Clear Sky Science · es
Fibras multisensoriales inspiradas en mecanorreceptores para la somatosensación artificial
Sintiendo el mundo a través de un solo hilo
Imagínese un robot que pueda percibir sus propios movimientos y la presión de un apretón de manos a través de algo tan delgado y flexible como un hilo de coser. Este artículo describe precisamente eso: un nuevo tipo de fibra inteligente que imita cómo nuestros nervios detectan tanto el movimiento como el tacto. El trabajo abre la puerta a pieles artificiales con apariencia y función más realistas, robots más ágiles y dispositivos ponibles que lean en tiempo real los movimientos del cuerpo y el contacto con el entorno.
Cómo percibimos el tacto y el movimiento
Nuestra sensación de “consciencia corporal” proviene de dos tipos de sensores en la piel y los músculos. Los husos musculares indican al cerebro cuánto se estiran los músculos, ayudándonos a saber dónde están las extremidades sin mirar. Los receptores táctiles en la piel registran presión, textura y contacto. Ambos tipos transmiten sus señales a lo largo de haces nerviosos delgados que recorren el cuerpo como cables unidimensionales, coordinando de forma silenciosa la postura, la marcha, el agarre y el equilibrio. Este cableado natural es compacto pero rico en información, e inspira a los ingenieros que buscan que las máquinas perciban el mundo con la misma fluidez que nosotros.
Por qué los sensores planos se quedan cortos
Muchos grupos de investigación han construido sensores táctiles artificiales sobre hojas planas usando electrónica impresa o en capas. Si bien estos pueden detectar presión o estiramiento, a menudo están limitados a un solo tipo de señal y resultan difíciles de envolver alrededor de superficies curvas y articulares como dedos, tobillos o extremidades robóticas. Combinar varias funciones sensoriales en una superficie plana suele implicar apilar o disponer muchas capas una al lado de la otra. Esto puede provocar interferencia entre señales, endurecer el dispositivo en ciertas direcciones y complicar el cableado y la fabricación. Como resultado, la mayoría de las “pieles” artificiales actuales aún no igualan la cobertura integrada y tridimensional de las redes nerviosas reales.
