Clear Sky Science · ja
機械受容器に着想を得た多感覚ファイバーによる人工触覚
一本の糸で世界を感じる
縫い糸ほど細く柔軟な一本の繊維を通して、自分の動きや握手の圧力を感じ取れるロボットを想像してみてください。本論文はまさにそれを実現する、新しいタイプのスマートファイバーを紹介します。これは私たちの神経が運動と触覚の両方を感知する仕組みを模倣したもので、皮膚のように振る舞う人工表皮、より機敏なロボット、そして身体の動きや接触をリアルタイムで読み取るウェアラブル機器への道を開きます。
私たちの体が触覚と運動を感知する仕組み
私たちの「身体認識」は皮膚や筋肉にある二種類のセンサーから生じます。筋紡錘は筋肉の伸び具合を脳に伝え、視覚を使わずに手足の位置を知るのに役立ちます。皮膚の触覚受容器は圧力や質感、接触を検出します。これらは細長い神経束に沿って信号を送り、体内を一本のケーブルのように伝わりながら姿勢、歩行、把持、バランスを静かに制御します。この自然の配線はコンパクトでありながら情報量が豊富であり、機械にも同様の滑らかな感覚を持たせたいと考えるエンジニアにとって大きな示唆を与えます。
平面センサーの限界
多くの研究グループは、プリントや積層された電子回路を用いて平面シート上に人工触覚センサーを作ってきました。これらは圧力や伸張を検出できますが、しばしば1種類の信号に限定されたり、指や足首、ロボットの関節のような曲面に巻き付けるのが難しかったりします。複数のセンシング機能を平面上で組み合わせると、層を重ねたり横に並べたりする必要が生じ、信号の干渉、特定方向への剛性増加、配線や製造の複雑化を招きます。その結果、現在の多くの人工「皮膚」は実際の神経ネットワークが持つ統合的で三次元的な覆いをまだ再現できていません。
