Clear Sky Science · ru
Мультисенсорные волокна, вдохновлённые механорецепторами, для искусственной соматосенсации
Ощущая мир через одну нить
Представьте робота, который способен чувствовать собственные движения и давление рукопожатия через нечто тонкое и гибкое, как швейная нитка. В этой статье описан именно такой прибор: новый тип «умного» волокна, имитирующего то, как наши нервы воспринимают и движение, и прикосновение. Работа открывает путь к реалистичной искусственной коже, более подвижным роботам и бесшовным носимым устройствам, которые в реальном времени считывают движения тела и контакт с окружающим миром.
Как наше тело чувствует прикосновения и движение
Наше ощущение «осведомлённости о теле» обеспечивают два типа сенсоров в коже и мышцах. Мышечные веретёна сообщают мозгу, насколько растянуты мышцы, помогая нам знать положение конечностей без взгляда. Тактильные рецепторы в коже фиксируют давление, текстуру и контакт. Оба типа передают сигналы по тонким пучкам нервов, которые проходят по телу как одномерные кабели, тихо координируя позу, ходьбу, хват и равновесие. Такое природное «проводное» решение компактно и информативно, и оно вдохновляет инженеров, стремящихся дать машинам плавное восприятие мира наподобие нашего.
Почему плоские сенсоры недостаточны
Многие исследовательские группы создавали искусственные сенсоры прикосновения на плоских листах с использованием печатной или многослойной электроники. Хотя такие решения могут обнаруживать давление или растяжение, они часто ограничены одним типом сигнала и неудобны для обёртывания вокруг изогнутых или сочленённых поверхностей — пальцев, щиколоток или роботизированных суставов. Совмещение нескольких функций на плоской поверхности обычно требует наслаивания или размещения множества слоёв рядом друг с другом. Это может приводить к взаимным помехам сигналов, делать устройство жёстким в определённых направлениях и осложнять проводку и производство. В результате большинство современных искусственных «кож» по-прежнему не достигают интегрированного, трёхмерного охвата настоящих нервных сетей.
