Clear Sky Science · sv
Mekanoreceptorinspirerade flersensoriska fibrer för artificiell somatosensation
Känna världen genom en enda tråd
Föreställ dig en robot som kan känna sina egna rörelser och trycket i ett handslag genom något lika tunt och flexibelt som en sytråd. Denna artikel beskriver just det: en ny typ av smart fiber som efterliknar hur våra nerver uppfattar både rörelse och beröring. Arbetet öppnar dörren för livliknande konstgjord hud, mer rörliga robotar och sömlösa bärbara enheter som i realtid kan läsa kroppens rörelser och kontakt med omvärlden.
Hur våra kroppar känner beröring och rörelse
Vår känsla av ”kroppsmedvetenhet” kommer från två slags sensorer i hud och muskler. Muskelspolar berättar för hjärnan hur mycket musklerna är utsträckta och hjälper oss att veta var våra lemmar befinner sig utan att titta. Taktila receptorer i huden registrerar tryck, textur och kontakt. Båda typerna skickar sina signaler längs smala nervbuntar som löper som endimensionella kablar genom kroppen och tyst koordinerar hållning, gång, grepp och balans. Denna naturliga koppling är kompakt men informationsrik, och inspirerar ingenjörer som vill att maskiner ska uppfatta världen lika smidigt som vi gör.
Varför platta sensorer inte räcker
Många forskargrupper har byggt konstgjorda beröringssensorer på platta ark med tryckt eller lageruppbyggd elektronik. Även om dessa kan upptäcka tryck eller töjning är de ofta begränsade till en typ av signal och kan vara svåra att linda runt kurviga, ledade ytor som fingrar, vrister eller robotarmar. Att kombinera flera sensorfunktioner på en platt yta innebär vanligtvis att stapla eller placera många lager sida vid sida. Det kan leda till att signaler stör varandra, att enheten blir stel i vissa riktningar och att kabeldragning och tillverkning blir komplicerad. Som en följd kan de flesta konstgjorda ”hudar” i dag fortfarande inte matcha den integrerade, tredimensionella täckning som verkliga nätverk av nerver erbjuder.
