Clear Sky Science · ar
ألياف متعددة الحواس مستوحاة من مستقبلات الميكانيك للشعور الاصطناعي
إحساس العالم عبر خيط واحد
تخيل روبوتاً يمكنه أن يشعر بحركاته وضغط المصافحة عبر شيء رفيع ومرن مثل خيط الخياطة. تصف هذه الورقة بحثاً يفعل ذلك تماماً: نوعاً جديداً من الألياف الذكية التي تحاكي طريقة إحساس أعصابنا بالحركة واللمس معاً. يفتح هذا العمل الباب أمام جلود صناعية شبيهة بالحياة، وروبوتات أكثر مرونة، وأجهزة قابلة للارتداء تقرأ حركات الجسم واحتكاكه بالعالم في الزمن الحقيقي.
كيف يشعر جسمنا باللمس والحركة
ينبع إحساسنا بـ«وعي الجسم» من نوعين من الحساسات في الجلد والعضلات. مغازل العضلات تخبر الدماغ بمدى تمدد العضلات، ما يساعدنا على معرفة مكان أطرافنا دون النظر. مستقبلات اللمس في الجلد تسجل الضغط والملمس والتلامس. كلا النوعين يرسلان إشاراتهما عبر حزم عصبية رفيعة تعمل ككابلات أحادية البعد تجري في الجسم، وتنسق الوضعية والمشي والإمساك والتوازن بهدوء. هذا التوصيل الطبيعي مدمج لكنه غني بالمعلومات، ويُلهم المهندسين الراغبين في أن تحس الآلات العالم بسلاسة مشابهة لطريقتنا.
لماذا تقصر الحساسات المسطحة
