Clear Sky Science · de
Mechanorezeptor-inspirierte multisensorische Fasern für künstliche Somatosensation
Die Welt mit einem einzigen Faden fühlen
Stellen Sie sich einen Roboter vor, der seine eigenen Bewegungen und den Druck eines Handschlags über etwas so Dünnes und Flexibles wie Nähgarn wahrnehmen kann. Dieses Paper beschreibt genau das: eine neue Art intelligenter Faser, die nachahmt, wie unsere Nerven sowohl Bewegung als auch Berührung registrieren. Die Arbeit öffnet die Tür zu lebensechter künstlicher Haut, agileren Robotern und nahtlosen Wearables, die Körperbewegungen und Kontakt mit der Umwelt in Echtzeit erfassen können.
Wie unser Körper Berührung und Bewegung wahrnimmt
Unser Gefühl von „Körperbewusstsein“ beruht auf zwei Arten von Sensoren in Haut und Muskeln. Muskelspindeln melden dem Gehirn, wie stark Muskeln gedehnt sind, und helfen uns zu wissen, wo sich unsere Gliedmaßen befinden, ohne hinzusehen. Taktile Rezeptoren in der Haut registrieren Druck, Textur und Kontakt. Beide Sensortypen leiten ihre Signale entlang schlanker Nervenbündel, die wie eindimensionale Kabel durch den Körper verlaufen und unauffällig Haltung, Gehen, Greifen und Gleichgewicht koordinieren. Diese natürliche Verkabelung ist kompakt und informationsreich und inspiriert Ingenieure, die Maschinen ein ebenso flüssiges Wahrnehmungsvermögen verleihen wollen wie uns.
Warum flache Sensoren nicht ausreichen
Viele Forschungsgruppen haben künstliche Tastsensoren auf flachen Folien mit gedruckter oder geschichteter Elektronik entwickelt. Zwar können solche Systeme Druck oder Dehnung erfassen, doch sind sie oft auf einen Sensortyp beschränkt und schwer um gekrümmte, gelenkige Flächen wie Finger, Knöchel oder Roboterarme zu legen. Mehrere Funktionen auf einer flachen Oberfläche zu kombinieren bedeutet meist, viele Schichten zu stapeln oder nebeneinander anzuordnen. Das kann zu Signalüberlagerung führen, das Gerät in bestimmten Richtungen steif machen und Verdrahtung sowie Fertigung verkomplizieren. Deshalb erreichen die meisten künstlichen „Häute“ heute noch nicht die integrierte, dreidimensionale Abdeckung realer Nerven-Netzwerke.
