Clear Sky Science · tr
Mekanolduyargaya ilham veren çokduyulu lifler ile yapay somatosansasyon
Dün dünyayı tek bir iplikle hissetmek
Bir robotun, dikiş ipliği kadar ince ve esnek bir şey aracılığıyla kendi hareketlerini ve bir el sıkışmasındaki baskıyı hissedebildiğini hayal edin. Bu makale tam da bunu tanımlıyor: hareket ve dokunmayı algılama biçimimizi taklit eden yeni bir tür akıllı lif. Çalışma, gerçekçi yapay deri, daha çevik robotlar ve vücudun hareketlerini ile dünyayla teması gerçek zamanlı olarak okuyabilen kusursuz giyilebilir cihazlar için kapıyı aralıyor.
Vücudumuz dokunma ve hareketi nasıl algılar
“Vücut farkındalığı” duygumuz, deri ve kaslarda bulunan iki tür sensörden gelir. Kas iğcikleri kasların ne kadar gerildiğini beyne bildirir ve böylece uzuvlarımızın nerede olduğunu bakmadan bilmeyi sağlar. Derideki dokunma reseptörleri basıncı, dokuyu ve teması kaydeder. Her iki tür de sinyallerini vücutta bir boyutlu kablolar gibi uzanan ince sinir demetleri boyunca ileterek duruş, yürüme, kavrama ve dengeyi sessizce koordine eder. Bu doğal düzenleme kompakt ama bilgi açısından zengindir ve makinelerin dünyayı bizimkine benzer bir akıcılıkla algılamasını isteyen mühendisleri etkiler.
Neden düz sensörler yetersiz kalıyor
Birçok araştırma grubu, baskılı veya katmanlı elektronikler kullanarak düz tabakalar üzerinde yapay dokunma sensörleri geliştirdi. Bunlar basınç veya gerilmeyi algılayabilse de genellikle tek tip bir sinir türüyle sınırlı