二つの感覚を同時に感じる神経のようなファイバー
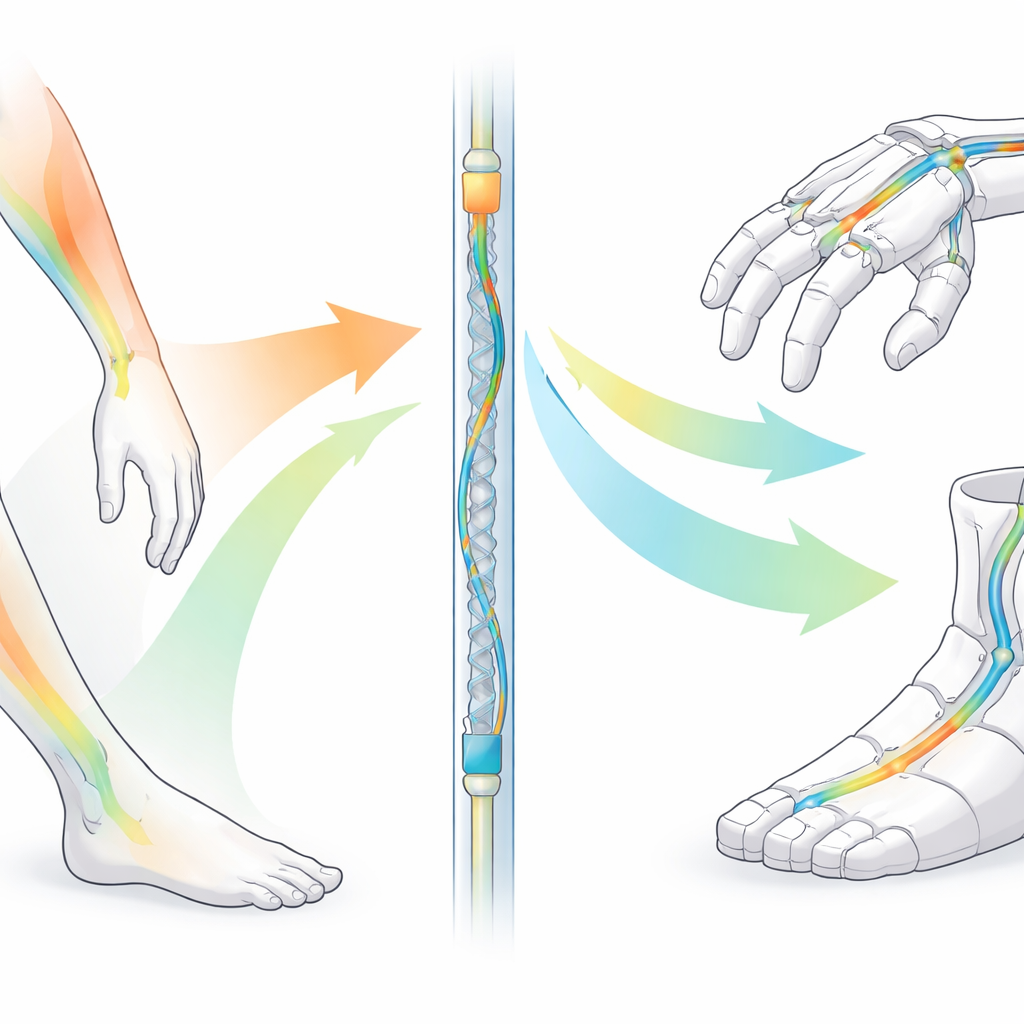
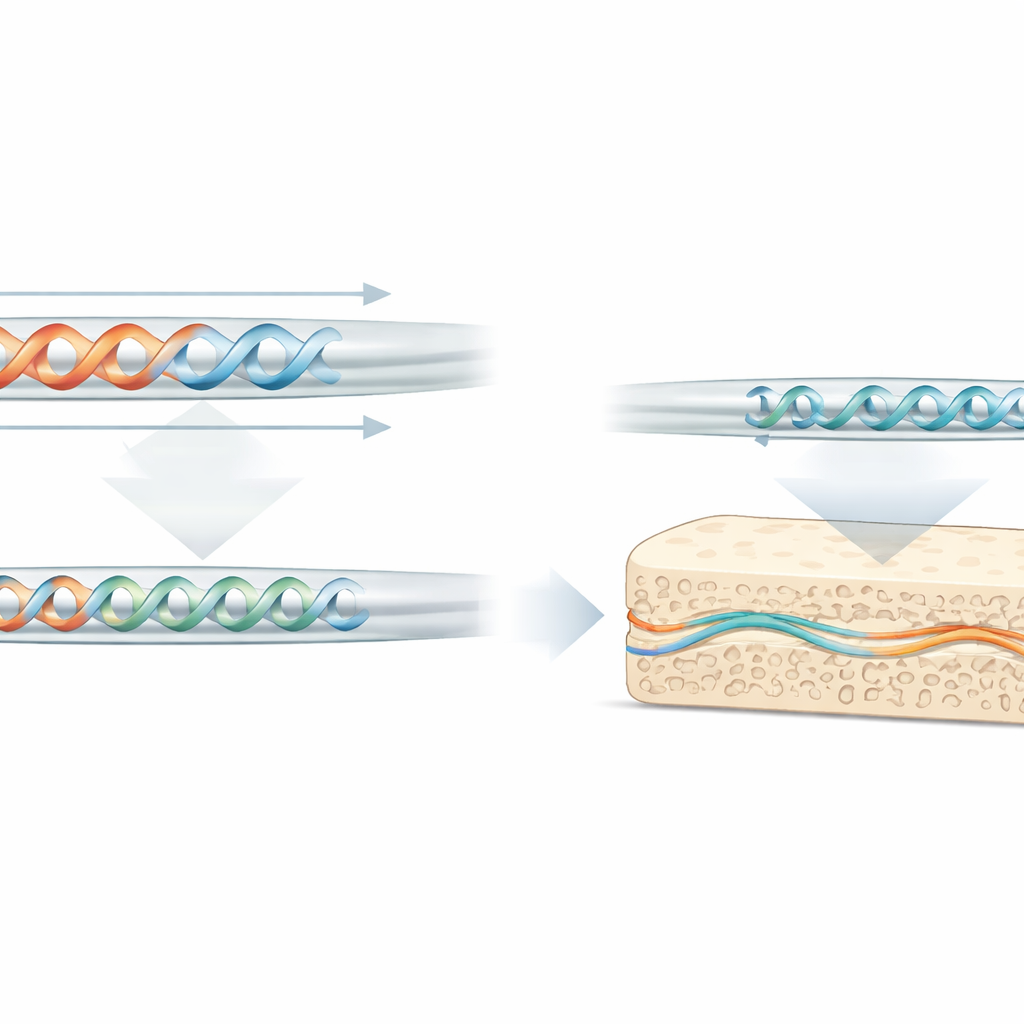
著者らはこの問題に対し、体の一次元的な神経配列を模倣することで取り組みました。彼らは熱引き(光ファイバーを引き出すのに似た)プロセスを用い、複数の材料が精密な断面構造で配列された長く髪の毛程の細さの糸状を作製しました。ファイバーの内部には、人工筋受容器のように働く透明なプラスチックの導波路があり、ばね状に巻かれているためファイバーが伸びると通過する光量が変化します。同じ糸の別の箇所には、導電性粒子で満たされた多孔質ゴムのブロックがあり、これが人工の触覚センサーとして機能します。押されると小さな気孔が潰れて電気抵抗が変化します。伸張信号は光で、圧力信号は電気で伝えるため、二つの感覚は自然に分離されつつも一本の柔軟な“神経様”経路を共有します。
人工神経の性能
チームは感度と確実な光伝送を両立させるため、ファイバーの長さ、コイルの数、コイル径といった形状を慎重に調整しました。試験では、光学部位はファイバーの伸長に応じて明確で再現性のある信号変化を示し、数百回のひずみサイクルを耐えて劣化しませんでした。触覚部位には砂糖テンプレート法を用いて数百マイクロメートル幅の気孔を持つスポンジ状のゴム構造を作り、炭素粒子のネットワークでコーティングしました。この多孔質設計により、圧力センサーは同材料の塊に比べて感度が高く、応答も鈍くならず、数千の押し込み・解放サイクルで安定し、物の把持のような高速動作にも十分な応答性を示しました。
触れることのできるロボットの手と足