Una fibra tipo nervio que siente dos cosas a la vez
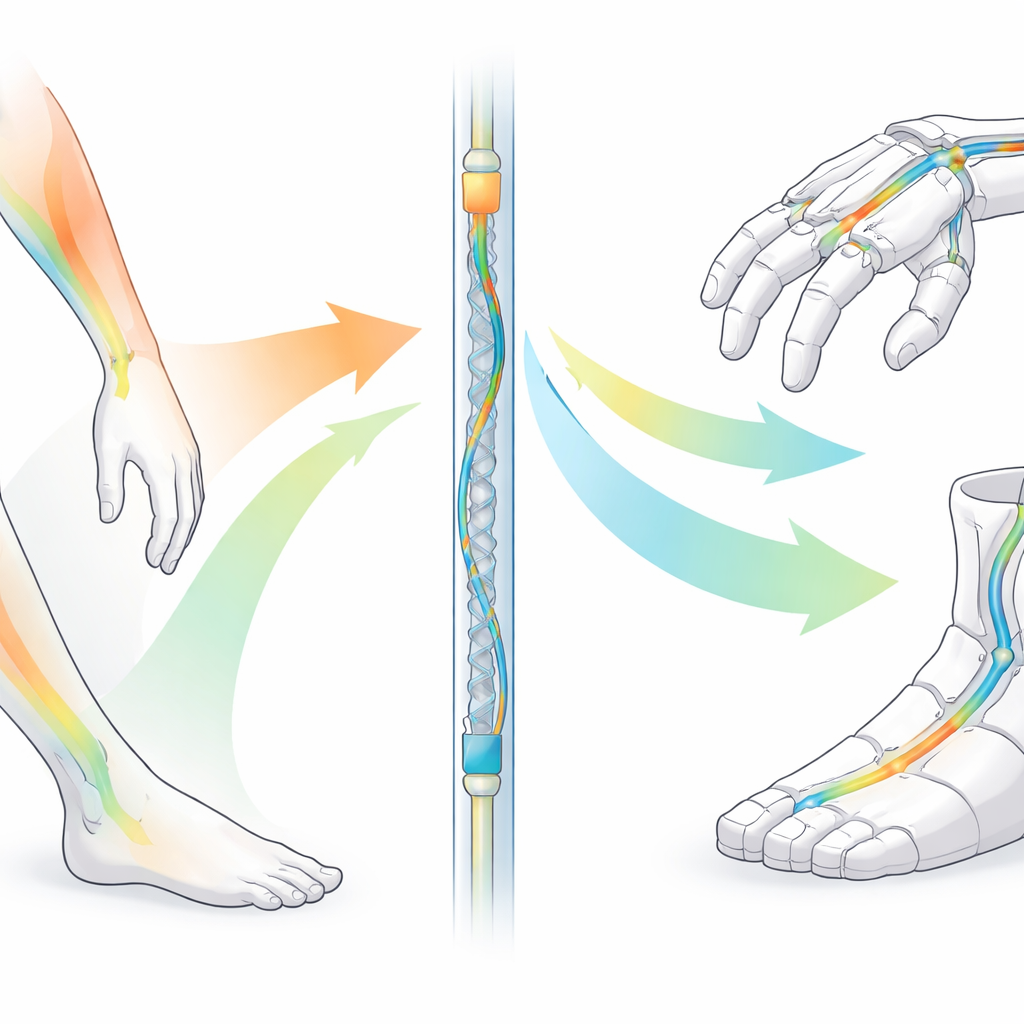
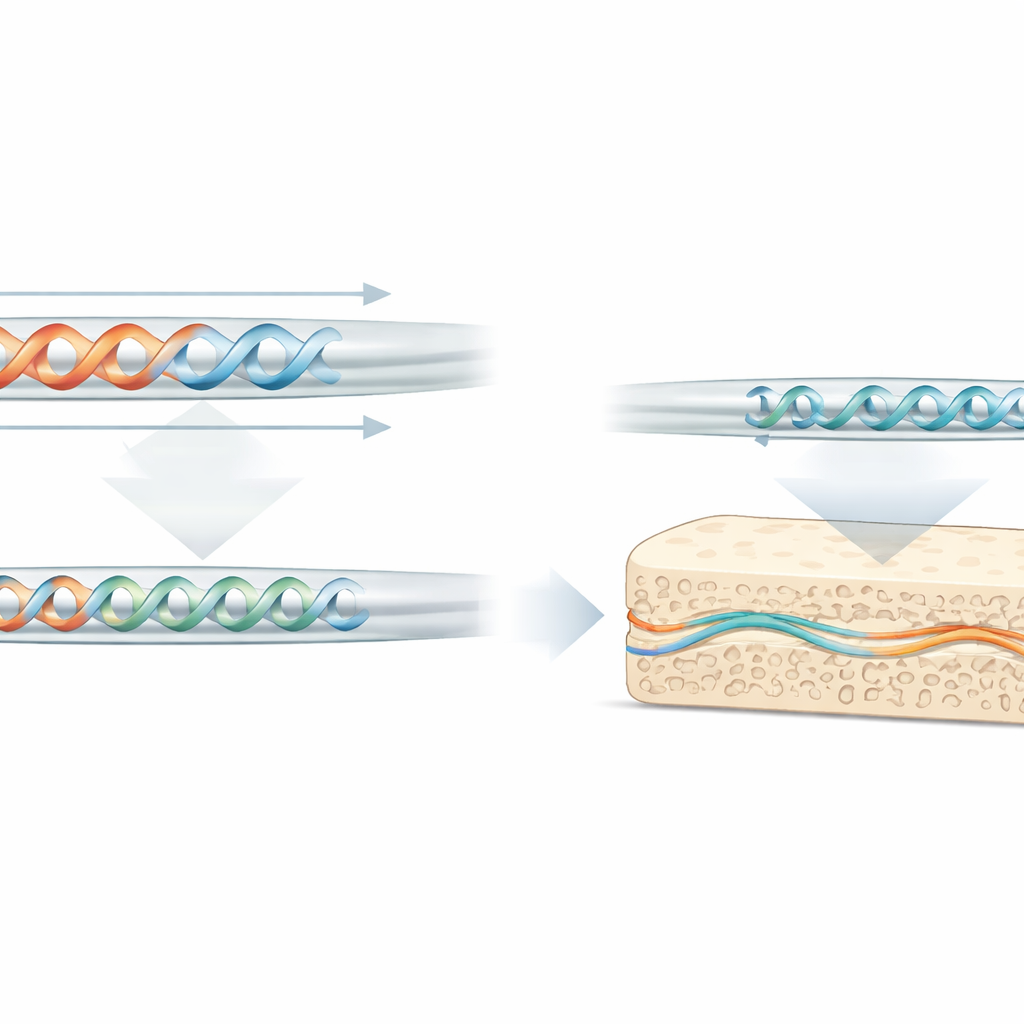
Los autores abordaron este problema copiando el diseño unidimensional de los nervios del cuerpo. Emplearon un proceso de estirado térmico —similar al de fabricar fibras ópticas— para crear largos filamentos finísimos que contienen múltiples materiales organizados en una sección transversal precisa. Dentro de cada fibra, una guía de luz de plástico transparente funciona como sensor artificial de “músculo”: está enrollada en forma de muelle de modo que estirar la fibra cambia la cantidad de luz que la atraviesa. En otro punto de la misma hebra, un bloque de caucho poroso relleno de partículas conductoras actúa como sensor táctil artificial: apretarlo comprime los poros microscópicos y altera su resistencia eléctrica. Debido a que la luz transporta la señal de estiramiento y la electricidad la señal de presión, los dos sentidos quedan separados de forma natural pero comparten una única vía flexible tipo “nervio”.
Qué tan bien rinden los nervios artificiales
El equipo ajustó cuidadosamente la geometría de la fibra —su longitud, el número de bobinas y el diámetro de esas bobinas— para equilibrar la sensibilidad con una transmisión de luz fiable. En las pruebas, la unidad óptica mostró un cambio claro y repetible en la señal al estirar la fibra, y resistió cientos de ciclos de deformación sin degradarse. La unidad táctil empleó un método con plantilla de azúcar para crear una estructura esponjosa de caucho con poros de unos pocos cientos de micrómetros de ancho, y luego la recubrieron con una red de partículas de carbono. Este diseño poroso hizo que el sensor de presión fuera mucho más sensible y menos torpe que un bloque sólido del mismo material, manteniéndose estable durante miles de ciclos de pulsar y soltar y respondiendo lo suficientemente rápido para movimientos rápidos como el agarre de objetos.
