Clear Sky Science · fr
Fibres multisensorielles inspirées des mécanorécepteurs pour une somesthésie artificielle
Ressentir le monde au travers d’un seul fil
Imaginez un robot capable de percevoir ses propres mouvements et la pression d’une poignée de main grâce à quelque chose d’aussi fin et souple qu’un fil à coudre. Cet article décrit exactement cela : un nouveau type de fibre intelligente qui imite la façon dont nos nerfs détectent à la fois le mouvement et le toucher. Ce travail ouvre la voie à des peaux artificielles réalistes, à des robots plus agiles et à des dispositifs portables transparents capables de lire en temps réel les mouvements du corps et ses contacts avec l’environnement.
Comment notre corps perçoit le toucher et le mouvement
Notre sens de « conscience corporelle » provient de deux types de capteurs dans la peau et les muscles. Les fuseaux neuromusculaires indiquent au cerveau dans quelle mesure les muscles sont étirés, nous aidant à connaître la position de nos membres sans regarder. Les récepteurs tactiles de la peau enregistrent la pression, la texture et le contact. Les deux types transmettent leurs signaux le long de faisceaux nerveux minces qui circulent comme des câbles unidimensionnels dans le corps, coordonnant discrètement la posture, la marche, la préhension et l’équilibre. Ce câblage naturel est compact tout en étant riche en informations, et il inspire les ingénieurs qui souhaitent que les machines perçoivent le monde aussi naturellement que nous.
Pourquoi les capteurs plats montrent leurs limites
De nombreux groupes de recherche ont construit des capteurs tactiles artificiels sur des feuilles plates en utilisant de l’électronique imprimée ou stratifiée. Bien qu’ils puissent détecter la pression ou l’étirement, ils sont souvent limités à un type de signal et peuvent être difficiles à enrouler autour de surfaces courbes ou articulées comme des doigts, des chevilles ou des membres robotiques. Combiner plusieurs fonctions sensorielles sur une surface plane implique généralement d’empiler ou d’aligner de nombreuses couches côte à côte. Cela peut provoquer des interférences entre signaux, rigidifier le dispositif dans certaines directions et compliquer le câblage et la fabrication. En conséquence, la plupart des « peaux » artificielles actuelles ne peuvent toujours pas égaler la couverture intégrée et tridimensionnelle des réseaux nerveux réels.
