Clear Sky Science · de
Eine bioinspirierte Origami-kapazitive robotische E-Haut mit multimodalen Sensorfähigkeiten
Intelligente Berührung für sicherere Roboter
Stellen Sie sich einen Roboter vor, der ein sanftes Klopfen spüren, eine nahe Hand vor dem Kontakt wahrnehmen und ruhig reagieren kann, statt ruckartig stehenzubleiben. Diese Studie beschreibt eine neue Art von Elektronikhaut, die sich wie eine flexible Hülle um Maschinen legt und ihnen ein Berührungs- und Näheempfinden ähnlich dem lebender Organismen verleiht, dabei aber dünn, robust und alltagstauglich bleibt.
Warum Roboter bessere Haut brauchen
Da Roboter außerhalb von Fabriken in Wohnungen, Krankenhäuser und gemeinsam genutzte Arbeitsplätze vordringen, müssen sie engen Kontakt mit Menschen bewältigen. Herkömmliche Berührungssensoren basieren oft auf dichten Gittern winziger Sensorelemente, die schnell kompliziert, sperrig und schwer über große Flächen zu verdrahten sind. Das erschwert es, einen ganzen Roboterarm oder -körper mit einer durchgehenden, empfindlichen Oberfläche zu bedecken. Die neue Arbeit geht dieses Problem an, indem sie eine großflächige „E-Haut“ schafft, die weit weniger Sensorkanäle benötigt und dennoch bestimmen kann, wo und wie stark gedrückt wird.
Ideen von Fischen und Papierfalten leihen
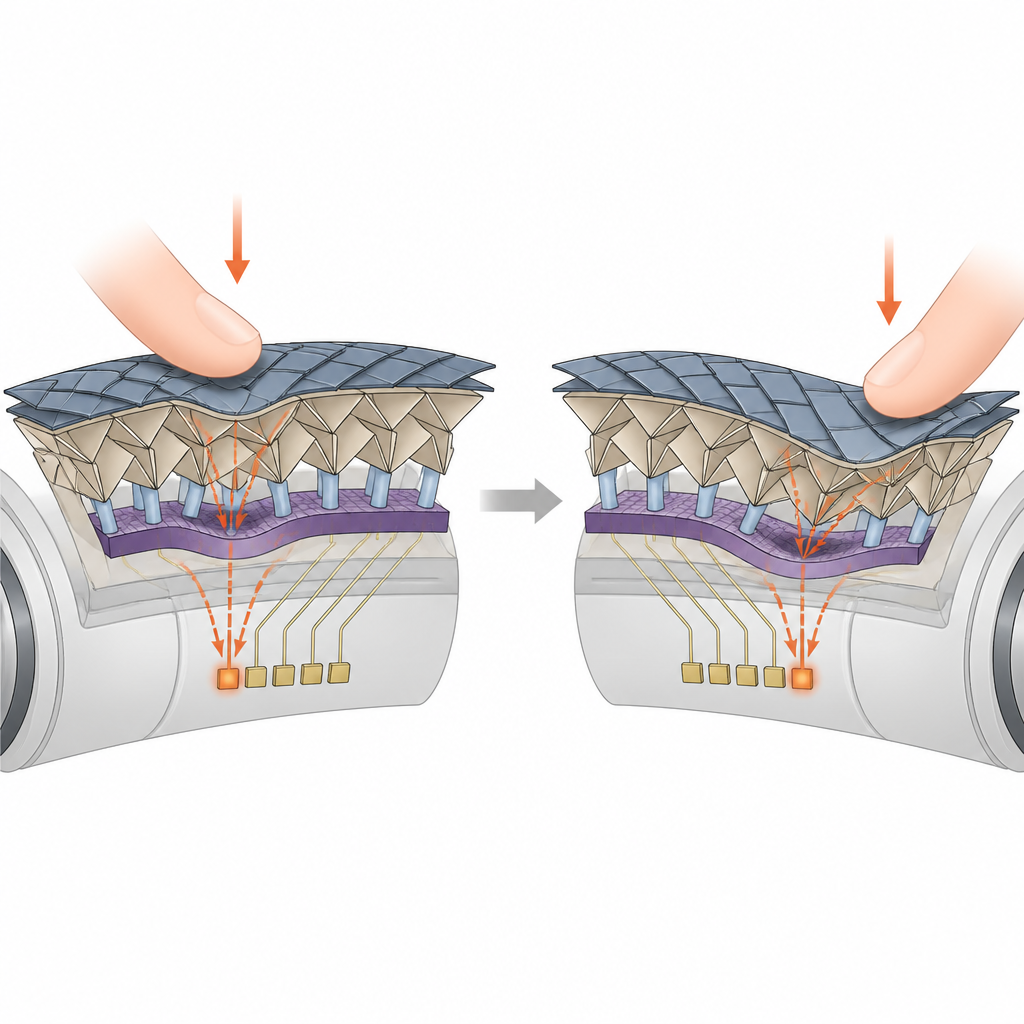
Die Forschenden ließen sich von Fischhaut und Origami inspirieren. Fischschuppen überlappen und bilden eine flexible, aber schützende Oberfläche. Origami-Muster ermöglichen es, ein flaches Blatt in komplexe dreidimensionale Formen zu falten. Das Team kombinierte diese Konzepte zu einer geschichteten Struktur: weiche Elastomer-„Schuppen“ oben, eine origami-geprägte Leiterbahnschicht in der Mitte und Stützsäulen sowie Scher-Sensorelemente darunter. Wenn Druck an einer Stelle wirkt, verteilt das Origami-Gerüst diese Verformung seitlich über viele Zellen. Durch das Messen winziger Änderungen der elektrischen Kapazität an einer kleinen Anzahl von Elektroden kann das System Ort und Intensität der Berührung über eine viel größere Fläche erschließen als herkömmliche Designs.
