Clear Sky Science · en
A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities
Smart touch for safer robots
Imagine a robot that can feel a gentle tap, sense a nearby hand before contact, and react smoothly instead of jerking to a halt. This study describes a new kind of electronic skin that wraps around machines like a flexible shell, giving them a sense of touch and nearness similar to living creatures while keeping the hardware thin, robust, and practical for real-world use.
Why robots need better skin
As robots move out of factories and into homes, hospitals, and shared workplaces, they must handle close contact with people. Traditional touch sensors often rely on dense grids of tiny sensing units, which quickly become complicated, bulky, and hard to wire over large areas. That makes it difficult to cover an entire robot arm or body with a continuous, sensitive surface. The new work tackles this problem by creating a large-area “e-skin” that needs far fewer sensing channels yet can still pinpoint where and how hard it is being touched.
Borrowing ideas from fish and paper folding
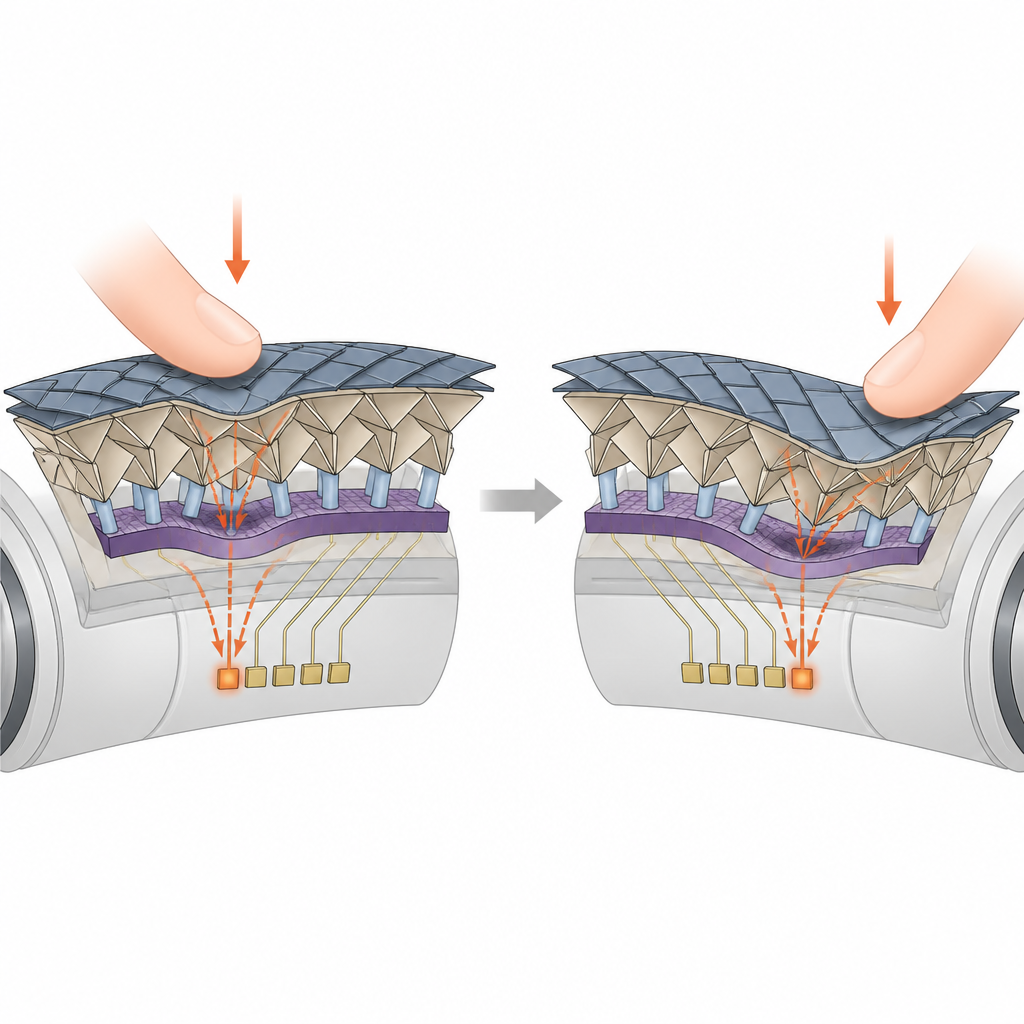
The researchers looked to fish skin and origami for inspiration. Fish scales overlap to make a flexible but protective surface. Origami patterns allow a flat sheet to fold into complex three-dimensional shapes. The team combined these ideas into a layered structure: soft elastomer “scales” on top, an origami-patterned circuit layer in the middle, and support pillars and shear-sensing elements underneath. When pressure pushes on one spot, the origami framework spreads that deformation sideways across many cells. By measuring tiny changes in electrical capacitance at a small number of electrodes, the system can infer the position and strength of the touch over a much larger area than conventional designs.
