Clear Sky Science · tr
Biyo-ilhamlı origami kapasitif robotik elektronik deri, çoklu modlu algılama yetenekleri
Güvenli robotlar için akıllı dokunma
Hafif bir dokunuşu hissedebilen, temas olmadan önce yakındaki eli algılayabilen ve ani duruşlar yerine akıcı tepkiler verebilen bir robotu hayal edin. Bu çalışmada, makineleri esnek bir kabuk gibi saran ve onlara canlılarda olduğu gibi dokunma ve yakınlık hissi kazandıran, donanımı ince, dayanıklı ve gerçek dünya kullanımı için pratik tutan yeni bir elektronik deri tanımlanıyor.
Neden robotların daha iyi bir deriye ihtiyacı var
Robotlar fabrikalardan çıkarak evlere, hastanelere ve ortak çalışma alanlarına girdikçe, insanlarla yakın temasla başa çıkmaları gerekiyor. Geleneksel dokunma sensörleri genellikle yoğun küçük algılama birimlerinden oluşan ızgaralara dayanır; bu da büyük alanlarda hızla karmaşık, hantal ve kablajı zor hale getirir. Bu, bir robot kolunu veya gövdesini sürekli, hassas bir yüzeyle kaplamayı zorlaştırır. Yeni çalışma, çok daha az algılama kanalı gerektiren ancak yine de nereden ve ne kadar sert dokunulduğunu belirleyebilen büyük alanlı bir “e-deri” yaratarak bu sorunu ele alıyor.
Balıklardan ve kağıt katlamadan ödünç alınan fikirler
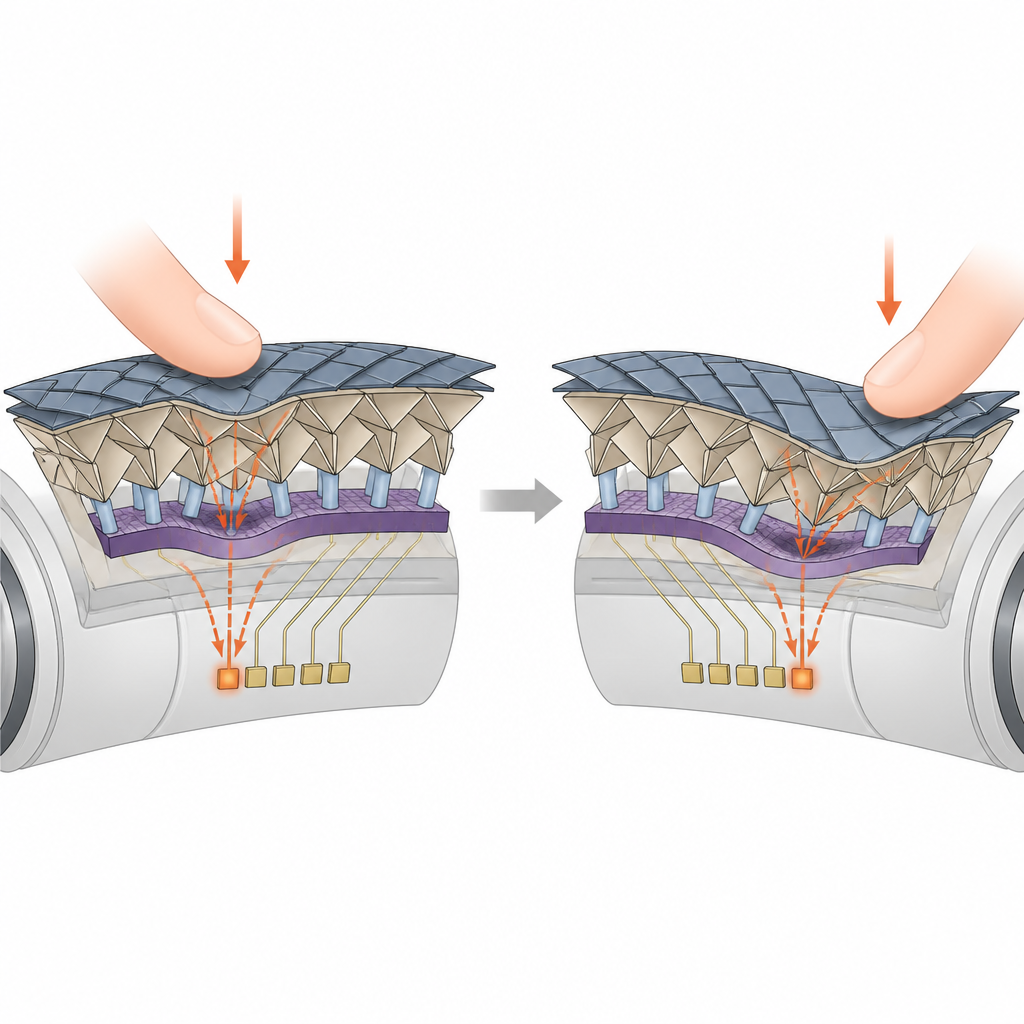
Araştırmacılar ilham için balık derisini ve origamiyi incelediler. Balık pulları esnek ama koruyucu bir yüzey oluşturacak şekilde üst üste biner. Origami desenleri, düz bir levhayı karmaşık üç boyutlu şekillere katlamayı sağlar. Ekip bu fikirleri katmanlı bir yapıda birleştirdi: üstte yumuşak elastomer “pul”lar, ortada origami desenli bir devre katmanı ve altında destek sütunları ile kayma algılama elemanları. Basınç bir noktaya uygulandığında, origami iskeleti bu deformasyonu birçok hücreye yana doğru yayar. Az sayıda elektrottaki küçük elektriksel kapasitans değişimlerini ölçerek, sistem geleneksel tasarımlardan çok daha geniş bir alanda dokunuşun konumunu ve şiddetini çıkarabilir.
