Clear Sky Science · it
Fibre multisensoriali ispirate ai meccanorecettori per la somatosensazione artificiale
Sentire il mondo attraverso un unico filo
Immaginate un robot che possa percepire i propri movimenti e la pressione di una stretta di mano attraverso qualcosa sottile e flessibile come un filo da cucito. Questo articolo descrive proprio questo: una nuova categoria di fibra intelligente che imita il modo in cui i nostri nervi percepiscono sia il movimento sia il tatto. Il lavoro apre la strada a una pelle artificiale più realistica, robot più agili e dispositivi indossabili integrati che possono leggere in tempo reale i movimenti del corpo e i contatti con l’ambiente.
Come il corpo percepisce tatto e movimento
La nostra sensazione di “consapevolezza corporea” deriva da due tipi di sensori nella pelle e nei muscoli. I fusi neuromuscolari informano il cervello su quanto i muscoli sono allungati, aiutandoci a sapere dove sono gli arti senza guardare. I recettori tattili nella pelle registrano pressione, texture e contatto. Entrambi i tipi trasmettono segnali lungo sottili fasci nervosi che scorrono come cavi unidimensionali nel corpo, coordinando silenziosamente postura, camminata, presa ed equilibrio. Questa cablatura naturale è compatta ma ricca di informazioni, ed è fonte di ispirazione per gli ingegneri che vogliono far percepire il mondo alle macchine con la stessa naturalezza che abbiamo noi.
Perché i sensori piatti non bastano
Molti gruppi di ricerca hanno costruito sensori tattili artificiali su lastre piatte usando elettronica stampata o stratificata. Sebbene possano rilevare pressione o estensione, spesso sono limitati a un solo tipo di segnale e possono essere difficili da avvolgere attorno a superfici curve e articolate come dita, caviglie o arti robotici. Combinare più funzioni sensoriali su una superficie piana di solito significa impilare o disporre molti strati affiancati. Questo può causare interferenze tra i segnali, rendere il dispositivo rigido in determinate direzioni e complicare cablaggio e produzione. Di conseguenza, la maggior parte delle “pelli” artificiali odierne non riesce ancora a eguagliare la copertura integrata e tridimensionale delle reti nervose reali.
