Clear Sky Science · he
סיבים רב-חושיים בהשראת מקלטי מנגנון למישוש מלאכותי
להרגיש את העולם דרך חוט יחיד
דמיינו רובוט שיכול להרגיש את תנועותיו ואת לחץ הלחיצה של לחיצת יד דרך משהו דק וגמיש כמו חוט תפירה. מאמר זה מתאר בדיוק את זה: סוג חדש של סיב חכם המדמה את האופן שבו העצבים שלנו חשים גם תנועה וגם מגע. העבודה פותחת דלת לעור מלאכותי דמוי-חיים, לרובוטים זריזים יותר ולמכשירים נשאים חלקים היכולים לקרוא בזמן אמת את תנועות הגוף והמגע עם העולם.
כיצד גופנו חווה מגע ותנועה
תחושת "ההכרה בגוף" שלנו נובעת משני סוגי חיישנים בעור ובשרירים. ספינדלים בשריר מודיעים למוח עד כמה השרירים נמתחים, ועוזרים לנו לדעת היכן גפינו מבלי להסתכל. קצוות מישוש בעור רושמים לחץ, מרקם ומגע. שני הסוגים שולחים את אותותיהם לאורך צרורות עצביות דקיקות הרצות כמו כבלים חד-ממדיים בגוף, ומתאמות בשקט יציבה, הליכה, אחיזה ושיווי משקל. החיווט הטבעי הזה קומפקטי אך עשיר במידע, ומהווה מקור השראה למהנדסים המבקשים שהמכונות יחושו את העולם בצורה חלקה כמו אנחנו.
מדוע חיישנים שטוחים לא מספיקים
קבוצות מחקר רבות בנו חיישני מגע מלאכותיים על גיליונות שטוחים באמצעות אלקטרוניקה מודפסת או מרובת שכבות. אמנם אלה יכולים לזהות לחץ או מתיחה, אך לרוב מוגבלים לסוג אות אחד ויכולים להיות קשים לעטיפה סביב משטחים מעוקלים ומפרקיים כמו אצבעות, קרסוליים או גפיים רובוטיות. שילוב כמה פונקציות חיישן על משטח שטוח בדרך כלל דורש ערימה או מיקום שכבות זו לצד זו. הדבר עלול לגרום להפרעות בין האותות, להקשיח את המכשיר בכיוונים מסוימים ולהקשות על הכבלים והייצור. כתוצאה מכך, רוב ה"עורות" המלאכותיים כיום עדיין אינם משיגים את הכיסוי המובנה התלת־ממדי של רשתות העצבים האמיתיות.