Une fibre semblable à un nerf qui ressent deux choses à la fois
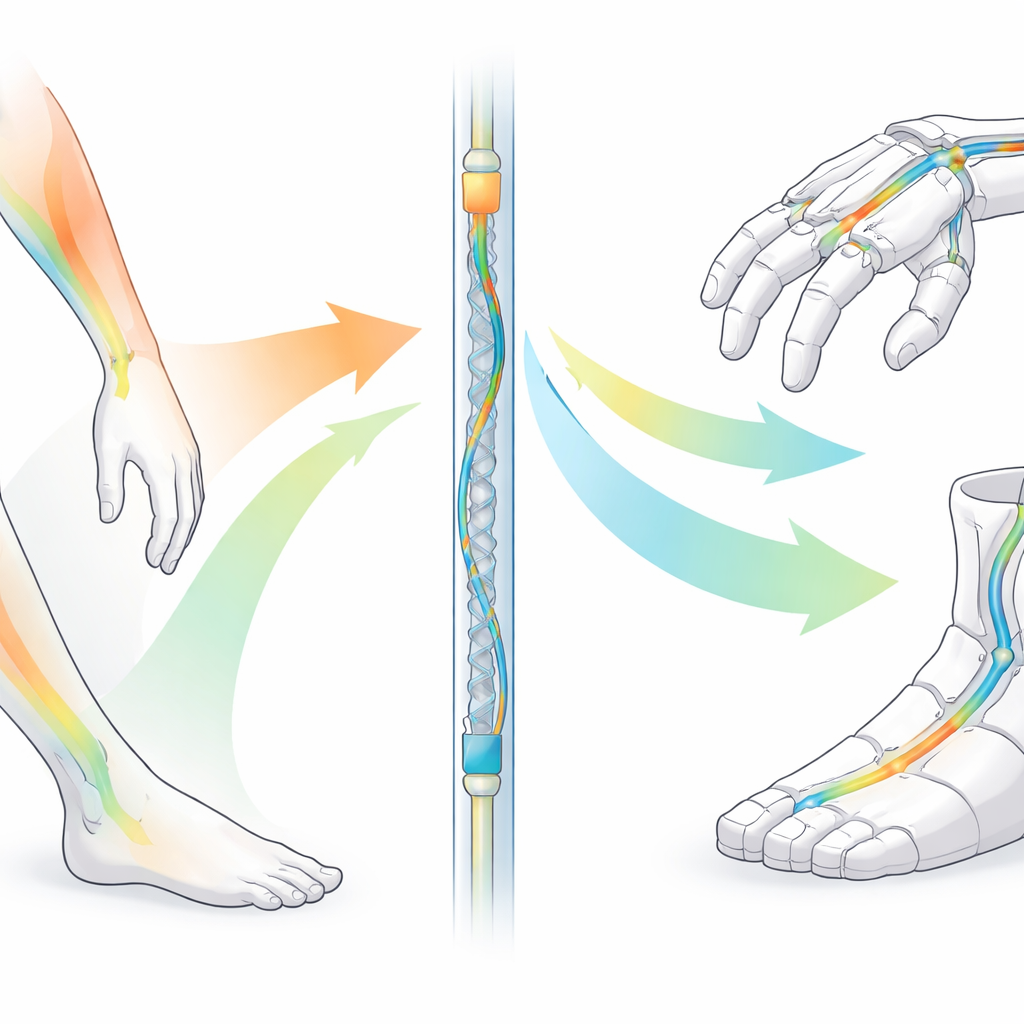
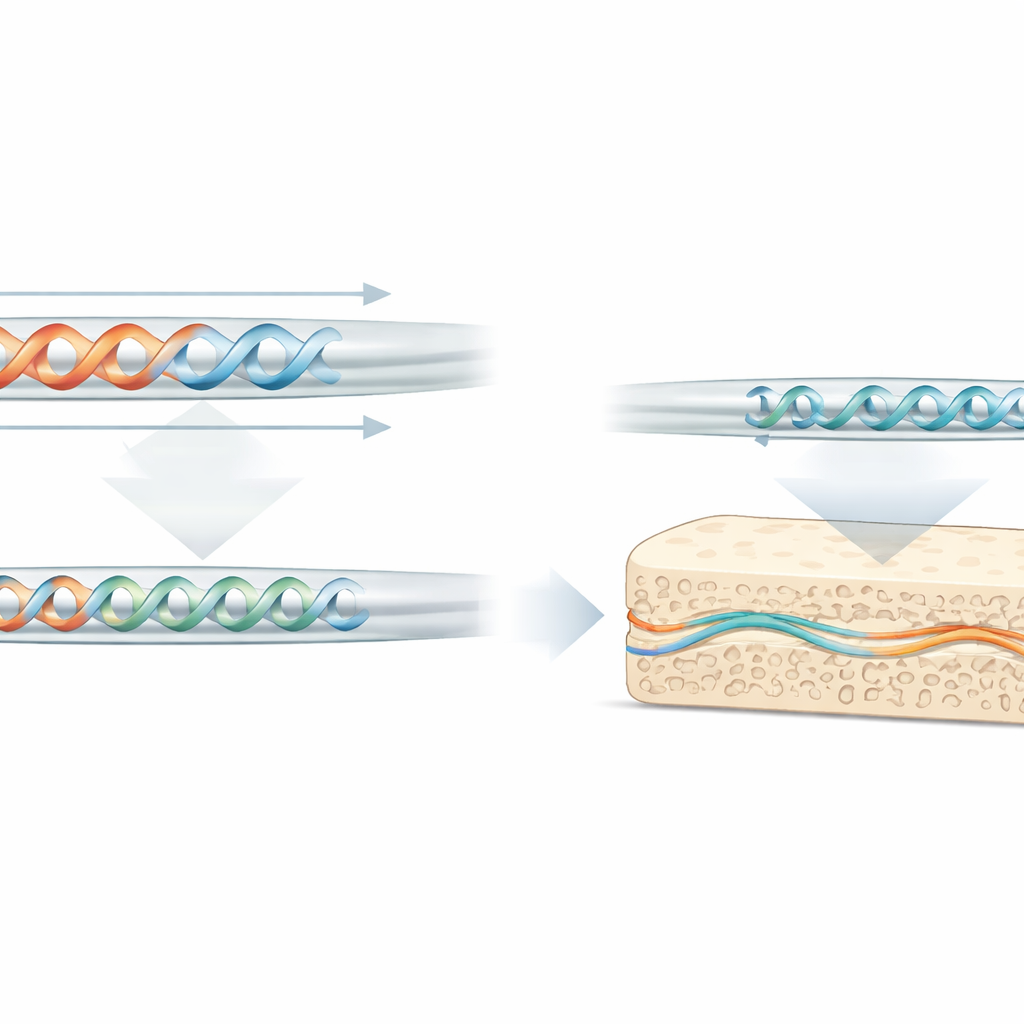
Les auteurs ont abordé ce problème en reproduisant la configuration unidimensionnelle des nerfs du corps. Ils ont utilisé un procédé d’étirage thermique — similaire au tirage de fibres optiques — pour créer de longs brins aussi fins qu’un cheveu contenant plusieurs matériaux organisés dans une section transversale précise. À l’intérieur de chaque fibre, un guide d’ondes en plastique transparent fait office de capteur musculaire artificiel : enroulé en forme de ressort, il modifie la transmission de la lumière lorsque la fibre est étirée. À un autre endroit le long du même brin, un bloc de caoutchouc poreux chargé de particules conductrices joue le rôle de capteur tactile : en appuyant dessus, on comprime les minuscules pores et on fait varier la résistance électrique. Parce que la lumière porte le signal d’étirement et l’électricité porte le signal de pression, les deux sensations sont naturellement séparées tout en partageant un même trajet souple, « similaire à un nerf ».
Performances des nerfs artificiels
L’équipe a soigneusement ajusté la géométrie de la fibre — sa longueur, le nombre de spires et le diamètre de ces spires — pour équilibrer sensibilité et transmission lumineuse fiable. Lors des essais, l’unité optique a montré une variation de signal nette et répétable lors de l’étirement de la fibre, et elle a survécu à des centaines de cycles de déformation sans se dégrader. L’unité tactile a utilisé une méthode par motif de sucre pour créer une structure en caoutchouc semblable à une éponge avec des pores de quelques centaines de micromètres, puis l’a recouverte d’un réseau de particules de carbone. Cette conception poreuse a rendu le capteur de pression beaucoup plus sensible et moins lent qu’un bloc solide du même matériau, tout en restant stable sur des milliers de cycles d’appui-relâchement et en répondant assez vite pour des mouvements rapides comme la saisie d’objets.