Una fibra simile a un nervo che percepisce due cose contemporaneamente
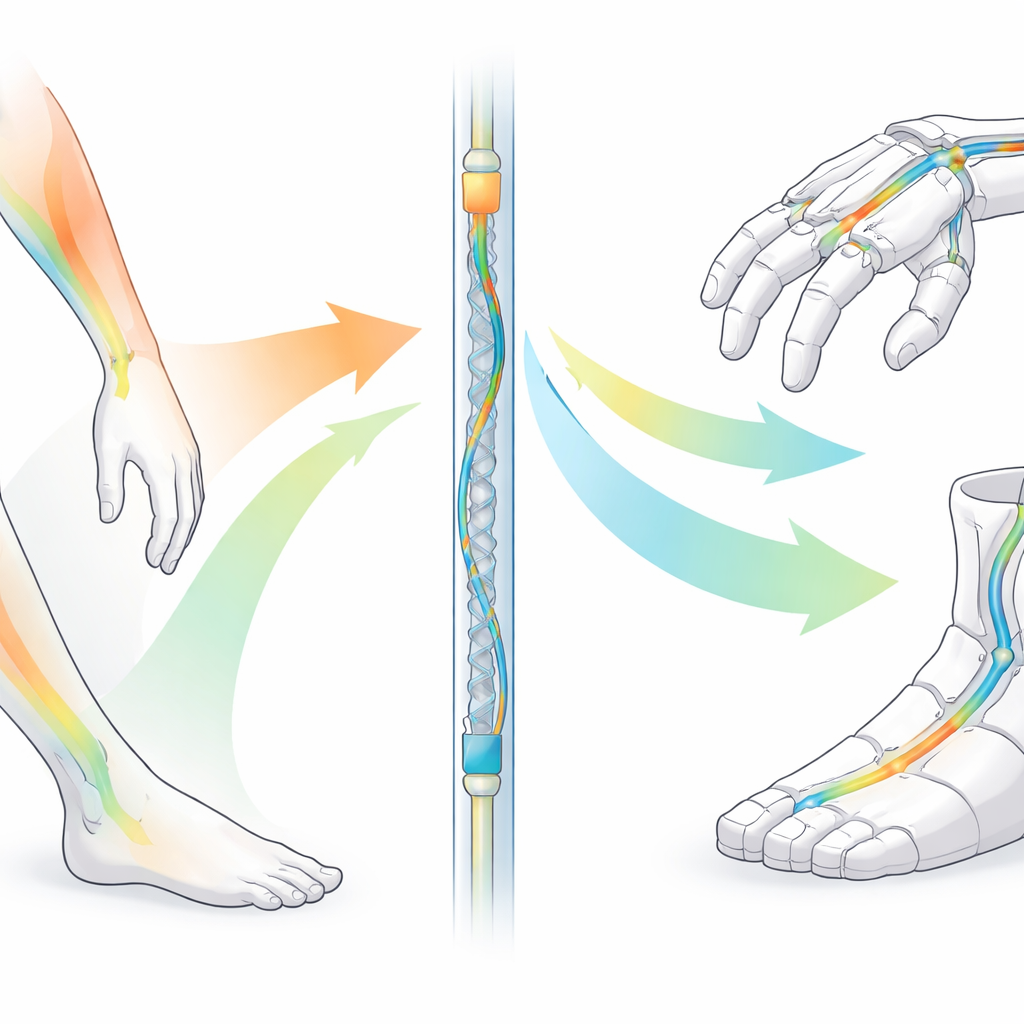
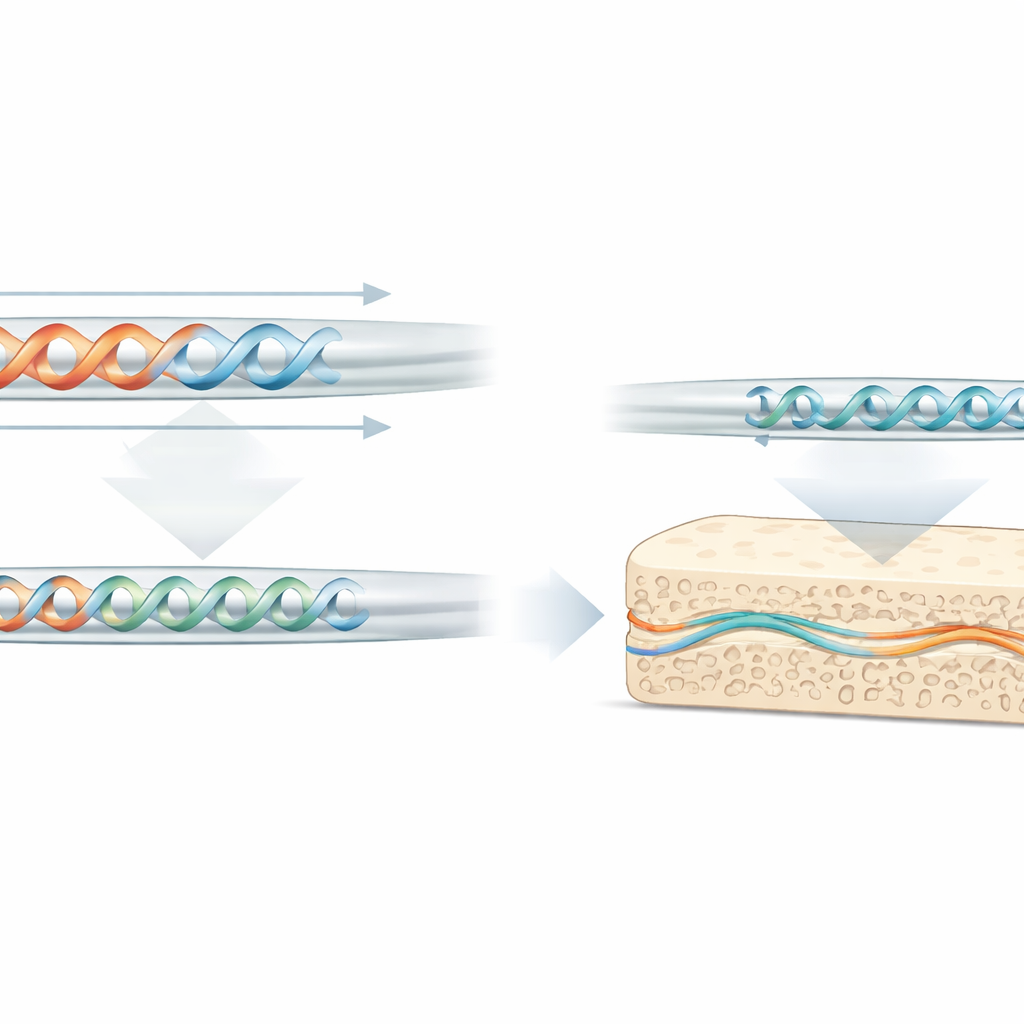
Gli autori hanno affrontato questo problema copiando l’architettura unidimensionale dei nervi del corpo. Hanno usato un processo di estrusione termica—simile al tiraggio delle fibre ottiche—per creare filamenti lunghi e sottili che contengono materiali multipli organizzati in una sezione trasversale precisa. All’interno di ogni fibra, una guida ottica in plastica trasparente funziona come un sensore muscolare artificiale: è avvolta a spirale in modo che l’allungamento della fibra modifichi la quantità di luce trasmessa. In un’altra zona dello stesso filamento, un blocco di gomma porosa riempito di particelle conduttive funge da sensore di contatto artificiale: la pressione comprime i pori e modifica la sua resistenza elettrica. Poiché la luce gestisce il segnale di estensione e l’elettricità quello di pressione, i due sensi sono distinti in modo naturale pur condividendo un unico percorso flessibile simile a un nervo.
Quanto bene performano i nervi artificiali
Il team ha messo a punto geometry della fibra—la sua lunghezza, il numero di spire e il diametro di queste—per bilanciare sensibilità e trasmissione luminosa affidabile. Nei test, l’unità ottica ha mostrato una variazione di segnale chiara e ripetibile durante l’allungamento della fibra, resistendo a centinaia di cicli di deformazione senza degradarsi. L’unità tattile ha impiegato un metodo con stampo di zucchero per creare una struttura spugnosa di gomma con pori di alcune centinaia di micrometri, quindi l’ha rivestita con una rete di particelle di carbonio. Questo design poroso ha reso il sensore di pressione molto più sensibile e meno lento rispetto a un blocco solido dello stesso materiale, mantenendo stabilità per migliaia di cicli di pressione e rilascio e rispondendo abbastanza rapidamente per movimenti veloci come la presa di oggetti.