סיב דמוי עצב שחווה שתי תחושות בו זמנית
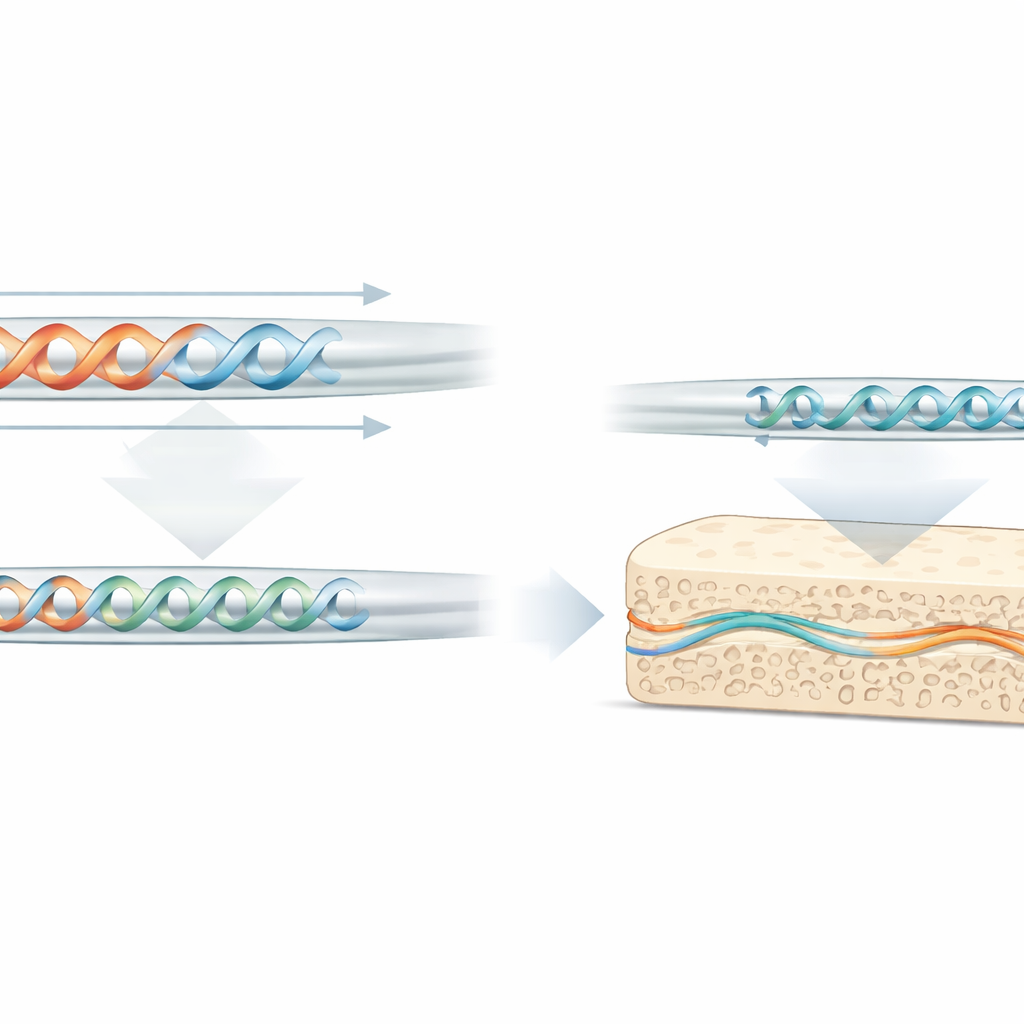
המחברים התמודדו עם הבעיה על ידי העתקת פריסת העצבים החד־ממדית של הגוף. הם השתמשו בתהליך של משיכה תרמית — בדומה להפקת סיבי אופטי — ליצירת סיבים ארוכים ודקים המכילים מספר חומרים הממוינים בחיתוך רוחב מדויק. בתוך כל סיב, נתיב פלסטי שקוף משמש כחיישן שריר מלאכותי: הוא מְסֻלָּסל לצורת קפיץ כך שמתיחת הסיב משנה את כמות האור העובר דרכו. בנקודה אחרת לאורך אותו חוט, בלוק גומי נקבובי הממולא חלקיקים מוליכים פועל כחיישן מגע מלאכותי: לחיצה עליו דוחסת את הנקבוביות הקטנות ומשנה את ההתנגדות החשמלית שלו. מכיוון שהאור מטפל באות המתיחה והחשמל מטפל באות הלחץ, שני החושים מופרדים באופן טבעי אך משתפים נתיב גמיש יחיד דמוי עצב.
כיצד מתפקדים העצבים המלאכותיים
הצוות כיול בקפידה את הגיאומטריה של הסיב — אורכו, מספר הסלילים וקוטרן — כדי לאזן בין רגישות להעברה מהימנה של אור. במבחנים, היחידה האופטית הראתה שינוי אות ברור וניתן לחזרה בזמן שהסיב נמתח, והיא שרדה מאות מחזורי מתיחה ללא הידרדרות. יחידת המגע השתמשה בשיטת תבנית סוכר ליצירת מבנה גומי ספוגי עם נקבוביות ברוחב של כמה מאות מיקרומטרים, ואז צפוייה ברשת של חלקיקי פחמן. העיצוב הנקבובי הזה הפך את חיישן הלחץ לרגיש בהרבה ופחות איטי מחסום מוצק מאותו חומר, תוך שמירה על יציבות לאורך אלפי מחזורי לחיצה ושחרור ותגובה מהירה מספיק לתנועות מהירות כמו אחיזת חפצים.