Нервоподобное волокно, которое чувствует два сигнала одновременно
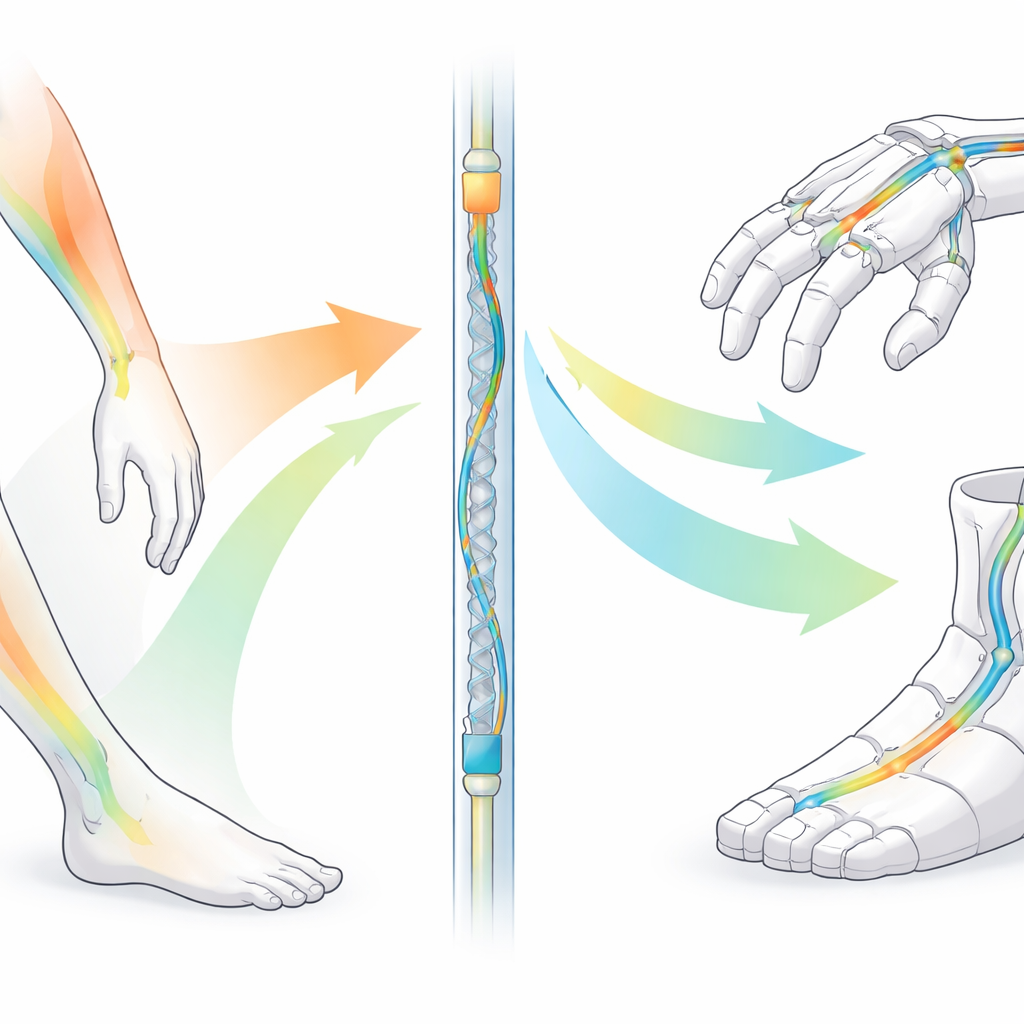
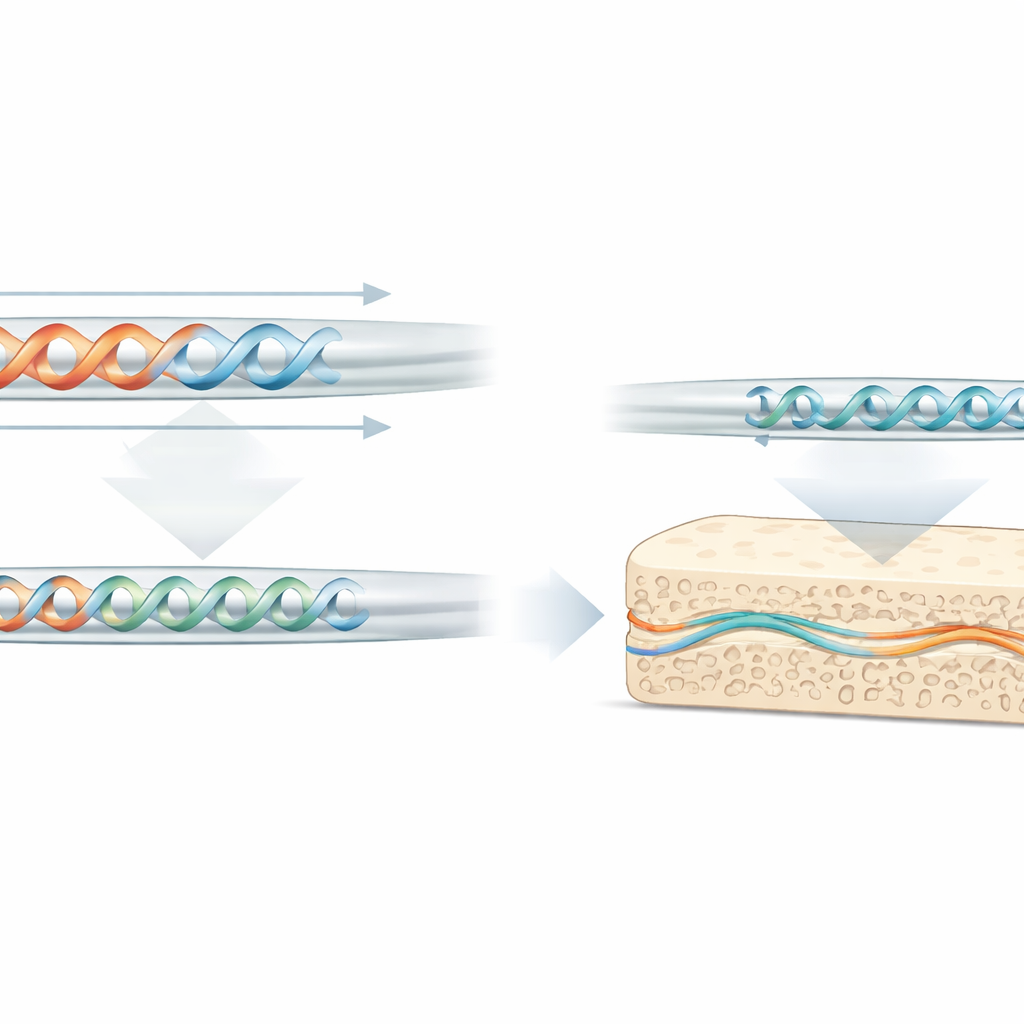
Авторы решили эту проблему, скопировав одномерную нервную архитектуру тела. Они применили процесс термической вытяжки — похожий на производство оптических волокон — чтобы получить длинные, волосоподобные нити, содержащие несколько материалов, организованных в точном поперечном сечении. Внутри каждого волокна прозрачный пластиковый волновод выполняет роль искусственного сенсора мышцы: он скручен в пружинящую форму так, что при растяжении волокна изменяется пропускание света. В другом участке той же нити пористый резиновый блок, заполненный проводящими частицами, служит искусственным сенсором прикосновения: при нажатии поры сжимаются и меняют электрическое сопротивление. Поскольку растяжение кодируется светом, а давление — электричеством, два вида чувствительности естественным образом разделены, но при этом проходят по единому гибкому «нервоподобному» каналу.
Насколько хорошо работают эти искусственные нервы
Команда тщательно настроила геометрию волокна — длину, число витков и диаметр этих витков — чтобы сбалансировать чувствительность и надёжную передачу света. В тестах оптический модуль показывал чёткое, повторяемое изменение сигнала при растяжении волокна и выдерживал сотни циклов деформации без деградации. Тактильный модуль был изготовлен методом с сахарным шаблоном для получения губчатой резиновой структуры с порами размером в несколько сотен микрометров, после чего его покрыли сетью углеродных частиц. Такая пористая конструкция сделала сенсор давления значительно более чувствительным и менее инертным по сравнению с монолитным блоком того же материала, при этом он оставался стабильным на тысячах циклов нажатия и освобождения и реагировал достаточно быстро для быстрых движений, таких как захват предметов.
