Clear Sky Science · zh
受机械感受器启发的用于人工体感的多感官纤维
通过一根细线感知世界
想象一台机器人能够通过一根像缝纫线一样纤细柔韧的元件感知自身运动和握手时的压力。本文描述的正是一种这样的智能纤维:它模仿我们神经如何同时感知运动与触觉。这项工作为类生命的人工皮肤、更灵活的机器人,以及能够实时读取身体运动与接触的无缝可穿戴设备打开了大门。
我们的身体如何感知触觉与运动
我们的“身体意识”来自皮肤和肌肉中的两类传感器。肌梭向大脑报告肌肉被拉伸的程度,帮助我们在不看身体的情况下知晓肢体位置。皮肤中的触觉感受器记录压力、纹理和接触。两类信号都沿着细长的神经束传输,这些神经像一维电缆一样贯穿全身,悄然协调姿势、行走、抓握与平衡。这种天然布线既紧凑又信息丰富,启发工程师希望让机器也能像我们一样顺畅地感知世界。
为何平面传感器不够
许多研究组在平面片上采用印刷或分层电子元件制造人工触觉传感器。虽然这些可以检测压力或伸展,但通常只限于一种信号,并且不易包裹在手指、脚踝或机器人关节等弯曲的三维表面。要在平面上组合多种感测功能,通常需要叠层或并列布局,这会导致信号相互干扰、在某些方向上增加刚性,并使布线与制造变得复杂。因此,大多数现有的人工“皮肤”仍无法匹配真实神经网络那样的集成三维覆盖能力。
一种能同时感知两种信息的类神经纤维
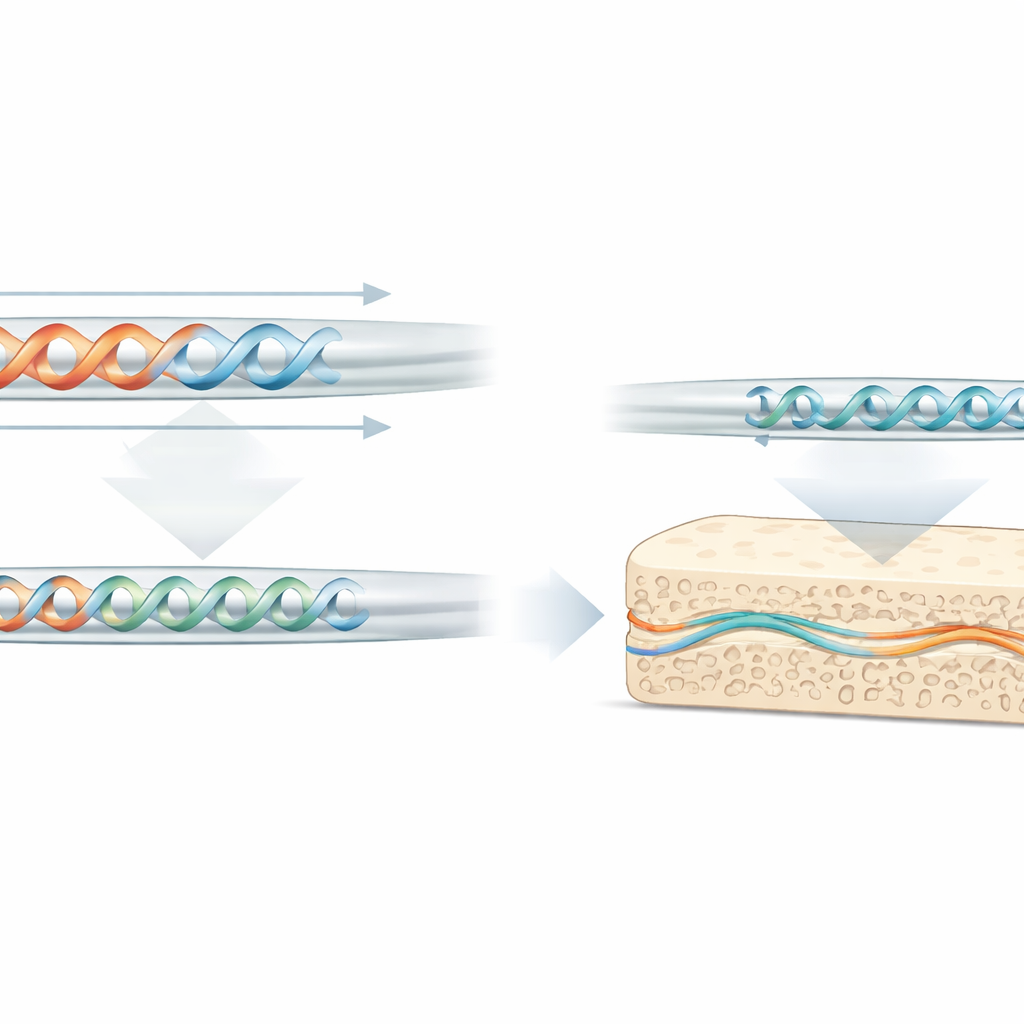
作者们通过仿效身体的一维神经布局来解决这一问题。他们使用一种热拉制工艺——类似拉制光纤的方法——制造出长而细的纤维,这些纤维在精确的横截面内组织了多种材料。在每根纤维内部,一个透明塑料光波导充当人工肌肉传感器:它被卷成弹簧状,因此拉伸纤维会改变透过的光量。在同一根纤维的另一个位置,一个充填导电颗粒的多孔橡胶块充当人工触觉传感器:按压会挤压微小孔隙并改变其电阻。因为伸展信号由光学处理而压力信号由电学处理,两种感觉自然分离,同时共享单一柔性的“类神经”通路。