Eine nervenähnliche Faser, die zwei Dinge gleichzeitig fühlt
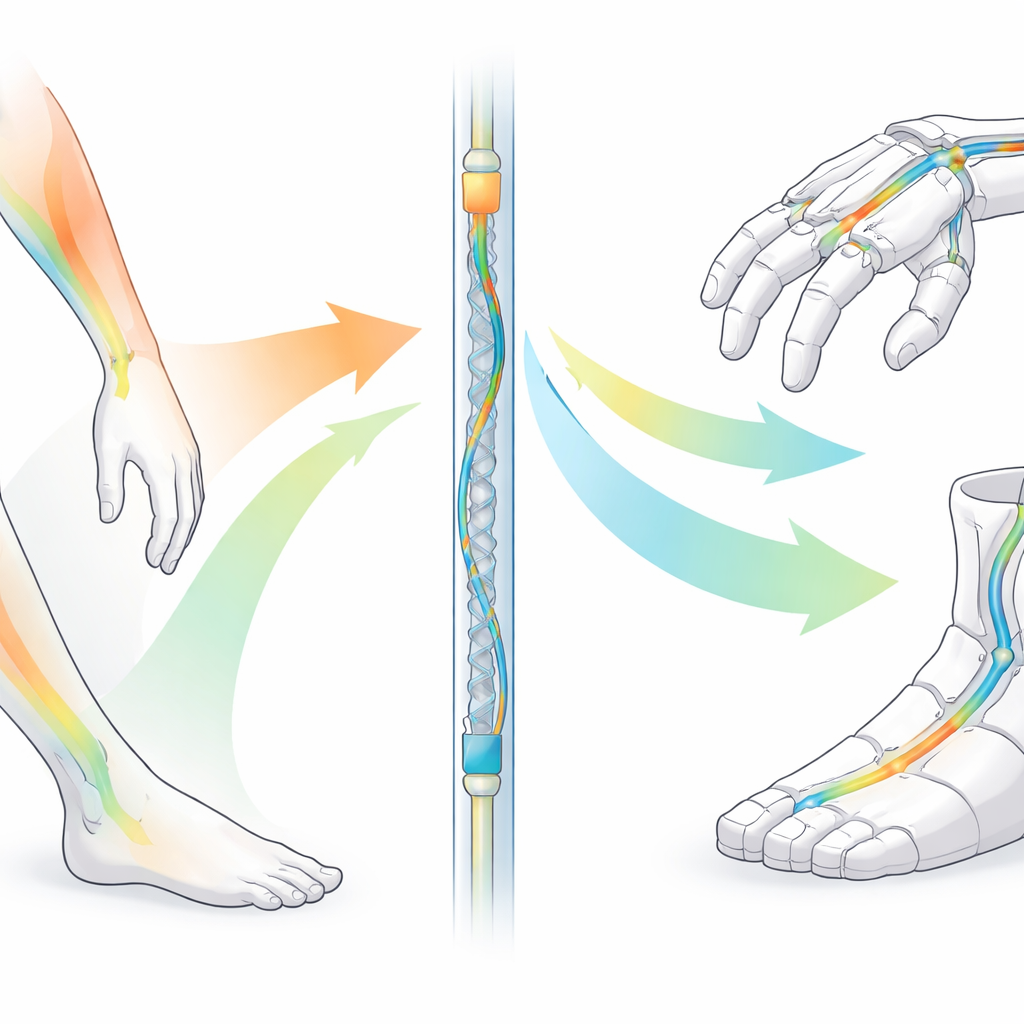
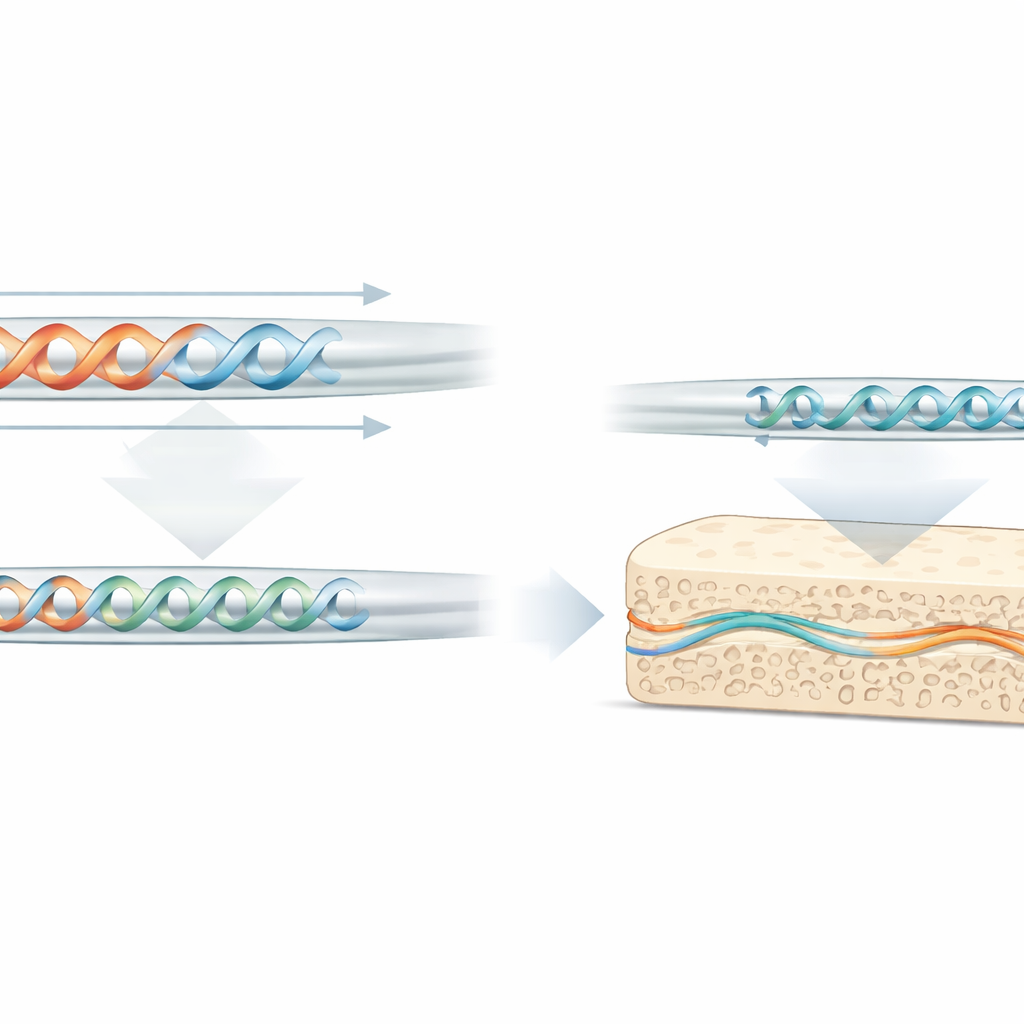
Die Autorinnen und Autoren gingen das Problem an, indem sie die eindimensionale Nervenanordnung des Körpers kopierten. Sie verwendeten einen thermischen Ziehprozess—ähnlich dem Ziehen von Glasfasern—um lange, haarfeine Stränge zu erzeugen, die mehrere Materialien in einer präzisen Querschnittsstruktur enthalten. Innerhalb jeder Faser fungiert eine transparente Kunststofflichtleitung als künstlicher Muskelsensor: Sie ist zu einer federähnlichen Spirale gewickelt, sodass das Dehnen der Faser die Lichtdurchlässigkeit verändert. An einer anderen Stelle desselben Strangs wirkt ein poröser Gummiblock, gefüllt mit leitfähigen Partikeln, als künstlicher Berührungssensor: Druck komprimiert die winzigen Poren und verändert den elektrischen Widerstand. Da Licht das Dehnungssignal und Elektrizität das Drucksignal überträgt, sind die beiden Sinne auf natürliche Weise getrennt und teilen dennoch denselben flexiblen, „nervenähnlichen“ Pfad.
Wie gut die künstlichen Nerven funktionieren
Das Team stimmte die Geometrie der Faser sorgfältig ab—Länge, Anzahl der Windungen und Durchmesser dieser Windungen—um Sensitivität und verlässliche Lichtübertragung auszubalancieren. In Tests zeigte die optische Einheit bei Dehnung der Faser klare, reproduzierbare Signaländerungen und hielt Hunderte von Dehnzyklen ohne Verschlechterung aus. Die Berührungseinheit nutzte eine Zucker-Template-Methode, um eine schwammartige Gummistruktur mit Poren von wenigen hundert Mikrometern zu erzeugen, die anschließend mit einem Netzwerk aus Kohlenstoffpartikeln beschichtet wurde. Dieses poröse Design machte den Drucksensor deutlich empfindlicher und weniger träge als einen massiven Block desselben Materials, blieb über Tausende von Druckfreigabe-Zyklen stabil und reagierte schnell genug für schnelle Bewegungen wie das Greifen von Objekten.