Mani e piedi robotici che sanno percepire
Per dimostrare l’applicazione pratica, i ricercatori hanno infilato le fibre in mani e piedi robotici stampati in 3D. In un test di click con una penna, la parte “muscolare” della fibra ha tracciato quanto si piegava il dito robotico, mentre la parte “cutanea” ha rilevato i brevi picchi di pressione generati dal click. Durante un movimento simile alla camminata di un piede robotico, un set di fibre ha monitorato la flessione di caviglia e dita, e un altro ha rilevato la pressione su tallone, mesopiede e punta. Combinando questi segnali, il sistema ha potuto ricostruire quando il piede toccava il suolo, come si spostava il peso e quando la punta spingeva via—proprio come la coordinazione naturale tra sensori articolari e pressori che mantiene l’equilibrio umano durante la camminata.
Cosa potrebbe significare per le macchine del futuro
In termini pratici, questa ricerca dimostra che è possibile integrare due sensi chiave—movimento e tatto—in un singolo elemento filiforme che può snodarsi attraverso forme 3D complesse. Poiché la fibra è flessibile, scalabile e può essere prodotta in lunghe sezioni, può essere tessuta nei vestiti, incorporata in robot morbidi o avvolta attorno a protesi con ingombro e cablaggio minimi. Nel tempo, aggiungendo altre regioni sensoriali o elementi sensibili alla temperatura, reti di tali fibre potrebbero formare una sorta di sistema nervoso artificiale. Questo potrebbe offrire a macchine e dispositivi indossabili una percezione del corpo e dell’ambiente più ricca e simile a quella umana, migliorando controllo, sicurezza e realismo dell’interazione uomo–macchina.
Citazione: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Parole chiave: pelle artificiale, fibra multisensoriale, tocco robotico, propriocezione, robotica morbida