En nervlik fiber som känner två saker samtidigt
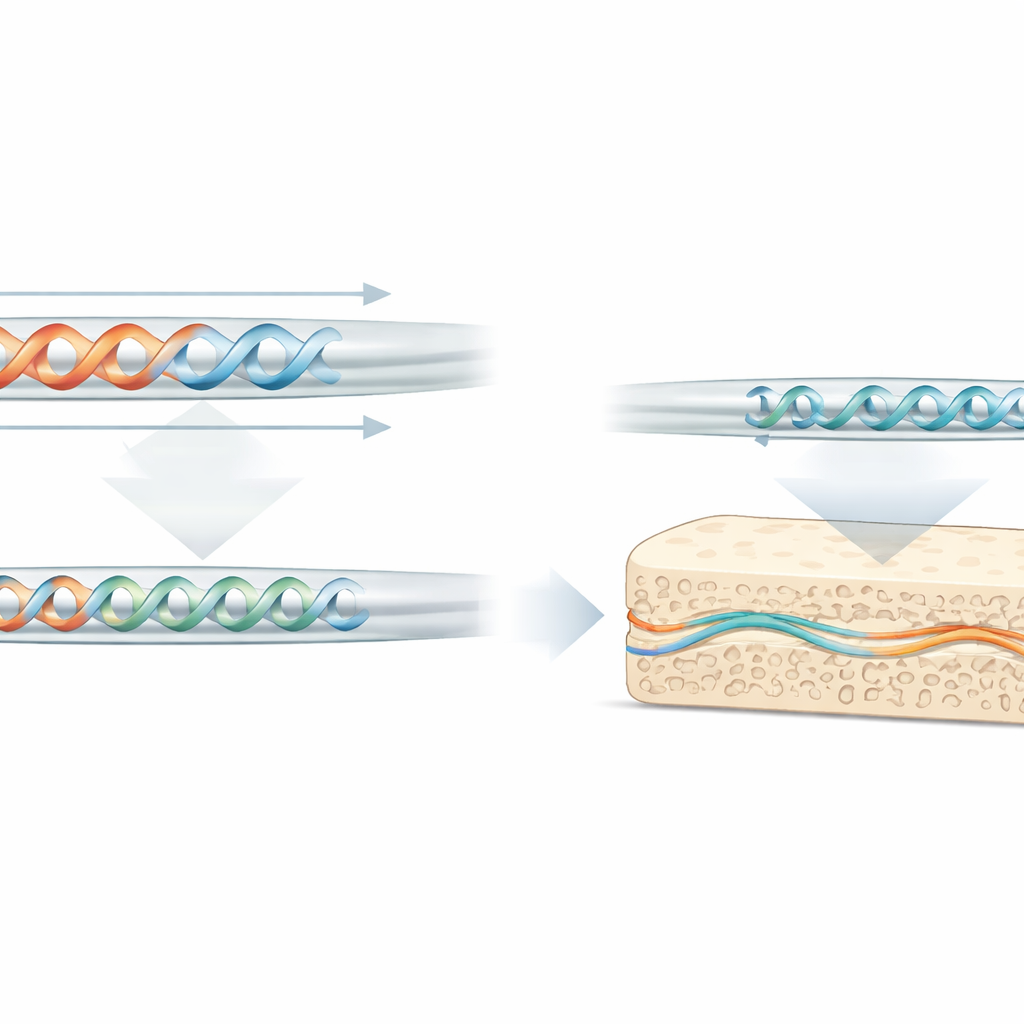
Författarna angriper problemet genom att kopiera kroppens endimensionella nervlayout. De använde en termisk dragprocess—lik den som används för att dra optiska fibrer—för att skapa långa, hårtunna trådar som innehåller flera material organiserade i ett precist tvärsnitt. Inuti varje fiber fungerar en klar plastljusledare som en artificiell muskelsensor: den är lindad i en fjäderliknande form så att fibersträckning ändrar hur mycket ljus som passerar. På en annan plats längs samma tråd fungerar ett poröst gummiblok fyllt med ledande partiklar som en artificiell beröringssensor: att trycka på det komprimerar de små porerna och ändrar dess elektriska resistans. Eftersom ljus hanterar töjningssignalen och elektricitet hanterar trycksignalen, är de två sinnena naturligt separerade men delar ändå en enda, flexibel ”nervlik” bana.
Hur bra de artificiella nerverna presterar
Teamet finjusterade fibergeometrin—dess längd, antal lindningar och diameter på dessa lindningar—för att balansera känslighet med pålitlig ljusöverföring. I tester visade den optiska enheten en tydlig, upprepad förändring i signal när fibern sträcktes, och den klarade hundratals töjningscykler utan försämring. Beröringsenheten använde en socker-mallmetod för att skapa en svampaktig gummistruktur med porer några hundra mikrometer breda, som sedan belades med ett nätverk av kolpartiklar. Denna porösa design gjorde trycksensorn mycket mer känslig och mindre trög än ett solitt block av samma material, samtidigt som den förblev stabil över tusentals tryck-och-frisläpp-cykler och svarade snabbt nog för snabba rörelser som att greppa föremål.