これらのファイバーが実際にどのように機能するかを示すため、研究者たちは3Dプリントしたロボットの手足にファイバーを通しました。ペンクリック試験では、ファイバーの「筋肉」部分がロボット指の曲がり具合を追跡し、「皮膚」部分はペンのクリック時に生じる短い圧力スパイクを検出しました。歩行様の動作を行うロボットの足では、あるセットのファイバーが足首やつま先の曲げを監視し、別のセットがかかと、中足部、つま先の圧力を感知しました。これらの信号を組み合わせることで、足が地面に着いた瞬間、荷重の移り変わり、つま先が蹴り出すタイミングといった事象を再構成でき、人間が歩行中に関節と圧力の感覚を統合してバランスを保つのと非常に似た情報を得られました。
将来の機械にとっての意義
要するに、この研究は運動と触覚という二つの重要な感覚を、複雑な3D形状に絡め取れる一本の糸状要素に詰め込むことが可能であることを示しています。ファイバーは柔軟でスケール可能かつ長尺で製造できるため、衣服に織り込んだり、ソフトロボットに埋め込んだり、義肢に巻き付けても余分な嵩や配線を増やさずに済みます。将来的には感 sensing 領域を増やしたり、温度感知要素を加えたりすることで、こうしたファイバーのネットワークが一種の人工神経系を形成する可能性があります。これにより機械やウェアラブル機器は自分の身体や周囲をより人間に近い感覚で捉えられるようになり、制御性や安全性、ヒューマン・マシンインタラクションのリアリズムが向上するでしょう。
引用: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
キーワード: 人工皮膚, 多感覚ファイバー, ロボットの触覚, 固有受容, ソフトロボティクス