Clear Sky Science · pl
Wielozmysłowe włókna inspirowane mechanoreceptorami dla sztucznej somatosensacji
Odczuwać świat jednym włóknem
Wyobraź sobie robota, który może wyczuwać własne ruchy i nacisk uścisku dłoni za pomocą czegoś tak cienkiego i elastycznego jak nić krawiecka. Artykuł opisuje właśnie coś takiego: nowy rodzaj inteligentnego włókna, które naśladuje sposób, w jaki nasze nerwy odbierają ruch i dotyk. Praca ta otwiera drogę do realistycznej sztucznej skóry, bardziej zwinnych robotów oraz bezproblemowych urządzeń noszonych, które w czasie rzeczywistym odczytują ruchy ciała i kontakt ze światem.
Jak nasze ciało czuje dotyk i ruch
Poczucie „świadomości ciała” pochodzi z dwóch typów czujników w skórze i mięśniach. Wrzecionka mięśniowe informują mózg, jak bardzo mięśnie są rozciągnięte, pomagając określić położenie kończyn bez potrzeby patrzenia. Receptory dotykowe w skórze rejestrują nacisk, teksturę i kontakt. Oba typy przesyłają sygnały wzdłuż cienkich pęczków nerwowych, które biegną jak jednowymiarowe przewody przez ciało, cicho koordynując postawę, chodzenie, chwytanie i równowagę. To naturalne okablowanie jest kompaktowe, a jednocześnie bogate informacyjnie, i stanowi inspirację dla inżynierów chcących, by maszyny odbierały świat równie płynnie jak my.
Dlaczego płaskie czujniki zawodzą
Wiele zespołów badawczych tworzyło sztuczne czujniki dotyku na płaskich arkuszach przy użyciu elektroniki drukowanej lub warstwowej. Choć potrafią wykrywać nacisk lub rozciąganie, często ograniczają się do jednego typu sygnału i trudno je owinąć wokół zakrzywionych, stawowych powierzchni, takich jak palce, kostki czy ramiona robotów. Łączenie kilku funkcji pomiarowych na płaskiej powierzchni zwykle oznacza układanie warstw lub rozmieszczanie wielu elementów obok siebie. To może powodować wzajemne zakłócenia sygnałów, usztywniać urządzenie w pewnych kierunkach oraz komplikować okablowanie i produkcję. W efekcie większość współczesnych sztucznych „skór” nadal nie dorównuje zintegrowanemu, trójwymiarowemu pokryciu naturalnych sieci nerwowych.