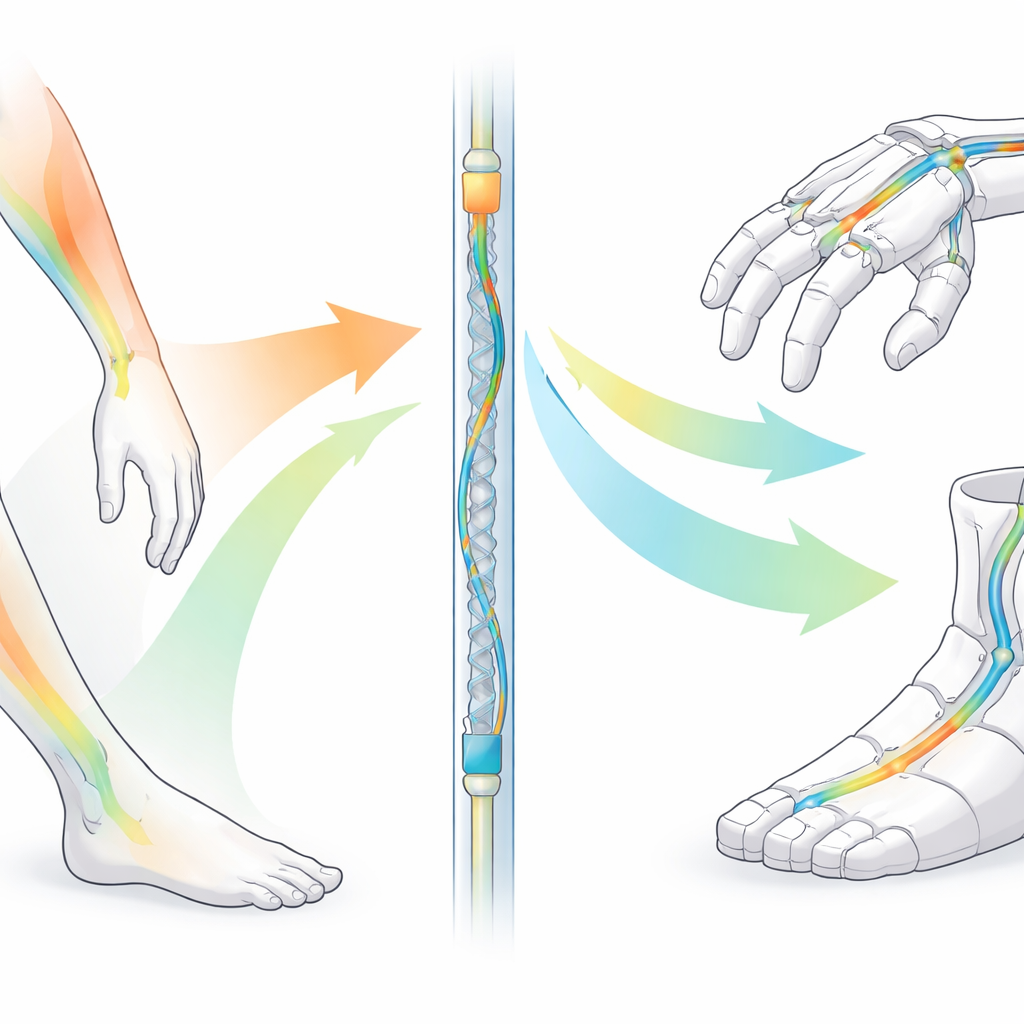
ידיים ורגליים רובוטיות שיכולות לחוש
כדי להדגים כיצד הסיבים פועלים במציאות, החוקרים העבירו אותם דרך ידיים ורגליים רובוטיות שהודפסו בתלת־ממד. במבחן הקשה בעט, חלק ה"שריר" של הסיב עקב את כיפוף אצבע הרובוט, בעוד שהחלק ה"עור" זיהה את קפיצות הלחץ הקצרות כשנלחצה העט. במהלך תנועה המדמה הליכה של רגל רובוטית, סט אחד של סיבים ניטר את כיפוף הקרסול והבהונות, וסט אחר חיש את הלחץ בעקב, בקשת ובעקב האצבע. באמצעות שילוב אותות אלו, המערכת יכלה לשחזר מתי הרגל נגעה בקרקע, כיצד המשקל הועבר ומתי האצבע דחפה — בדומה לתיאום הטבעי של חישת מפרקים ולחץ השומר על שיווי משקל בזמן ההליכה.
מה משמעות הדבר עבור מכונות לעתיד
במילים פשוטות, המחקר מראה שאפשר לארוז שני חושים מרכזיים — תנועה ומגע — באלמנט דמוי חוט יחיד שיכול להיתלש דרך צורות תלת־ממד מורכבות. מאחר שהסיב גמיש, ניתן להרחבה ונבנה באורכים ארוכים, אפשר לשזרו לתוך בגדים, להטמיעו ברובוטים רכים או לעטוף סביב גפיים תותבות עם נפח וחיווט מינימליים. עם הזמן, בהוספת אזורי חישה נוספים ואפילו רכיבים רגישים לטמפרטורה, רשתות של סיבים כאלה יכולות ליצור סוג של מערכת עצבים מלאכותית. הדבר יכול להעניק למכונות ולמכשירים נשאים תחושת גוף וסביבה עשירה יותר ודמוית-אנושית, ולשפר שליטה, בטיחות וריאליזם באינטראקציה בין אדם למכונה.
ציטוט: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
מילות מפתח: עור מלאכותי, סיב רב-חושי, מגע רובוטי, פרופריוספציה, רובוטיקה רכה