека и робота, сенсорика близости