Nerwopodobne włókno, które czuje dwie rzeczy naraz
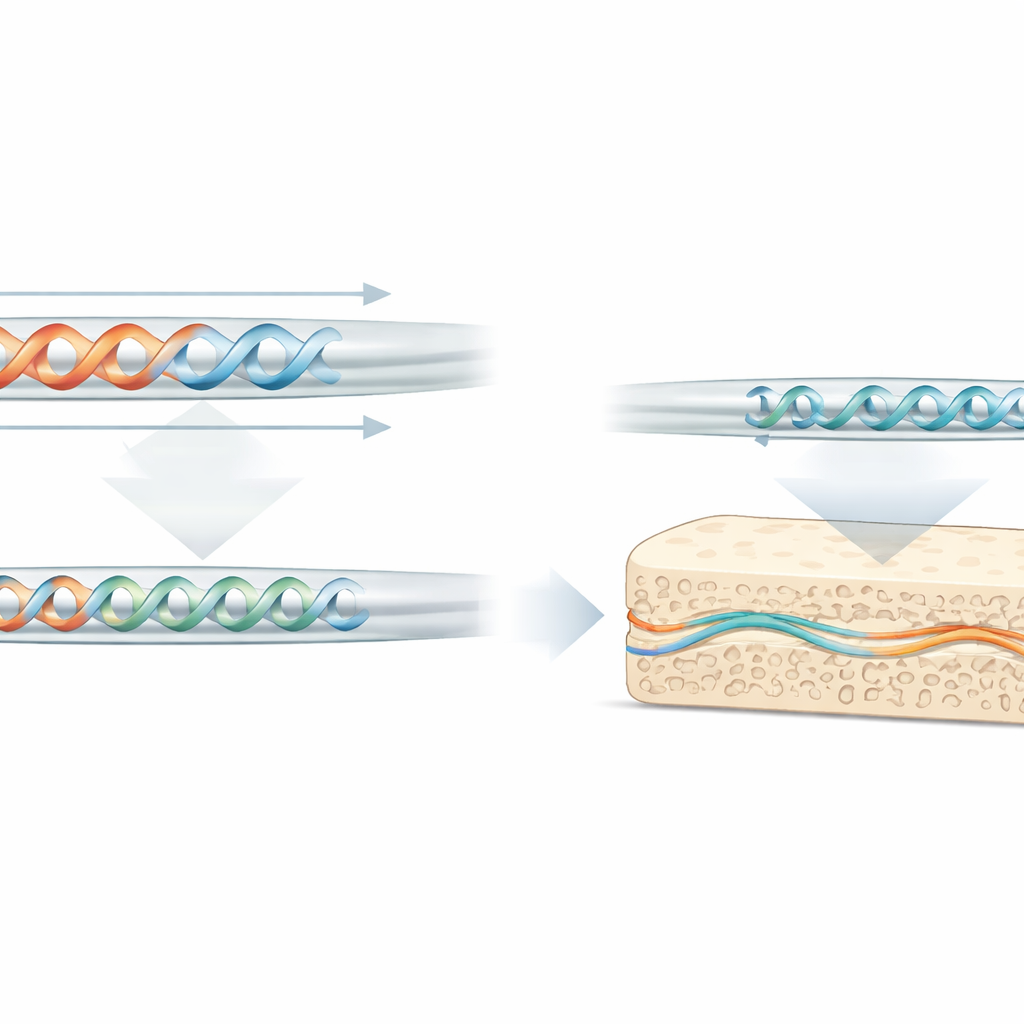
Autorzy rozwiązali ten problem, kopiując jednowymiarowe rozmieszczenie nerwów w ciele. Wykorzystali proces ciągnienia termicznego—podobny do wytwarzania włókien optycznych—by stworzyć długie, włosowate nitki zawierające wiele materiałów uporządkowanych w precyzyjnym przekroju. Wewnątrz każdego włókna przezroczyste plastikowe światłowodowe prowadnice pełnią rolę sztucznego czujnika mięśniowego: są zwinięte w sprężynowaty kształt, więc rozciąganie włókna zmienia ilość przepuszczanego światła. W innym miejscu tego samego włókna porowaty gumowy blok wypełniony przewodzącymi cząstkami działa jako sztuczny czujnik dotyku: jego ściśnięcie zmniejsza pory i zmienia oporność elektryczną. Ponieważ sygnał rozciągania jest przekazywany światłem, a sygnał nacisku elektrycznością, oba rodzaje czucia są naturalnie rozdzielone, a jednocześnie współdzielą pojedynczą, elastyczną „nerwopodobną” ścieżkę.
Jak dobrze działają sztuczne nerwy
Zespół starannie dostroił geometrię włókna—jego długość, liczbę zwojów i średnicę tych zwojów—by zrównoważyć czułość z niezawodnym przewodzeniem światła. W testach jednostka optyczna wykazała wyraźną, powtarzalną zmianę sygnału podczas rozciągania włókna i przetrwała setki cykli odkształceń bez degradacji. Jednostka dotykowa wykorzystała metodę z użyciem szablonu z cukru do stworzenia gąbczastej struktury gumowej o porach szerokości kilkuset mikrometrów, a następnie pokryto ją siecią cząstek węgla. Taka porowata konstrukcja uczyniła czujnik nacisku znacznie bardziej czułym i mniej opóźnionym niż blok o tej samej masie materiału, przy jednoczesnym zachowaniu stabilności przez tysiące cykli nacisk–zwolnienie i szybkim reagowaniu wystarczającym dla szybkich ruchów, takich jak chwytanie przedmiotów.
