Clear Sky Science · en
Mechanoreceptor-inspired multisensory fibers for artificial somatosensation
Feeling the World Through a Single Thread
Imagine a robot that can feel its own movements and the pressure of a handshake through something as thin and flexible as a piece of sewing thread. This paper describes just that: a new kind of smart fiber that mimics how our nerves sense both motion and touch. The work opens the door to lifelike artificial skin, more agile robots, and seamless wearable devices that can read the body’s motions and contact with the world in real time.
How Our Bodies Sense Touch and Motion
Our sense of “body awareness” comes from two kinds of sensors in the skin and muscles. Muscle spindles tell the brain how much muscles are stretched, helping us know where our limbs are without looking. Tactile receptors in the skin register pressure, texture, and contact. Both types send their signals along slender nerve bundles that run like one-dimensional cables through the body, quietly coordinating posture, walking, grasping, and balance. This natural wiring is compact yet rich in information, and it inspires engineers who want machines to sense the world as smoothly as we do.
Why Flat Sensors Fall Short
Many research groups have built artificial touch sensors on flat sheets using printed or layered electronics. While these can detect pressure or stretching, they are often limited to one type of signal and can be hard to wrap around curved, jointed surfaces like fingers, ankles, or robotic limbs. Combining several sensing functions on a flat surface usually means stacking or arranging many layers side by side. This can cause signals to interfere with each other, make the device stiff in certain directions, and complicate wiring and manufacturing. As a result, most artificial “skins” today still cannot match the integrated, three-dimensional coverage of real nerve networks.
A Nerve-Like Fiber That Feels Two Things at Once
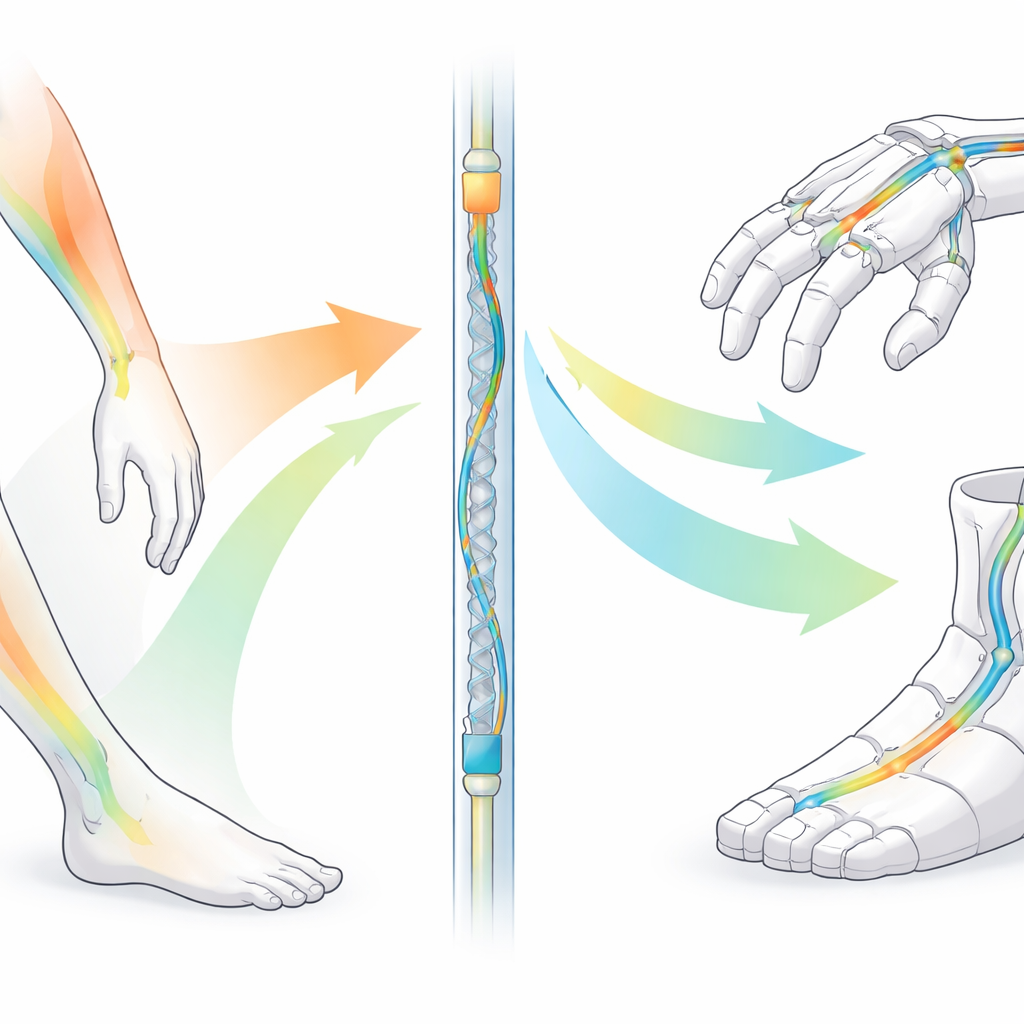
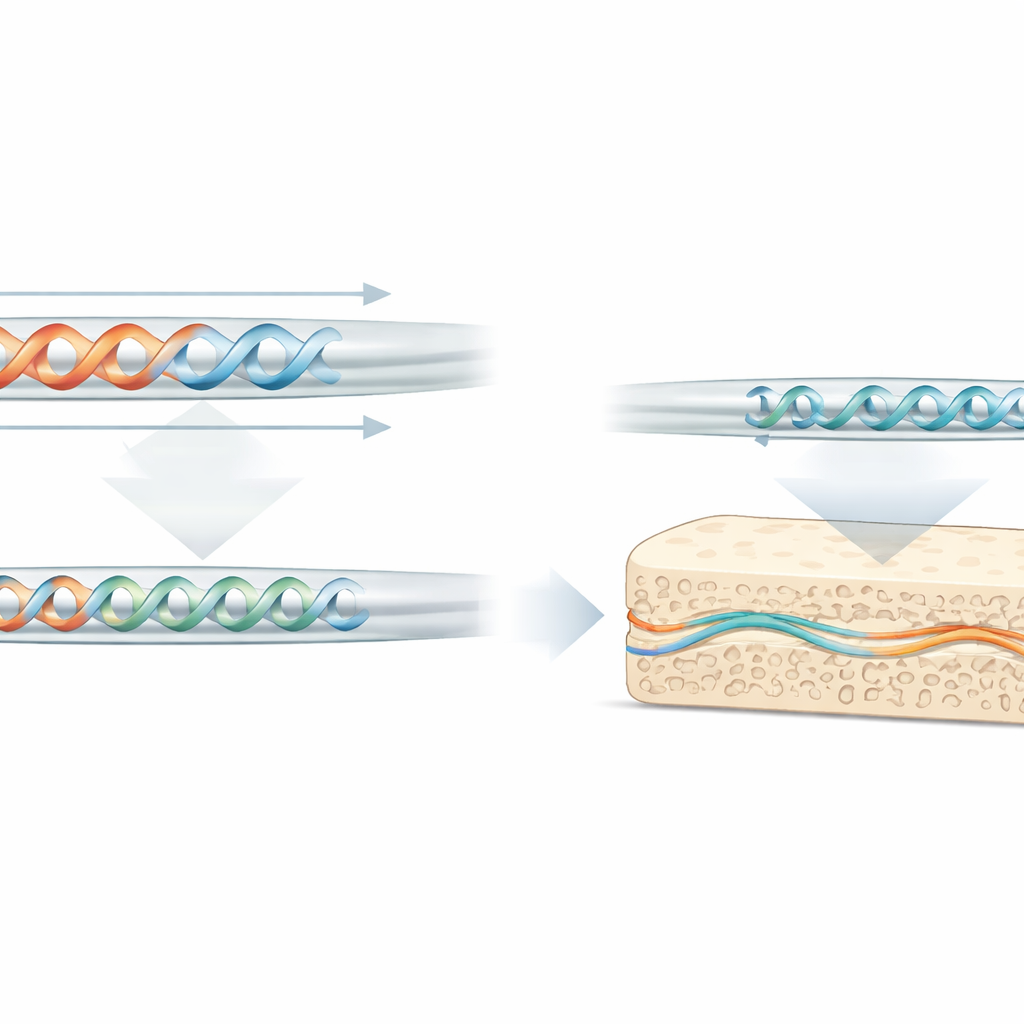
The authors tackled this problem by copying the body’s one-dimensional nerve layout. They used a thermal drawing process—similar to pulling out optical fibers—to create long, hair-thin strands that contain multiple materials organized in a precise cross-section. Inside each fiber, a clear plastic waveguide acts like an artificial muscle sensor: it is coiled into a spring-like shape so that stretching the fiber changes how much light gets through. At another spot along the same strand, a porous rubber block filled with conductive particles acts as an artificial touch sensor: pressing on it squeezes the tiny pores and changes its electrical resistance. Because light handles the stretching signal and electricity handles the pressure signal, the two senses are naturally separated yet share a single, flexible “nerve-like” pathway.