Roboterhände und -füße, die fühlen können
Um die praktische Funktion zu demonstrieren, fädelten die Forschenden die Fasern durch 3D-gedruckte Roboterhände und -füße. In einem Stiftdruck-Test verfolgte der „Muskel“-Teil der Faser, wie stark sich der Roboterfinger beugte, während der „Haut“-Teil die kurzen Druckspitzen beim Klicken des Stifts aufnahm. Bei einer gehähnlichen Bewegung eines Roboterfußes überwachte ein Satz Fasern das Beugen von Knöchel und Zehen, und ein anderer Satz erfasste den Druck an Ferse, Mittelfuß und Zehe. Durch die Kombination dieser Signale konnte das System rekonstruieren, wann der Fuß den Boden berührte, wie das Gewicht sich verlagte und wann die Zehe abstieß—ähnlich der natürlichen Koordination von Gelenk- und Druckwahrnehmung, die Menschen beim Gehen das Gleichgewicht hält.
Was das für zukünftige Maschinen bedeuten könnte
Kurz gesagt zeigt diese Forschung, dass es möglich ist, zwei zentrale Sinne—Bewegung und Berührung—in ein einzelnes, fadenartiges Element zu packen, das sich durch komplexe 3D-Formen schlängeln kann. Weil die Faser flexibel, skalierbar und in langen Längen herstellbar ist, lässt sie sich in Kleidung weben, in weiche Roboter einbetten oder mit minimalem Volumen und Verkabelungsaufwand um Prothesen wickeln. Mit der Zeit könnten Netzwerke solcher Fasern—durch Hinzufügen weiterer Sensorteile oder temperaturabhängiger Elemente—ein künstliches Nervensystem bilden. Das könnte Maschinen und Wearables eine reichere, menschenähnlichere Wahrnehmung ihres Körpers und ihrer Umgebung geben, was Steuerung, Sicherheit und die Realitätsnähe der Mensch–Maschine-Interaktion verbessert.
Zitation: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Schlüsselwörter: künstliche Haut, multisensorische Faser, robotischer Tastsinn, Propriozeption, weiche Robotik