kalır ve parmaklar, bilekler veya robotik uzuvlar gibi eğimli, eklemli yüzeylerin etrafına sarılması zor olabilir. Düz bir yüzeye birden fazla algılama işlevi eklemek genellikle katmanların üst üste konmasını veya yan yana düzenlenmesini gerektirir. Bu, sinyallerin birbirine müdahale etmesine, cihazın belirli yönlerde sertleşmesine ve kablolama ile üretimin karmaşıklaşmasına yol açabilir. Sonuç olarak, bugünkü çoğu yapay “deri” hâlâ gerçek sinir ağlarının entegre, üç boyutlu kapsama alanına yetişemiyor.
Aynı anda iki şeyi hissedebilen sinir benzeri bir lif
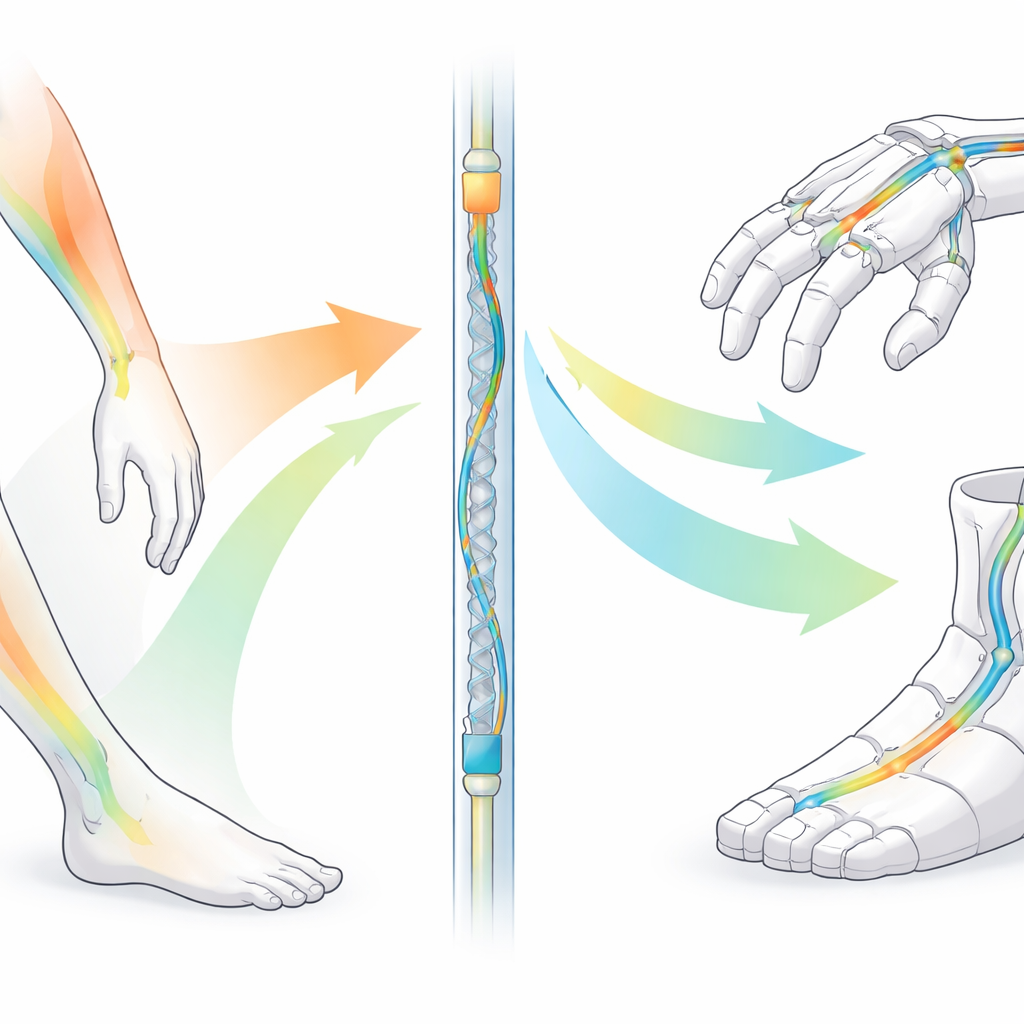
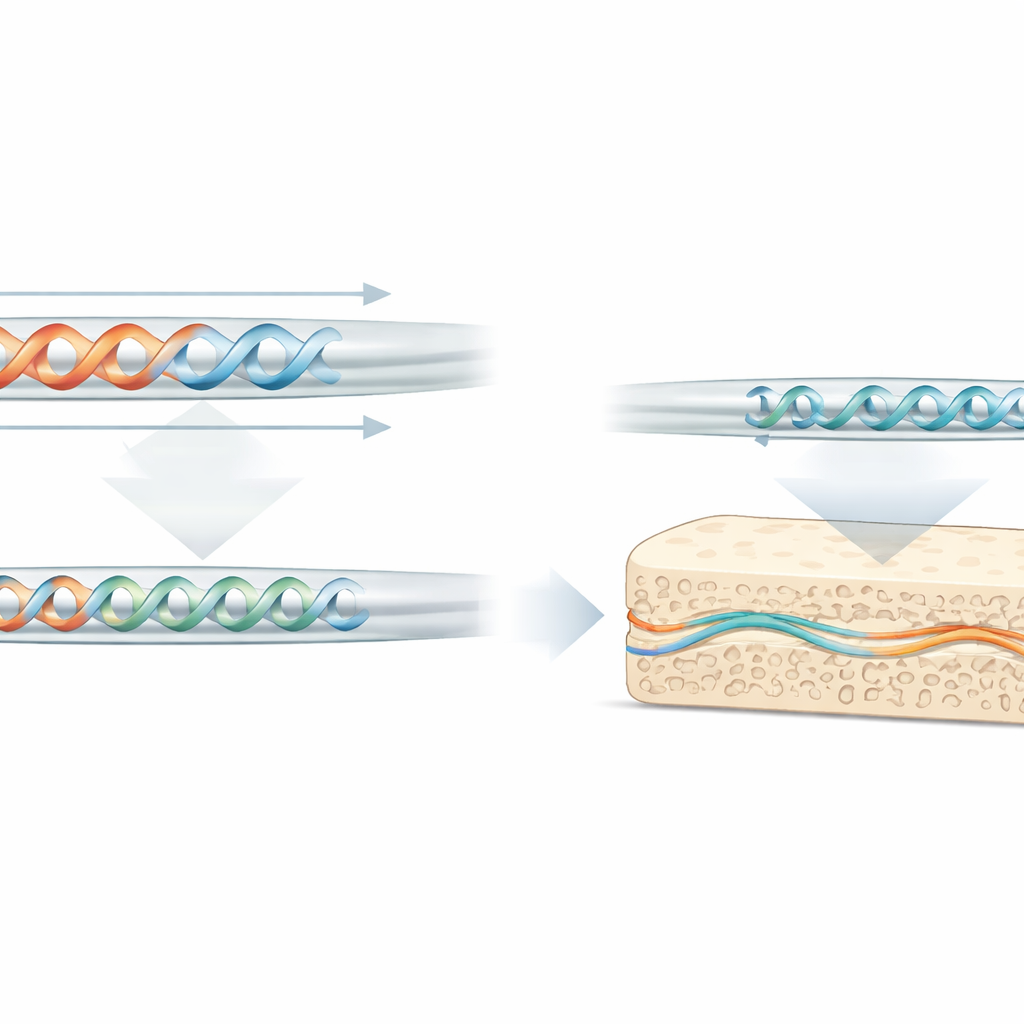
Yazarlar bu sorunu vücudun bir boyutlu sinir düzenini kopyalayarak ele aldı. Optik fiber çekmeye benzer bir termal çekim süreci kullanarak, kesitinde çoklu malzemelerin hassas bir biçimde düzenlendiği uzun, kıl inceliğinde iplikler ürettiler. Her lifin içinde, yapay bir kas sensörü gibi davranan şeffaf bir plastik dalga kılavuzu bulunuyor: lif gerildiğinde geçen ışık miktarı değişecek şekilde yay benzeri bir şekle sarılmış. Aynı iplik boyunca başka bir noktada ise iletken partiküllerle doldurulmuş gözenekli bir kauçuk blok yapay bir dokunma sensörü görevi görüyor: üzerine basıldığında küçük gözenekler sıkışır ve elektriksel direnci değişir. Işığın gerilme sinyalini, elektriğin ise basınç sinyalini taşıması sayesinde iki algı doğal olarak ayrışıyor fakat tek, esnek bir “sinir-benzeri” yol boyunca paylaşılıyor.