How Well the Artificial Nerves Perform
The team carefully tuned the fiber’s geometry—its length, the number of coils, and the diameter of those coils—to balance sensitivity with reliable light transmission. In tests, the optical unit showed a clear, repeatable change in signal as the fiber was stretched, and it survived hundreds of strain cycles without degrading. The touch unit used a sugar-template method to create a sponge-like rubber structure with pores a few hundred micrometers wide, then coated it with a network of carbon particles. This porous design made the pressure sensor far more sensitive and less sluggish than a solid block of the same material, while staying stable over thousands of press-and-release cycles and responding quickly enough for fast motions like grasping objects.
Robotic Hands and Feet That Can Feel
To show how these fibers work in practice, the researchers threaded them through 3D-printed robotic hands and feet. In a pen-clicking test, the “muscle” part of the fiber tracked how much the robot finger bent, while the “skin” part picked up the brief pressure spikes when the pen was clicked. During a walking-like motion of a robotic foot, one set of fibers monitored ankle and toe bending, and another set sensed pressure at the heel, midfoot, and toe. By combining these signals, the system could reconstruct when the foot struck the ground, how weight shifted, and when the toe pushed off—much like the natural coordination of joint and pressure sensing that keeps humans balanced while walking.
What This Could Mean for Future Machines
In plain terms, this research shows that it is possible to pack two key senses—movement and touch—into a single, thread-like element that can snake through complex 3D shapes. Because the fiber is flexible, scalable, and built in long lengths, it can be woven into clothing, embedded in soft robots, or wrapped around prosthetic limbs with minimal bulk and wiring. Over time, by adding more sensing regions or even temperature-sensitive elements, networks of such fibers could form a kind of artificial nerve system. This could give machines and wearable devices a richer, more human-like sense of their bodies and surroundings, improving control, safety, and the realism of human–machine interaction.
Citation: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Keywords: artificial skin, multisensory fiber, robotic touch, proprioception, soft robotics