Clear Sky Science · ar
جلد إلكتروني روبوتي مستوحى من الأحياء بتقنية الأوريغامي وذو قدرات استشعار متعددة الوسائط
لمس ذكي لروبوتات أكثر أمانًا
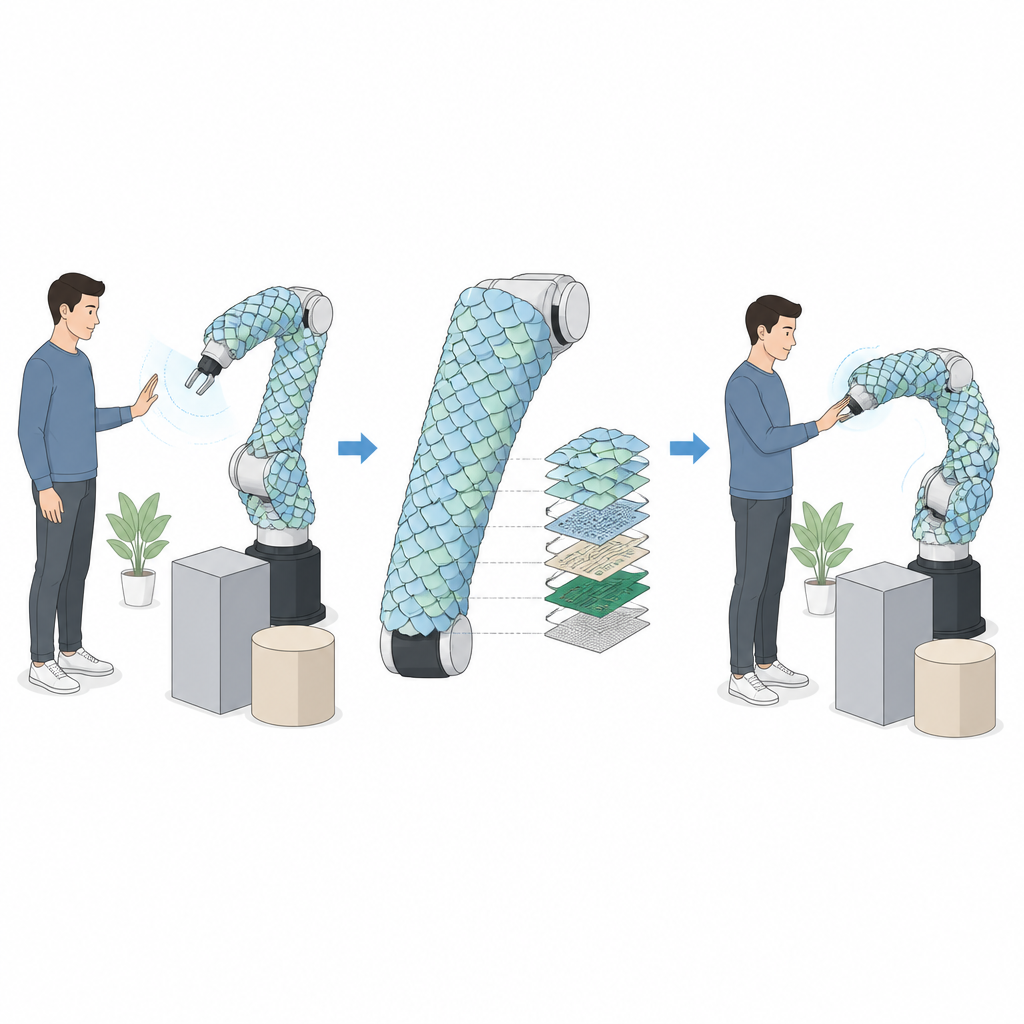
تخيل روبوتًا يستطيع أن يشعر بلمسة لطيفة، ويكتشف يدًا قريبة قبل التلامس، ويتفاعل بسلاسة بدلًا من التوقف المفاجئ. تصف هذه الدراسة نوعًا جديدًا من الجلد الإلكتروني الذي يلتف حول الآلات كقشرة مرنة، مانحًا إياها حاسة للمس والقرب تشبه الكائنات الحية، مع الحفاظ على مكونات رقيقة ومتانة وعملية للاستخدام في العالم الحقيقي.