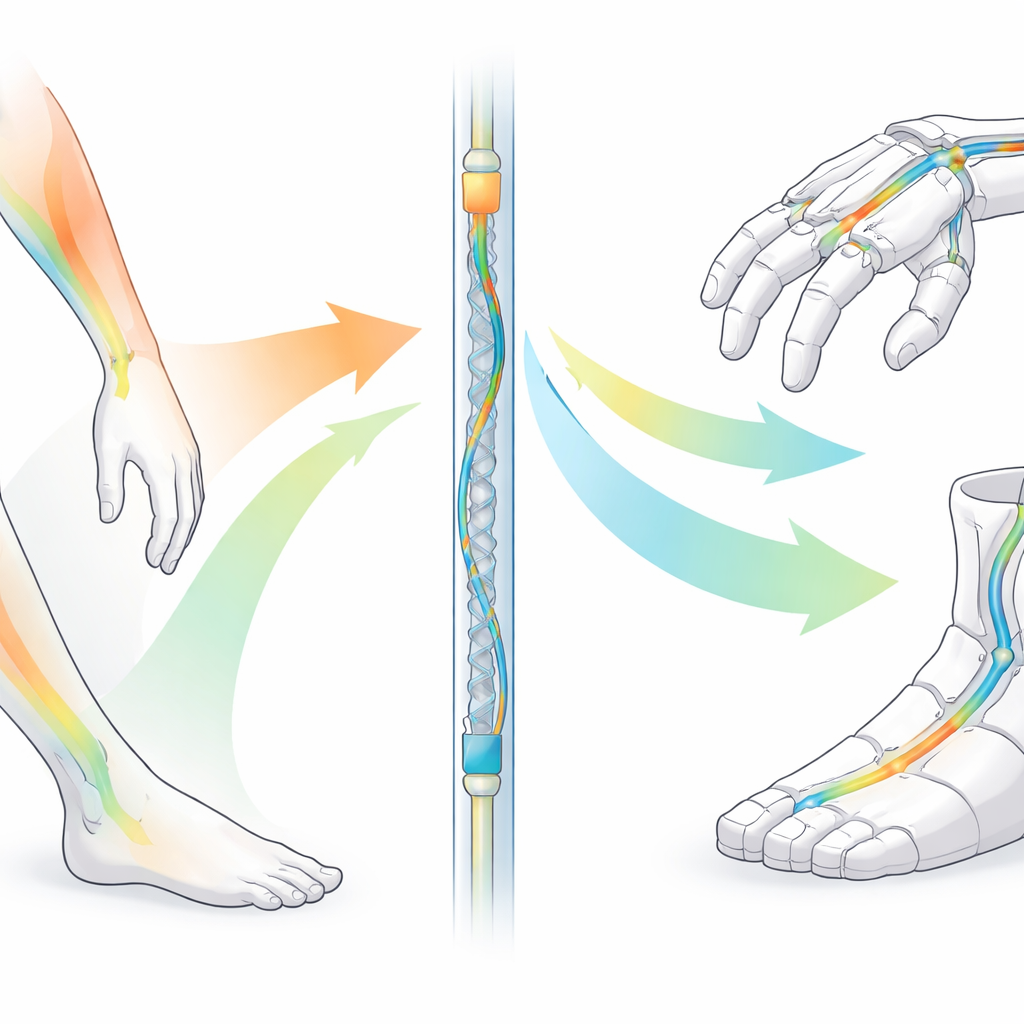
Robotyczne dłonie i stopy, które potrafią czuć
Aby pokazać praktyczne zastosowanie włókien, badacze przeciągnęli je przez drukowane w 3D robotyczne dłonie i stopy. W teście klikania długopem część „mięśniowa” włókna śledziła, jak bardzo zginano palec robota, podczas gdy część „skórna” rejestrowała krótkie skoki nacisku przy klikaniu. Podczas symulowanego ruchu przypominającego chodzenie włókno jednej serii monitorowało zginanie kostki i palców, a inna seria wyczuwała nacisk na pięcie, śródstopiu i palcu. Łącząc te sygnały, system potrafił odtworzyć moment uderzenia stopy o podłoże, przesunięcia ciężaru i wybicie palcem—podobnie jak naturalna koordynacja czujników stawów i nacisku, zapewniająca ludziom równowagę podczas chodzenia.
Co to może znaczyć dla przyszłych maszyn
Mówiąc prościej, badania te pokazują, że można zmieścić dwa kluczowe zmysły—ruch i dotyk—w pojedynczym, nitkowatym elemencie, który może wplątywać się w złożone kształty 3D. Ponieważ włókno jest elastyczne, skalowalne i produkowane w długich odcinkach, można je wplatać w odzież, osadzać w miękkich robotach lub owijać wokół protez przy minimalnej objętości i okablowaniu. Z czasem, dodając kolejne obszary sensoryczne lub nawet elementy czułe na temperaturę, sieci takich włókien mogłyby stworzyć rodzaj sztucznego układu nerwowego. Mogłoby to dać maszynom i urządzeniom noszonym bogatsze, bardziej ludzkie odczucie własnego ciała i otoczenia, poprawiając sterowanie, bezpieczeństwo i realizm interakcji człowiek–maszyna.
Cytowanie: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Słowa kluczowe: sztuczna skóra, wielozmysłowe włókno, dotyk robotyczny, propriocepcja, miękka robotyka