Manos y pies robóticos que pueden sentir
Para demostrar cómo funcionan estas fibras en práctica, los investigadores las enhebraron a través de manos y pies robóticos impresos en 3D. En una prueba de hacer clic con un bolígrafo, la parte “muscular” de la fibra registró cuánto se doblaba el dedo robótico, mientras que la parte “cutánea” captó los breves picos de presión cuando se hacía el clic. Durante un movimiento similar a la marcha de un pie robótico, un conjunto de fibras monitorizó la flexión del tobillo y los dedos, y otro conjunto detectó la presión en el talón, el mediopié y la punta. Combinando estas señales, el sistema pudo reconstruir cuándo el pie golpeaba el suelo, cómo se desplazaba el peso y cuándo el dedo empujaba para impulsarse—muy parecido a la coordinación natural de la detección articular y de presión que mantiene el equilibrio humano al caminar.
Qué podría significar esto para las máquinas del futuro
En términos sencillos, esta investigación demuestra que es posible empaquetar dos sentidos clave —movimiento y tacto— en un único elemento parecido a un hilo que puede serpentear por formas tridimensionales complejas. Dado que la fibra es flexible, escalable y se fabrica en longitudes grandes, puede tejerse en ropa, integrarse en robots blandos o enrollarse alrededor de prótesis con un volumen y un cableado mínimos. Con el tiempo, añadiendo más regiones sensoriales o incluso elementos sensibles a la temperatura, redes de tales fibras podrían formar una especie de sistema nervioso artificial. Esto daría a las máquinas y a los dispositivos ponibles una percepción más rica y humana de su propio cuerpo y del entorno, mejorando el control, la seguridad y el realismo de la interacción humano–máquina.
Cita: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Palabras clave: piel artificial, fibra multisensorial, tacto robótico, propiocepción, robótica blanda