لماذا تحتاج الروبوتات إلى جلد أفضل
مع انتقال الروبوتات من المصانع إلى المنازل والمستشفيات ومساحات العمل المشتركة، يجب أن تتعامل مع التلامس الوثيق مع الناس. تعتمد مستشعرات اللمس التقليدية غالبًا على شبكات كثيفة من وحدات استشعار صغيرة، ما يجعلها معقدة وضخمة وصعبة التوصيل عبر مساحات واسعة. وهذا يصعّب تغطية ذراع أو جسم الروبوت بسطح حساس ومستمر. يتعامل العمل الجديد مع هذه المشكلة بإنشاء "جلد إلكتروني" كبير المساحة يحتاج إلى قنوات استشعار أقل بكثير ومع ذلك يمكنه تحديد مكان وقوة اللمسة.
استلهام من الأسماك وطَيّ الورق
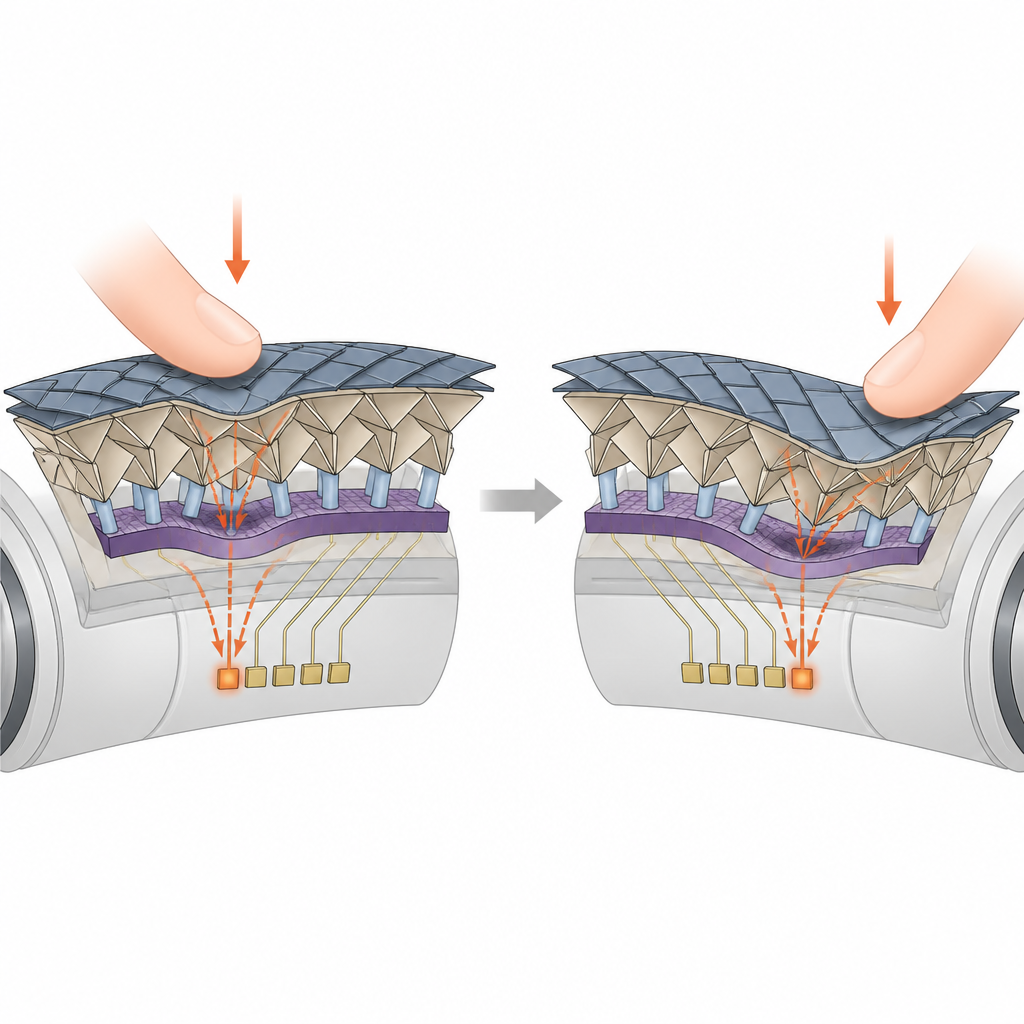
استلهم الباحثون من جلد السمك والأوريغامي. تتداخل قشور السمك لتشكيل سطح مرن لكنه واقٍ. تسمح أنماط الأوريغامي لورقة مسطحة أن تطوى إلى أشكال ثلاثية الأبعاد معقدة. جمع الفريق هاتين الفكرتين في بنية متعددة الطبقات: "قشور" من المطاط المطاطي الناعم في الأعلى، وطبقة دائرة بنمط الأوريغامي في الوسط، وأعمدة دعم وعنصر استشعار القص في الأسفل. عندما يضغط الضغط على نقطة واحدة، تنشر الإطار الأوريغامي هذا التشوه جنبًا إلى جنب عبر العديد من الخلايا. من خلال قياس التغيرات الطفيفة في السعة الكهربائية عند عدد صغير من الأقطاب، يمكن للنظام استنتاج موقع وشدة اللمسة عبر مساحة أكبر بكثير من التصاميم التقليدية.
