Clear Sky Science · ja
生体に学んだ折り紙型静電容量ロボット電子皮膚、多モーダルセンシング機能を備える
より安全なロボットのためのスマートな触覚
やわらかなタップを感じ取り、接触前に近づく手を検知し、急停止するのではなく滑らかに反応するロボットを想像してみてください。本研究は、機械を薄い外殻のように包み込み、生き物に似た触覚と近接感覚を与える新しいタイプの電子皮膚を記述します。ハードウェアは薄く、耐久性があり、実用性も兼ね備えています。
なぜロボットに優れた皮膚が必要か
ロボットが工場を出て家庭や病院、共有の作業空間へと入るにつれて、人と密接に接触する状況が増えます。従来の触覚センサーは小さな検知ユニットを密に並べることに頼りがちで、大面積に敷設すると配線が複雑になり、かさばりやすくなります。そのため、ロボットの腕や胴体全体を連続した感度の高い表面で覆うのが難しくなります。本研究は、はるかに少ない検知チャネルで、触れられた位置と力の大きさを特定できる大面積の「e-スキン」を提案してこの問題に対処しています。
魚と紙折りのアイデアを借りる
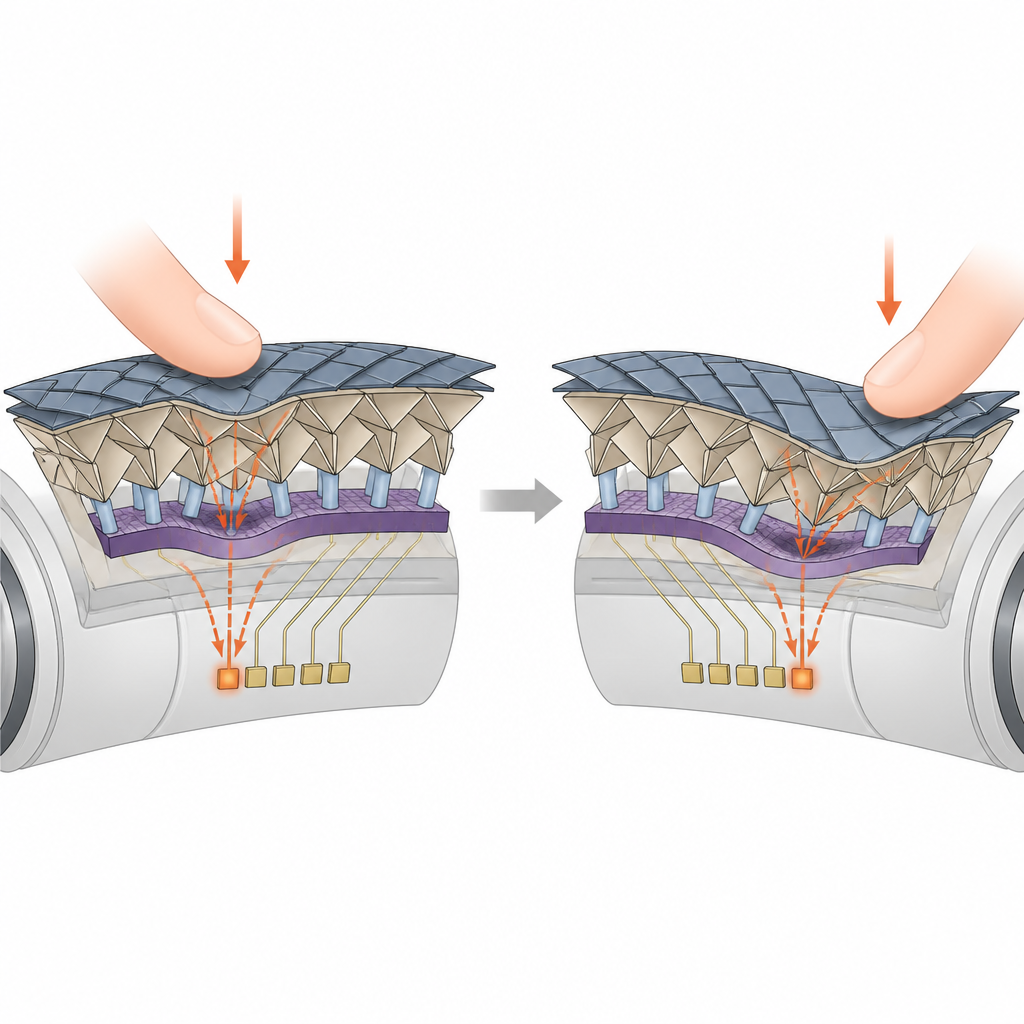
研究者たちは魚の皮と折り紙に着想を得ました。魚の鱗は柔軟でありながら保護的に重なり合います。折り紙のパターンは平面を折りたたんで複雑な立体形状に変えることを可能にします。チームはこれらの考えを組み合わせ、層状構造を作りました。上層に柔らかいエラストマー製の“鱗”、中間に折り紙パターンの回路層、下部に支持柱と剪断(シアー)検知要素を配置しています。ある点に圧力が加わると、折り紙フレームワークがその変形を横方向に多くのセルへと広げます。少数の電極で電気的静電容量のわずかな変化を測ることで、従来設計に比べてはるかに広い面積上の触れた位置と力を推定できます。
薄い一層で多様な感覚を
このe-スキンは単なる圧力パッド以上の機能を持ちます。垂直方向の圧力(押し込み)、剪断力(滑り)、導電体(人の手など)の近接という三種類の情報を分離して取得します。折り紙の骨格は押し込みと滑りで異なる反応を示すため、設計者は通常の力と剪断力を相互干渉を最小限にして読み取れます。上面の薄い金属コーティング膜は近接センサーとして機能し、導電体が接触する前でも電界の変化を検出します。五つの機能層を積層しているにもかかわらず、全体の厚みは約9ミリメートルに収まり、平面にも曲面にも作れ、円形のロボットアームに適合します。