Viele Sinne in einer dünnen Schicht
Diese E-Haut ist mehr als ein einfacher Drucksensor. Sie trennt drei Informationsarten: Normaldruck (Einpressen), Scherkraft (Gleiten) und die Nähe leitfähiger Objekte wie einer menschlichen Hand. Das Origami-Rückgrat reagiert unterschiedlich auf Drücken und Gleiten, sodass die Entwickler Normal- und Scherkräfte mit minimaler gegenseitiger Störung auslesen können. Eine dünne metallbeschichtete Folie oben dient als Proximitätssensor und erfasst Änderungen im elektrischen Feld, wenn sich ein leitfähiges Objekt nähert – noch bevor es Kontakt gibt. Trotz fünf funktionaler Schichten bleibt die gesamte Haut nur etwa 9 Millimeter dick, lässt sich flach oder gekrümmt herstellen und passt sich runden Roboterarmen an.
Scharfere Berührung durch Daten und Design
Das mechanische Design allein reicht nicht aus, um sehr feine Berührungsauflösung zu erreichen, daher wandte sich das Team dem maschinellen Lernen zu. Sie sammelten Tausende Datenpunkte, indem sie die Haut an verschiedenen Stellen und mit unterschiedlichen Kräften drückten, und trainierten dann neuronale Netzmodelle, die das Muster der Kapazitätsänderungen auf den genauen Berührungsort und die Kraft abbilden. Mit diesem Ansatz erzielt die Haut „Super-Auflösung“: Sie kann Berührungen deutlich präziser lokalisieren, als der Elektrodenabstand vermuten ließe, mit mittleren Ortsfehlern von nur wenigen Millimetern und Kraftfehlern von nur wenigen Hundertsteln Newton. Durch geschickte Kombination von Einzelberührungsmessungen erweiterten sie die Methode auch auf die Erkennung mehrerer gleichzeitiger Berührungen, solange die berührten Stellen nicht unmittelbar nebeneinanderliegen.