بنت مجموعات بحثية كثيرة حساسات لمس اصطناعية على صحائف مسطحة باستخدام إلكترونيات مطبوعة أو مكدسة. مع أنها قادرة على اكتشاف الضغط أو الشد، إلا أنها غالباً ما تقتصر على نوع واحد من الإشارة وقد يصعب لفّها حول أسطح منحنية ومفصلية مثل الأصابع والكواحل أو الأطراف الروبوتية. دمج وظائف حسية متعددة على سطح مسطح عادة ما يتطلب تكديس أو ترتيب طبقات بجانب بعضها، ما قد يسبب تداخل الإشارات، ويجعل الجهاز صلباً في اتجاهات معينة، ويعقّد الأسلاك والتصنيع. ونتيجة لذلك، لا يمكن لمعظم «الجلود» الصناعية اليوم أن تضاهي التغطية المتكاملة ثلاثية الأبعاد لشبكات الأعصاب الحقيقية.
ليف شبيه بالعصب يشعر بشيئين في آن واحد
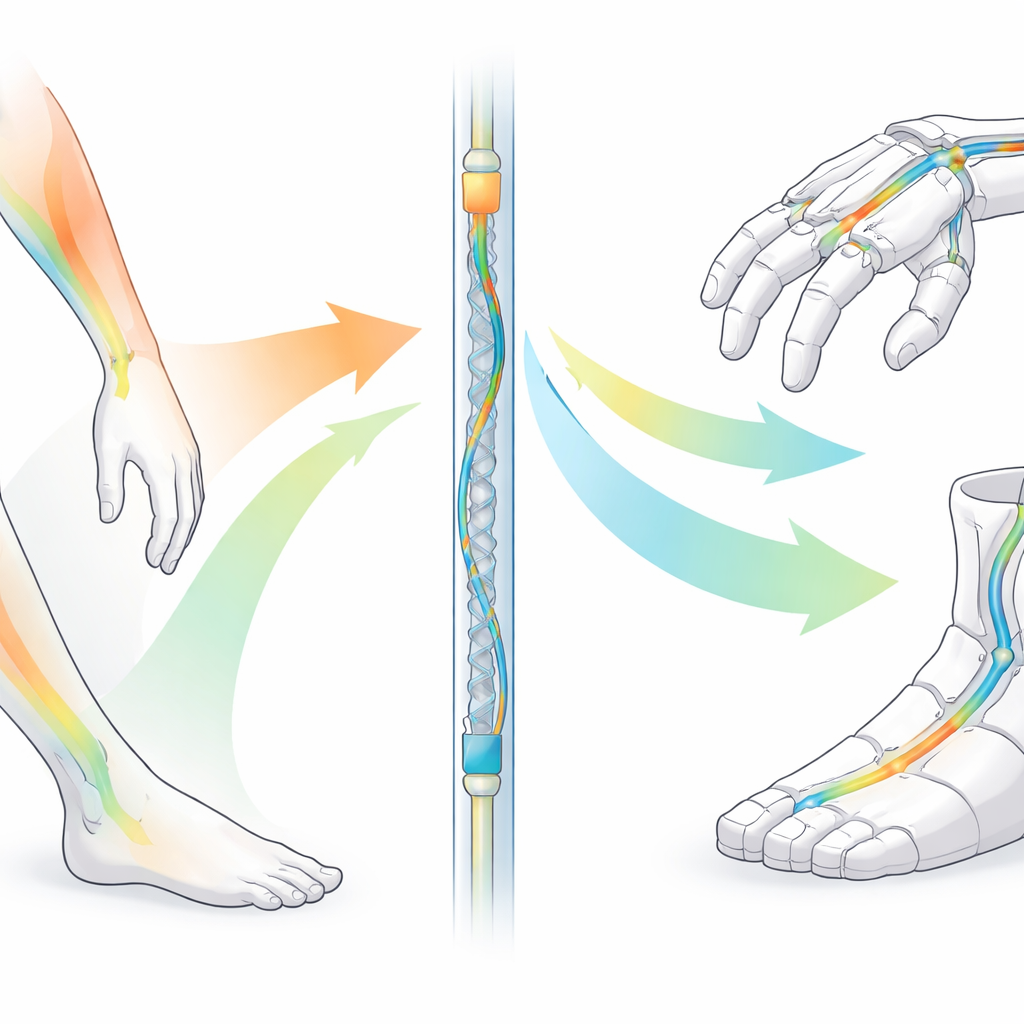
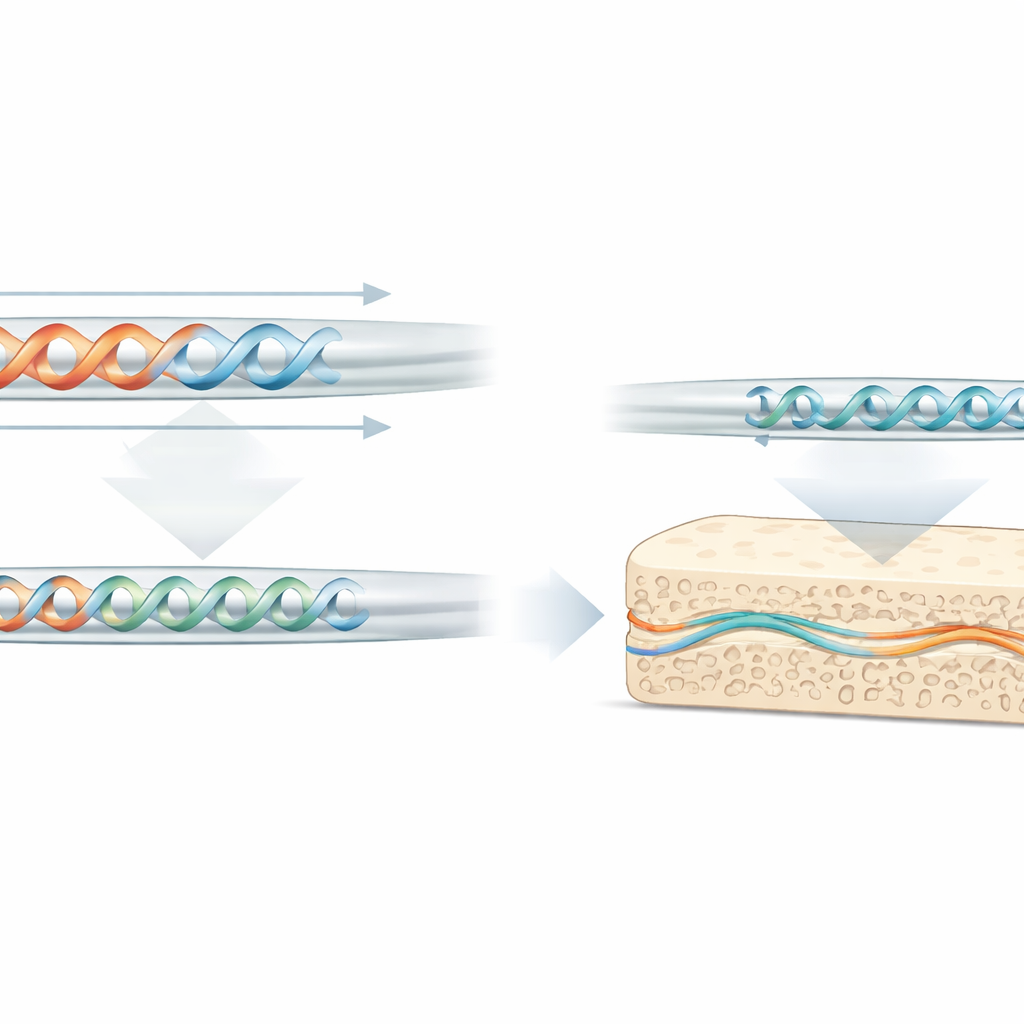
واجه المؤلفون هذه المشكلة بنسخ تخطيط الأعصاب أحادي البعد في الجسم. استخدموا عملية سحب حرارية—مشابهة لسحب ألياف بصرية—لإنشاء خيوط طويلة رفيعة تحتوي على مواد متعددة منظمة في مقطع عرضي دقيق. داخل كل ليف، يعمل موجّه ضوئي بلاستيكي شفاف كحساس عضلي اصطناعي: يُلف على شكل نابض بحيث يؤدي شدّ الليف إلى تغيير كمية الضوء التي تمر. في مكان آخر على نفس الخيط، يعمل كتلة مطاطية مسامية مملوءة بجسيمات موصلة كحساس لمس اصطناعي: الضغط عليها يضغط المسامات الصغيرة ويغير مقاومتها الكهربائية. وبما أن الضوء يتعامل مع إشارة الشد والكهرباء تتعامل مع إشارة الضغط، فإن الحاستين مفصولتان طبيعياً لكنه يتم مشاركتهما عبر مسار واحد مرن «شبيه بالعصب».