Yapay sinirler ne kadar iyi performans gösteriyor
Takım, lifin geometrisini—uzunluğunu, bobin sayısını ve bu bobinlerin çapını—duyarlılığı güvenilir ışık iletimi ile dengelemek için dikkatle ayarladı. Testlerde optik ünite, lif gerildiğinde belirgin ve tekrarlanabilir bir sinyal değişimi gösterdi ve yüzlerce gerilme döngüsüne dayanarak bozulmadı. Dokunma ünitesi, birkaç yüz mikrometre genişliğinde gözeneklere sahip süngerimsi bir kauçuk yapı oluşturmak için şeker-kalıp yöntemini kullandı ve ardından karbon parçacıklarıyla bir ağ kapladı. Bu gözenekli tasarım, basınç sensörünü aynı malzemenin katı bir bloğuna kıyasla çok daha hassas ve daha az yavaş tepki veren hale getirdi; ayrıca binlerce basıp-bırakma döngüsü boyunca kararlı kaldı ve nesneleri kavramak gibi hızlı hareketler için yeterince hızlı yanıt verdi.
Hissedebilen robotik eller ve ayaklar
Bu liflerin pratikte nasıl çalıştığını göstermek için araştırmacılar onları 3B baskılı robotik el ve ayakların içinden geçirdiler. Bir kalem tıklatma testinde, lifin “kas” bölümü robot parmağın ne kadar büküldüğünü izlerken, “deri” bölümü kalem tıklatıldığında ortaya çıkan kısa basınç zirvelerini yakaladı. Bir robot ayağının yürümeye benzer hareketinde, bir grup lif bilek ve parmak bükülmesini izlerken, başka bir grup topuk, orta ayak ve parmaktaki basıncı algıladı. Bu sinyalleri birleştirerek sistem, ayağın zemine ne zaman değdiğini, ağırlığın nasıl kaydığını ve parmağın ne zaman ittiğini yeniden inşa edebildi—insanların yürürken dengeyi korumasını sağlayan eklem ve basınç algısının doğal koordinasyonuna çok benzer bir biçimde.
Bu gelecekteki makineler için ne anlama gelebilir
Düz ifadeyle, bu araştırma iki ana duyuyu—hareket ve dokunmayı—karmaşık üç boyutlu şekiller içinde kıvrılabilen tek bir iplik benzeri elemanın içine sığdırmanın mümkün olduğunu gösteriyor. Lif esnek, ölçeklenebilir ve uzun uzunluklarda üretilebilir olduğundan; giysilere dokunabilir, yumuşak robotlara gömülebilir veya protez uzuvların etrafına minimum hacim ve kablolama ile sarılabilir. Zamanla daha fazla algılama bölgesi veya hatta sıcaklığa duyarlı elemanlar eklenerek, bu tür liflerin ağları yapay bir sinir sistemi oluşturabilir. Bu, makinelere ve giyilebilir cihazlara kendi bedenleri ve çevreleri hakkında daha zengin, insan benzeri bir his kazandırarak kontrolü, güvenliği ve insan–makine etkileşiminin gerçekçiliğini artırabilir.
Atıf: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Anahtar kelimeler: yapay deri, çokduyulu lif, robotik dokunma, propriosepsiyon, yumuşak robotik