Tek ince katmanda birden çok duygu
Bu e-deri basit bir basınç pedi olmanın ötesinde işlev görür. Normal basınç (içe doğru basma), kayma kuvveti (yüzey üzerinde kayma) ve iletken nesnelerin (ör. insan eli) yakınlığı olmak üzere üç farklı bilgiyi ayırır. Origami iskeleti, bastırma ve kayma durumlarına farklı tepki verdiği için tasarımcılar normal ve kayma kuvvetlerini minimum girişimle okuyabilir. Üstteki ince metal kaplı film, bir iletken nesne yaklaştığında elektrik alanındaki değişiklikleri algılayan bir yakınlık sensörü görevi görür; hatta temas olmadan önce bile değişiklikleri yakalar. Beş fonksiyonel katmanı üst üste koymalarına rağmen, tüm deri yalnızca yaklaşık 9 milimetre kalınlığındadır, düz veya eğimli yapılabilir ve yuvarlak robot kollarına uyum sağlar.
Veri ve tasarımla daha keskin dokunuş
Çok ince dokunma çözünürlüğüne yalnızca mekanik tasarımla ulaşmak yeterli olmadığından ekip makine öğrenimine yöneldi. Deriye farklı noktalarda ve farklı kuvvetlerle binlerce veri noktası toplayıp, kapasitans değişim desenlerini tam dokunuş konumu ve kuvvetine eşleyen sinir ağı modellerini eğittiler. Bu yaklaşımla deri “süper-çözünürlük” elde ediyor: elektrot aralığının ötesinde çok daha hassas lokalleştirme yapabiliyor; ortalama pozisyon hataları yalnızca birkaç milimetre ve kuvvet hataları yalnızca birkaç yüzstel newton seviyesinde. Tek dokunuş ölçümlerini zekice birleştirerek, dokunulan noktalar hemen bitişik olmadıkça aynı anda birden fazla dokunuşu tanıma yöntemini de genişlettiler.