مدى أداء الأعصاب الاصطناعية
ضبط الفريق بعناية هندسة الليف—طوله وعدد اللفّات وقطر تلك اللفّات—لموازنة الحساسية مع نقل الضوء الموثوق. في الاختبارات، أظهر الجزء البصري تغيراً واضحاً ومتكرراً في الإشارة عند تمدد الليف، وصمد لمئات دورات الشد دون تدهور. استخدم جزء اللمس طريقة قالب السكر لابتكار بنية مطاطية إسفنجية ذات مسامات بعرض بضع مئات من الميكرومترات، ثم غطاها بشبكة من جسيمات الكربون. جعل هذا التصميم المسامي حساس الضغط أكثر واستجابةً وأقل بُطئاً من كتلة صلبة من نفس المادة، مع بقاء الاستقرار عبر آلاف دورات الضغط والإفراج واستجابة سريعة تكفي للحركات السريعة مثل الإمساك بالأشياء.
أيدي وأقدام روبوتية قادرة على الإحساس
لإظهار كيفية عمل هذه الألياف عملياً، مرّر الباحثون الألياف عبر أيدي وأقدام روبوتية مطبوعة ثلاثية الأبعاد. في اختبار نقر القلم، تتبعت جزء «العضلة» من الليف مدى انحناء إصبع الروبوت، بينما رصد جزء «الجلد» نبضات الضغط القصيرة عند نقر القلم. أثناء حركة تشبه المشي لقدم روبوتية، راقبت مجموعة من الألياف انثناء الكاحل وأصابع القدم، بينما استشعرت مجموعة أخرى الضغط عند الكعب ووسط القدم وأصابع القدم. بدمج هذه الإشارات، تمكن النظام من است reconstrucción متى ضربت القدم الأرض، وكيف انتقل الوزن، ومتى دفعت الأصابع للانطلاق—بشكل يشبه التنسيق الطبيعي بين استشعار المفصل والضغط الذي يحافظ على توازن الإنسان أثناء المشي.
ماذا قد يعني هذا للآلات المستقبلية
بعبارات بسيطة، تُظهر هذه الدراسة أنه من الممكن دمج حاستين رئيسيتين—الحركة واللمس—في عنصر خيطي واحد يمكن أن يمر عبر أشكال ثلاثية الأبعاد معقدة. وبما أن الليف مرن وقابل للتوسيع ويُصنع بطول كبير، فيمكن نسيجه في الملابس أو تضمينه في روبوتات لينة أو لفّه حول أطراف اصطناعية بحجم وأسلاك قليلة. مع مرور الوقت، وبإضافة مناطق استشعارية أكثر أو عناصر حساسة لدرجة الحرارة، يمكن لشبكات من هذه الألياف أن تشكل نوعاً من النظام العصبي الاصطناعي. قد يزوّد هذا الآلات والأجهزة القابلة للارتداء بإحساس أغنى وأكثر شبهاً بالبشر بأجسامها ومحيطها، محسنّاً التحكم والسلامة وواقعية التفاعل بين الإنسان والآلة.
الاستشهاد: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
الكلمات المفتاحية: جلد اصطناعي, ليف متعدد الحواس, لمس روبوتي, الإحساس بمكان الأطراف, الروبوتات اللينة