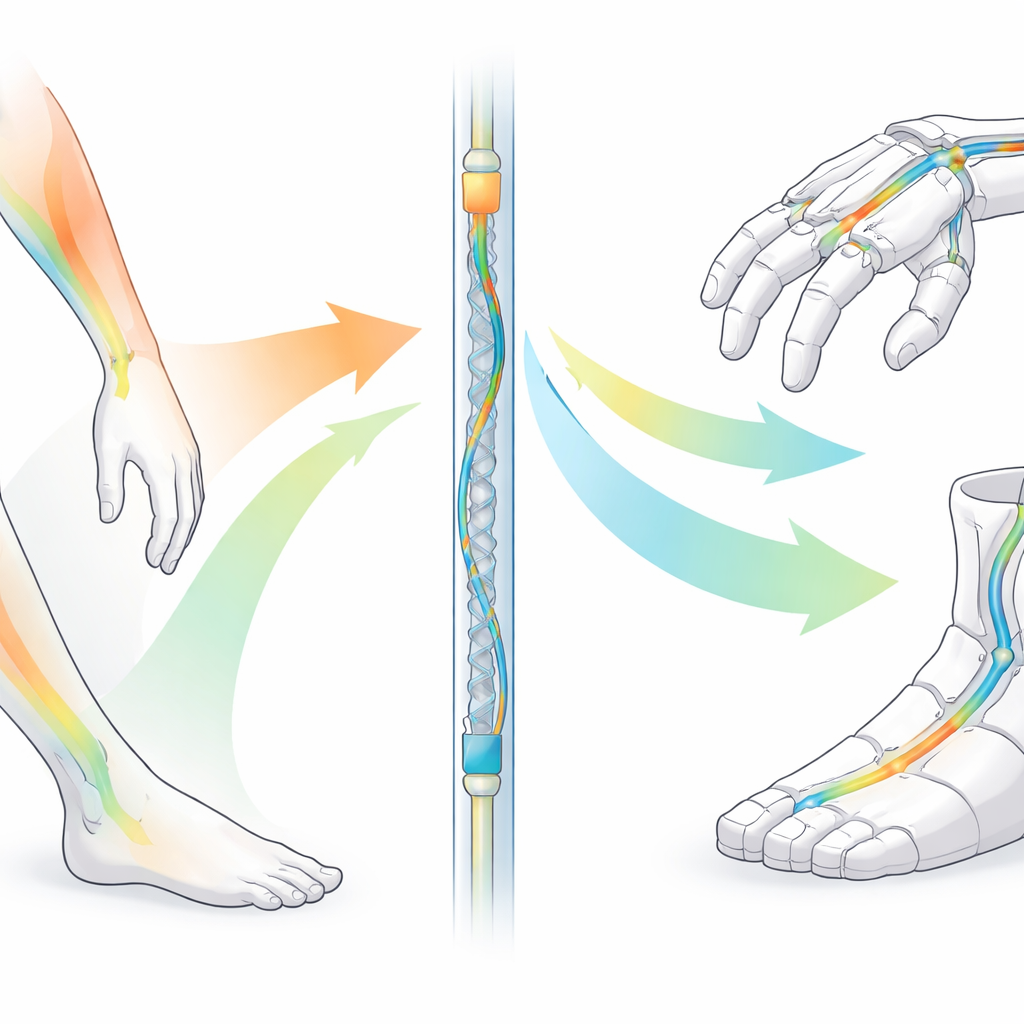
Robotiska händer och fötter som kan känna
För att visa hur dessa fibrer fungerar i praktiken trädde forskarna dem genom 3D-printade robothänder och robotfötter. I ett penn-klick-test följde fiberns ”muskel” hur mycket robotfingret böjde sig, medan fiberns ”hud” fångade de korta tryckspikarna när pennan klickades. Under en gångliknande rörelse hos en robotfot övervakade en uppsättning fibrer vinkeländringar i vrist och tå, och en annan uppsättning kände tryck vid häl, mellanfot och tå. Genom att kombinera dessa signaler kunde systemet rekonstruera när foten träffade marken, hur vikten försköts och när tån tryckte ifrån—ungefär som den naturliga samordningen av led- och trycksensorik som håller människor balanserade vid gång.
Vad detta kan innebära för framtida maskiner
Enkelt uttryckt visar denna forskning att det är möjligt att packa två viktiga sinnen—rörelse och beröring—i ett enda, trådliknande element som kan slingra sig genom komplexa 3D-former. Eftersom fibern är flexibel, skalbar och kan tillverkas i långa längder kan den vävas in i kläder, byggas in i mjuka robotar eller lindas runt proteser med minimal volym och kabeldragning. Med tiden, genom att lägga till fler sensoriska regioner eller till och med temperaturkänsliga element, skulle nätverk av sådana fibrer kunna bilda ett slags artificiellt nervsystem. Detta skulle kunna ge maskiner och bärbara enheter en rikare, mer människolik känsla av sina kroppar och omgivningar, förbättra kontroll, säkerhet och realismen i människa–maskin-interaktion.
Citering: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Nyckelord: konstgjord hud, flersensorisk fiber, robotiskt beröring, proprioception, mjuka robotar