类神经纤维的性能如何
研究团队仔细调节了纤维的几何结构——长度、卷数与卷径——以在灵敏度与可靠的光传输之间取得平衡。在测试中,光学单元在纤维拉伸时呈现出清晰且可重复的信号变化,并在数百个应变循环后仍保持性能。触觉单元采用糖模板法制造了孔径数百微米的海绵状橡胶结构,随后涂覆碳颗粒网络。这种多孔设计使压力传感器比同种材料的实体块更为灵敏且响应不迟缓,同时在数千次按压-释放循环中保持稳定,并能快速响应抓取等快速动作。
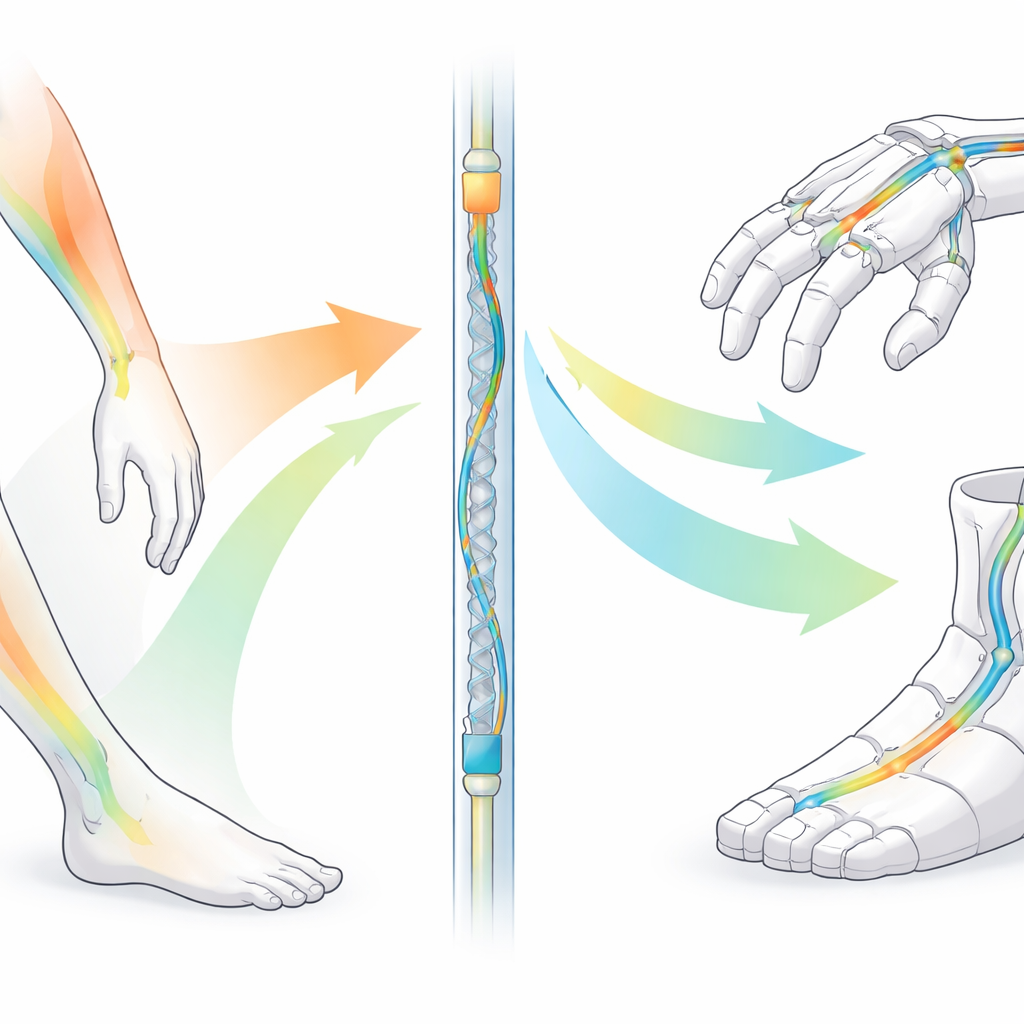
能感觉的机器人手与脚
为了展示这些纤维在实际中的应用,研究者将它们穿入3D打印的机器人手与脚。在一次按笔测试中,纤维的“肌肉”部分追踪了机器人手指弯曲的程度,而“皮肤”部分捕捉到了按笔时的短促压力峰值。在模拟行走的机器人脚运动中,一组纤维监测踝关节与脚趾的弯曲,另一组感测脚跟、中足与脚趾的压力。通过组合这些信号,系统能够重建脚何时触地、重量如何转移以及脚趾何时蹬离——类似于关节与压力感知共同维持人类行走平衡的自然协调。
这对未来机器人的意义
通俗来说,这项研究表明可以将两种关键感觉——运动与触觉——封装进单一线状元件,使其能穿行于复杂的三维形状。由于纤维灵活、易扩展且可制成长长度,它可以被织入服装、嵌入软体机器人或缠绕在假肢上,几乎不增加体积与布线。随着时间推移,通过增加更多感测区域或加入对温度敏感的元件,这类纤维网络可形成一种人工神经系统,从而赋予机器与可穿戴设备更丰富、更类人的身体与环境感知,改善控制、安全性与人机交互的真实感。
引用: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
关键词: 人工皮肤, 多感官纤维, 机器人触觉, 本体感受, 软体机器人