Mains et pieds robotiques qui savent ressentir
Pour montrer l’application pratique de ces fibres, les chercheurs les ont acheminées à travers des mains et des pieds robotiques imprimés en 3D. Lors d’un test de clic de stylo, la partie « muscle » de la fibre a suivi l’amplitude de flexion du doigt robotique, tandis que la partie « peau » a capté les brèves pointes de pression lors du clic. Lors d’un mouvement simulant la marche d’un pied robotique, un ensemble de fibres surveillait la flexion de la cheville et des orteils, et un autre ensemble détectait la pression au talon, au médio-pied et à l’orteil. En combinant ces signaux, le système a pu reconstruire le moment de l’impact au sol, le déplacement du poids et le moment de la poussée des orteils — à l’instar de la coordination naturelle des capteurs d’articulation et de pression qui maintient l’équilibre humain lors de la marche.
Ce que cela pourrait signifier pour les machines de demain
En termes simples, cette recherche montre qu’il est possible d’intégrer deux sens clés — le mouvement et le toucher — dans un unique élément filiforme capable de se faufiler à travers des formes 3D complexes. Parce que la fibre est souple, évolutive et fabriquée en longueurs importantes, elle peut être tissée dans des vêtements, intégrée dans des robots mous ou enroulée autour de prothèses avec un encombrement et un câblage minimaux. À terme, en ajoutant davantage de zones sensorielles ou même des éléments sensibles à la température, des réseaux de telles fibres pourraient former une sorte de système nerveux artificiel. Cela offrirait aux machines et aux dispositifs portables une perception plus riche et plus humaine de leur corps et de leur environnement, améliorant le contrôle, la sécurité et le réalisme des interactions homme–machine.
Citation: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Mots-clés: peau artificielle, fibre multisensorielle, toucher robotique, proprioception, robotique douce