Роботизированные руки и ступни, которые могут чувствовать
Чтобы продемонстрировать практическое применение волокон, исследователи продрали их через напечатанные на 3D-принтере роботизированные руки и ступни. В тесте со щелчком ручкой «мышечная» часть волокна отслеживала, насколько согнулся роботизированный палец, а «кожная» часть фиксировала кратковременные пики давления при щелчке. При имитации шага роботизированной ступнёй один набор волокон контролировал сгибание голеностопа и пальцев, а другой — давление в пятке, среднем отделе и у пальцев. Комбинируя эти сигналы, система могла реконструировать момент касания подошвы о землю, смещение нагрузки и отталкивание пальцев — очень похоже на естественную координацию суставного и тактильного восприятия, которая удерживает человека в равновесии при ходьбе.
Что это может означать для будущих машин
Проще говоря, это исследование демонстрирует возможность упаковать два ключевых чувства — движение и прикосновение — в едином нитевидном элементе, который может пролегать по сложным трёхмерным формам. Поскольку волокно гибкое, масштабируемое и производится в длинных отрезках, его можно вплетать в одежду, встраивать в мягких роботов или оборачивать вокруг протезов с минимальным объёмом и проводкой. Со временем, добавляя больше сенсорных участков или даже элементы, чувствительные к температуре, сети подобных волокон могли бы образовать своего рода искусственную нервную систему. Это подарило бы машинам и носимым устройствам более богатое, человекоподобное ощущение собственного тела и окружения, улучшая управление, безопасность и реализм взаимодействия человека и техники.
Цитирование: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Ключевые слова: искусственная кожа, мультисенсорное волокно, роботическое осязание, проприоцепция, мягкая робототехника