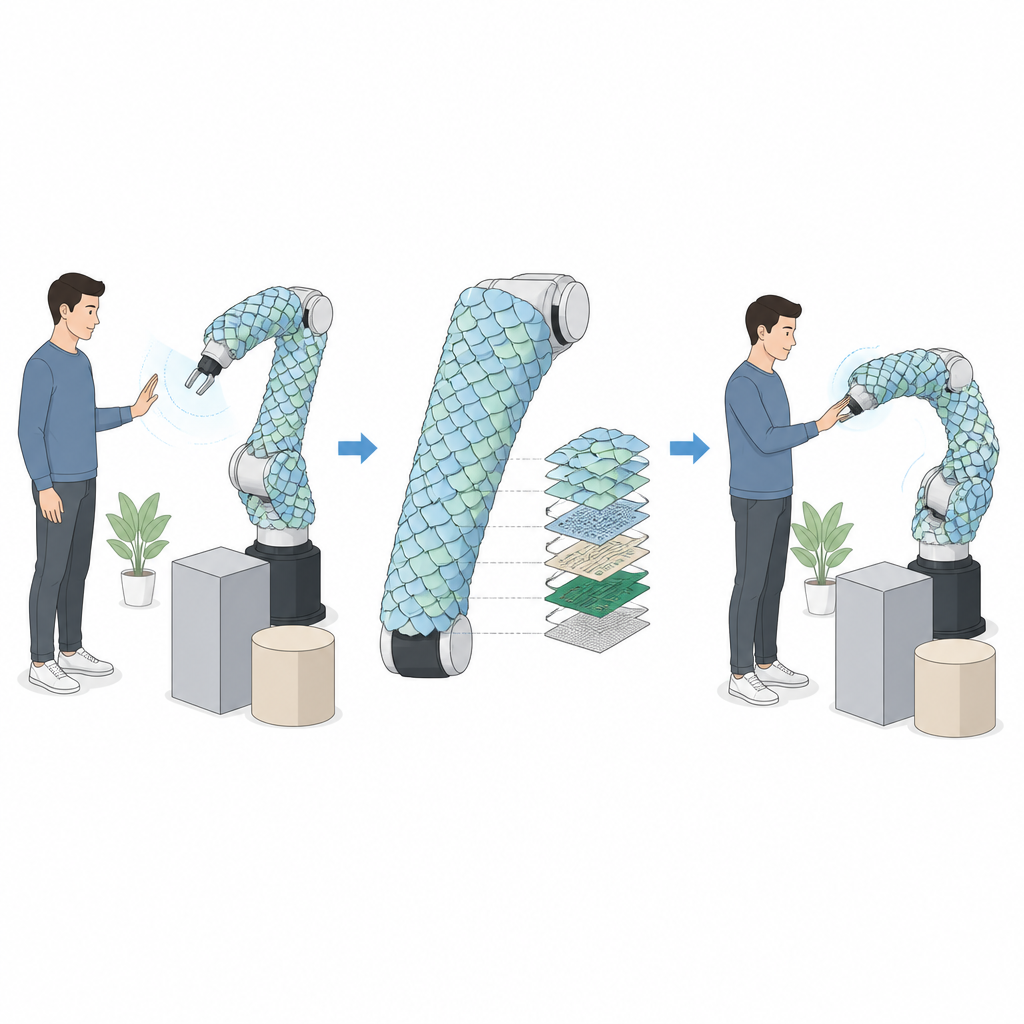
Roboter, die fühlen und ausweichen
Um die praktische Anwendung zu demonstrieren, brachten die Forschenden mehrere gebogene E-Haut-Module an einem Roboterarm an. Drückt eine Person auf den Arm, bewegt sich der Roboter in Richtung des Schubs oder dreht sich als Reaktion auf seitliche Kräfte – das macht die Steuerung intuitiver. Nähert sich eine Hand, ohne zu berühren, erkennt die Proximitätsschicht sie und kann den Arm verlangsamen oder anhalten oder ihn dabei unterstützen, die Hand in sicherer Entfernung zu verfolgen. Das System ermöglicht dem Roboter außerdem, leitfähigen Hindernissen auszuweichen und dabei seine Aufgabe fortzusetzen. Zusammengenommen deuten diese Fähigkeiten auf Roboter hin, die Räume mit Menschen sicherer und natürlicher teilen, geleitet von einer Haut, die sowohl Kontakt fühlt als auch das Nahe erkennt.
Zitation: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Schlüsselwörter: elektronische Haut, robotische Berührungssensorik, Origami-Strukturen, Mensch-Roboter-Interaktion, Proximitätssensorik