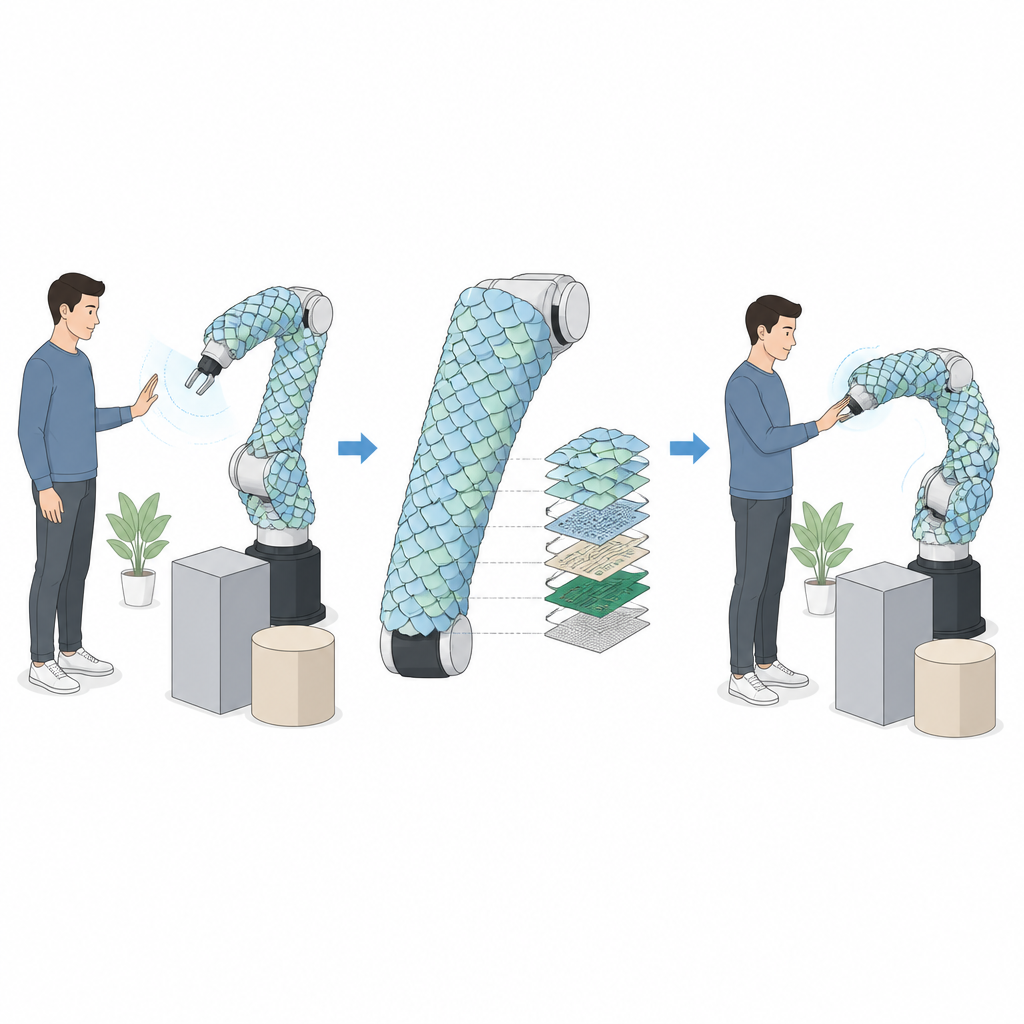
Sizi hisseden ve sizden kaçınan robotlar
Pratik kullanımı göstermek için araştırmacılar birkaç eğimli e-deri modülünü bir robot koluna monte ettiler. Bir kişi kola bastığında, robot itme yönünde hareket ediyor veya yan kuvvetlere yanıt olarak döner; bu da kontrolü daha sezgisel kılıyor. Bir el temassız yaklaştığında, yakınlık katmanı bunu algılıyor ve kolu yavaşlatabilir veya durdurabilir ya da elin güvenli bir mesafede takibini sağlayabilir. Sistem ayrıca robotun iletken engellerin etrafından görevine ara vermeden yol değiştirmesini sağlıyor. Bir arada, bu yetenekler temas hisseden ve çevresini algılayan bir deri tarafından yönlendirilen, insanlarla daha güvenli ve doğal şekilde alan paylaşan robotlara işaret ediyor.
Atıf: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Anahtar kelimeler: elektronik deri, robotik dokunma algılama, origami yapılar, insan robot etkileşimi, yakınlık algılama