حواس متعددة في طبقة رقيقة واحدة
هذا الجلد الإلكتروني أكثر من مجرد لوحة ضغط بسيطة. يميّز بين ثلاثة أنواع من المعلومات: الضغط العمودي (الضغط للداخل)، وقوة القص (الانزلاق عبر السطح)، والقرب من الأجسام الموصلة مثل اليد البشرية. يتفاعل العمود الفقري الأوريغامي بشكل مختلف مع الضغط والانزلاق، لذا يمكن للمصممين قراءة قوى الضغط والقص مع تداخل طفيف. تفي طبقة رقيقة مطلية بالمعدن في الأعلى بدور مستشعر قرب، تلتقط تغيّرات في المجال الكهربائي عندما يقترب جسم موصل حتى قبل التلامس. على الرغم من تكديس خمس طبقات وظيفية، يبقى الجلد بأكمله بسمك نحو 9 مليمترات فقط، ويمكن صنعه مسطحًا أو منحنيًا، ويت conform إلى أذرع الروبوت المستديرة.
دقة لمسية أعلى عبر البيانات والتصميم
لا يكفي التصميم الميكانيكي وحده للوصول إلى دقة لمسية فائقة، لذا لجأ الفريق إلى التعلم الآلي. جمعوا آلاف نقاط البيانات بالضغط على الجلد في مواقع مختلفة وبقوى متنوعة، ثم درّبوا نماذج شبكات عصبية لربط نمط تغيّر السعة بالموقع الدقيق لللمسة وقوتها. بفضل هذا الأسلوب يحقق الجلد "فائقة الدقة": يمكنه تحديد مواضع اللمسات بدقة أكبر بكثير من تباعد الأقطاب نفسها، مع أخطاء موقع متوسطة لا تتجاوز بضعة مليمترات وأخطاء قوة لا تتجاوز بضع أعشار نيوتن. وبالاستفادة الذكية من قياسات اللمسة الواحدة، وسعوا أيضًا الطريقة للتعرف إلى لمسات متعددة في آن واحد، شريطة ألا تكون النقاط الملموسة متجاورة مباشرة.
روبوتات تشعر وتتفاداك
لإظهار الاستخدام العملي، ركب الباحثون عدة وحدات جلد إلكتروني منحنية على ذراع روبوت. عندما يضغط شخص على الذراع، يتحرك الروبوت في اتجاه الدفع أو يدور استجابة للقوى الجانبية، مما يجعل التحكم أكثر بديهية. عندما تقترب يد دون لمس، تكتشف طبقة القرب ذلك ويمكنها إبطاء الذراع أو إيقافها أو مساعدتها على تتبع اليد على مسافة آمنة. يتيح النظام أيضًا للروبوت التفافًا حول عقبات موصلة، مغيرًا مساره دون أن يوقف مهمته. معًا، تشير هذه القدرات إلى روبوتات تشارك الفضاء مع الناس بأمان وطبيعية أكبر، بقيادة جلد يستشعر كلًا من التلامس وما هو قريب منه.
الاستشهاد: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
الكلمات المفتاحية: الجلد الإلكتروني, استشعار لمسة روبوتية, هياكل الأوريغامي, تفاعل الإنسان والروبوت, استشعار القرب