Many senses in one thin layer
This e-skin is more than a simple pressure pad. It separates three kinds of information: normal pressure (pressing in), shear force (sliding across), and proximity of conductive objects such as a human hand. The origami backbone reacts differently to pressing and sliding, so the designers can read out normal and shear forces with minimal interference. A thin metal-coated film on top serves as a proximity sensor, picking up changes in the electric field when a conductive object comes close, even before contact. Despite stacking five functional layers, the whole skin remains only about 9 millimeters thick, can be made flat or curved, and conforms to round robot arms.
Sharper touch through data and design
The mechanical design alone is not enough to reach very fine touch resolution, so the team turned to machine learning. They collected thousands of data points by pressing the skin at different spots and with different forces, then trained neural network models to map the pattern of capacitance changes to the exact touch location and force. With this approach, the skin achieves “super-resolution”: it can localize touches much more precisely than the spacing of the electrodes would suggest, with average position errors of only a few millimeters and force errors of only a few hundredths of a newton. By cleverly combining single-touch measurements, they also extended the method to recognize multiple touches at once, as long as the touched spots are not immediately adjacent.
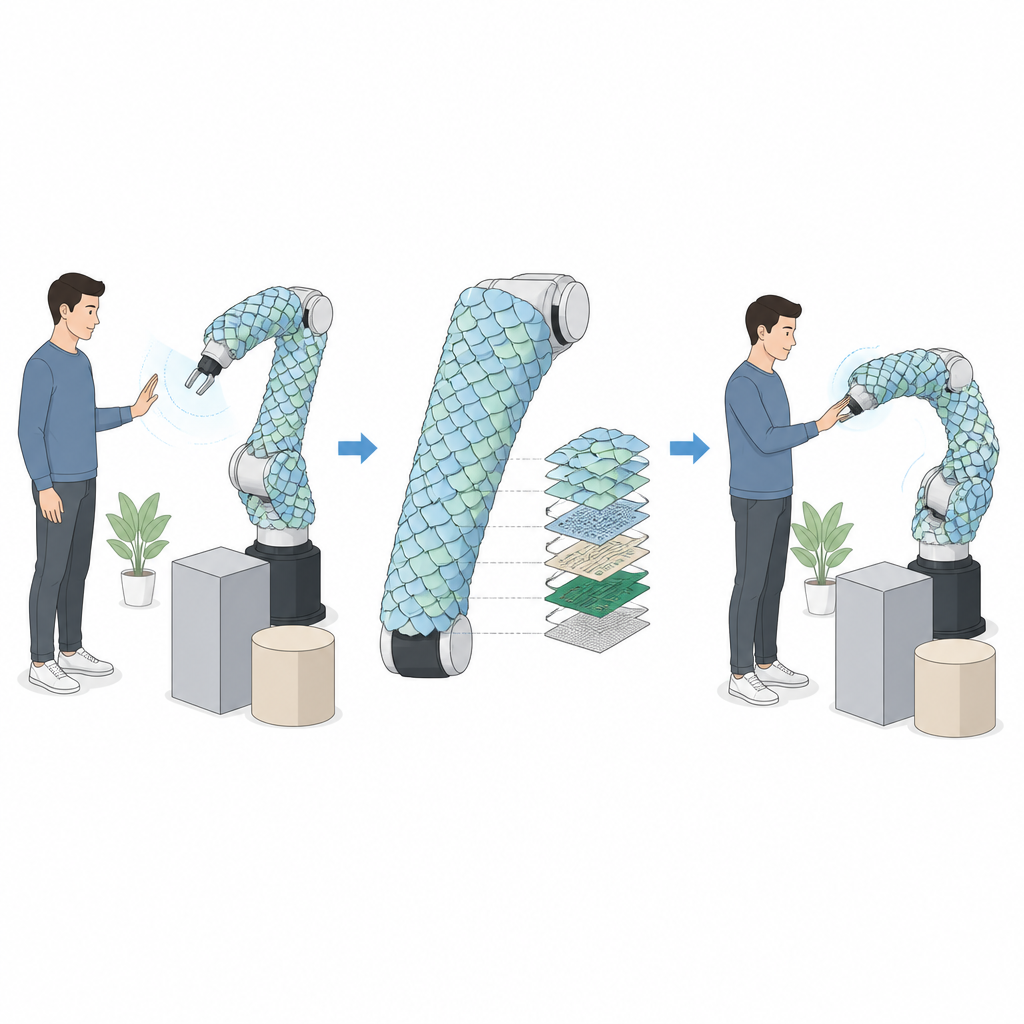
Robots that feel and avoid you
To show practical use, the researchers mounted several curved e-skin modules on a robotic arm. When a person presses on the arm, the robot moves in the direction of the push or rotates in response to sideways forces, making control more intuitive. When a hand approaches without touching, the proximity layer detects it and can slow or stop the arm, or help it track the hand at a safe distance. The system also lets the robot steer around conductive obstacles, changing its path without stopping its task. Together, these abilities point to robots that share space with people more safely and naturally, guided by a skin that both feels contact and senses what is nearby.
Citation: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
Keywords: electronic skin, robotic touch sensing, origami structures, human robot interaction, proximity sensing