データと設計で研ぎ澄まされる触覚
機械的設計だけでは非常に高い触覚分解能に達するのは難しいため、チームは機械学習に頼りました。皮膚のさまざまな箇所を異なる力で押すことで数千のデータ点を収集し、静電容量変化のパターンを正確な触地点と力に写像するニューラルネットワークモデルを訓練しました。このアプローチにより、皮膚は“超解像”を達成し、電極間隔からは想定しにくいほど精密に触点を局在化できます。平均位置誤差は数ミリメートル、力の誤差は数百分の一ニュートンにとどまります。単一タッチ測定を巧妙に組み合わせることで、触れた箇所が互いに隣接していない限り、複数の同時タッチも認識できるように拡張しています。
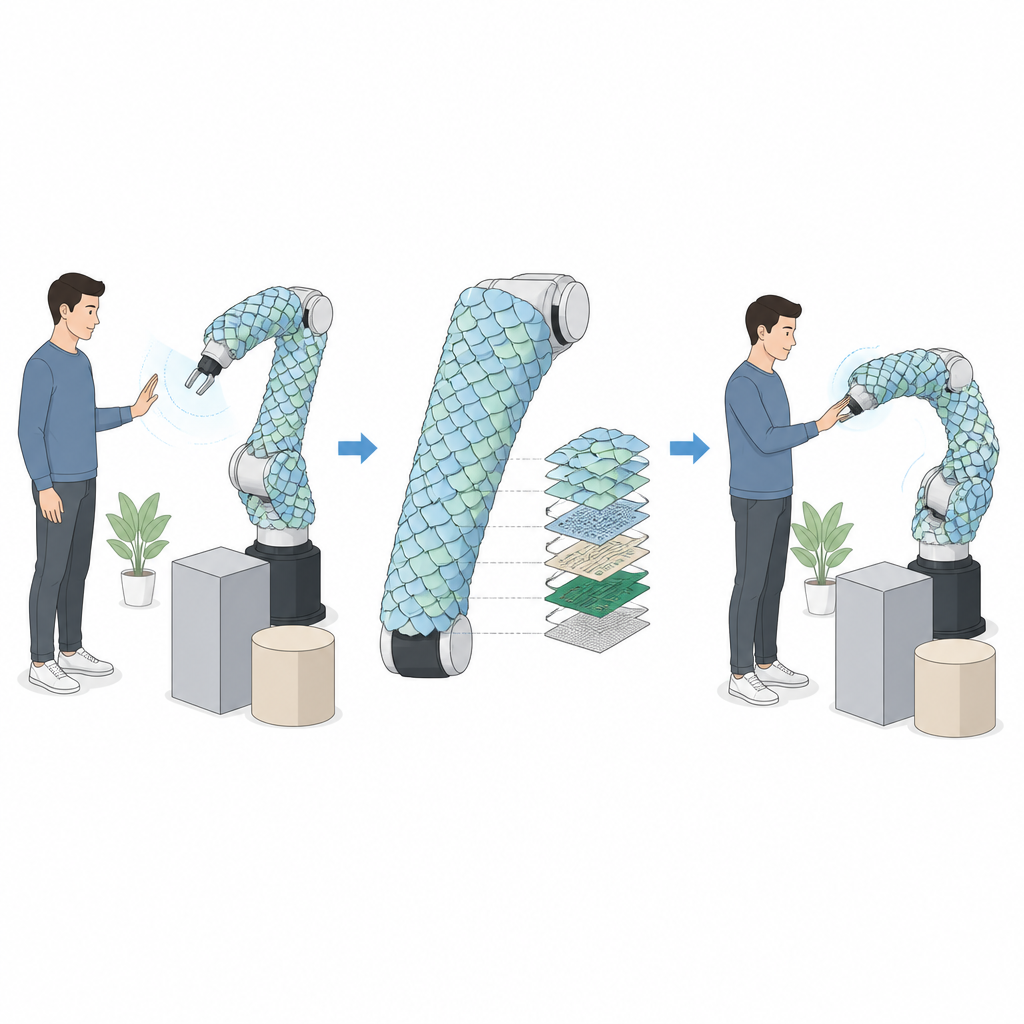
触れて避けるロボット
実用例を示すために、研究者たちは複数の曲面e-スキンモジュールをロボットアームに取り付けました。人がアームを押すと、ロボットは押された方向に動くか、横方向の力に応じて回転し、制御が直感的になります。手が触れずに近づくと、近接層が検知してアームを減速または停止させたり、安全な距離で手を追跡させたりできます。システムは導電性の障害物を回避するように軌道を変えることも可能で、作業を止めずに進路を変えられます。これらの能力は、接触を感じ取り近接を感知する皮膚によって、人と空間を共有するロボットがより安全で自然に振る舞えることを示しています。
引用: Xu, Q., Zhang, B., Cheung, Y.K. et al. A bio-inspired origami capacitive robotic e-skin with multimodal sensing capabilities. npj Flex Electron 10, 63 (2026). https://doi.org/10.1038/s41528-026-00563-3
キーワード: 電子皮膚, ロボット触覚センシング, 折り紙構造, 人間とロボットの相互作用, 近接センシング