Clear Sky Science · pt
Fibras multissensoriais inspiradas em mecanorreceptores para somaçã o artificial
Sentir o Mundo por Um Único Fio
Imagine um robô que consegue sentir seus próprios movimentos e a pressão de um aperto de mão por algo tão fino e flexível quanto um pedaço de linha de costura. Este artigo descreve exatamente isso: um novo tipo de fibra inteligente que imita como nossos nervos detectam movimento e contato. O trabalho abre caminho para peles artificiais mais realistas, robôs mais ágeis e dispositivos vestíveis integrados que leem em tempo real os movimentos do corpo e o contato com o mundo.
Como Nosso Corpo Percebe Toque e Movimento
Nossa sensação de “consciência corporal” vem de dois tipos de sensores na pele e nos músculos. As fusos musculares dizem ao cérebro quanto os músculos estão esticados, ajudando-nos a saber onde estão nossos membros sem olhar. Receptores táteis na pele registram pressão, textura e contato. Ambos os tipos enviam seus sinais por feixes de nervos delgados que correm como cabos unidimensionais pelo corpo, coordenando discretamente postura, marcha, preensão e equilíbrio. Essa fiação natural é compacta e ao mesmo tempo rica em informação, e inspira engenheiros que querem que máquinas percebam o mundo tão suavemente quanto nós.
Por Que Sensores Planos Não Bastam
Muitos grupos de pesquisa construíram sensores de toque artificiais em folhas planas usando eletrônica impressa ou em camadas. Embora esses possam detectar pressão ou alongamento, frequentemente ficam limitados a um tipo de sinal e são difíceis de envolver superfícies curvas e articulares como dedos, tornozelos ou membros robóticos. Combinar várias funções sensoriais em uma superfície plana geralmente significa empilhar ou dispor muitas camadas lado a lado. Isso pode causar interferência entre sinais, tornar o dispositivo rígido em certas direções e complicar a fiação e a fabricação. Como resultado, a maioria das “peles” artificiais atuais ainda não consegue igualar a cobertura integrada e tridimensional das redes nervosas reais.
Uma Fibra Semelhante a um Nervo que Sente Duas Coisas ao Mesmo Tempo
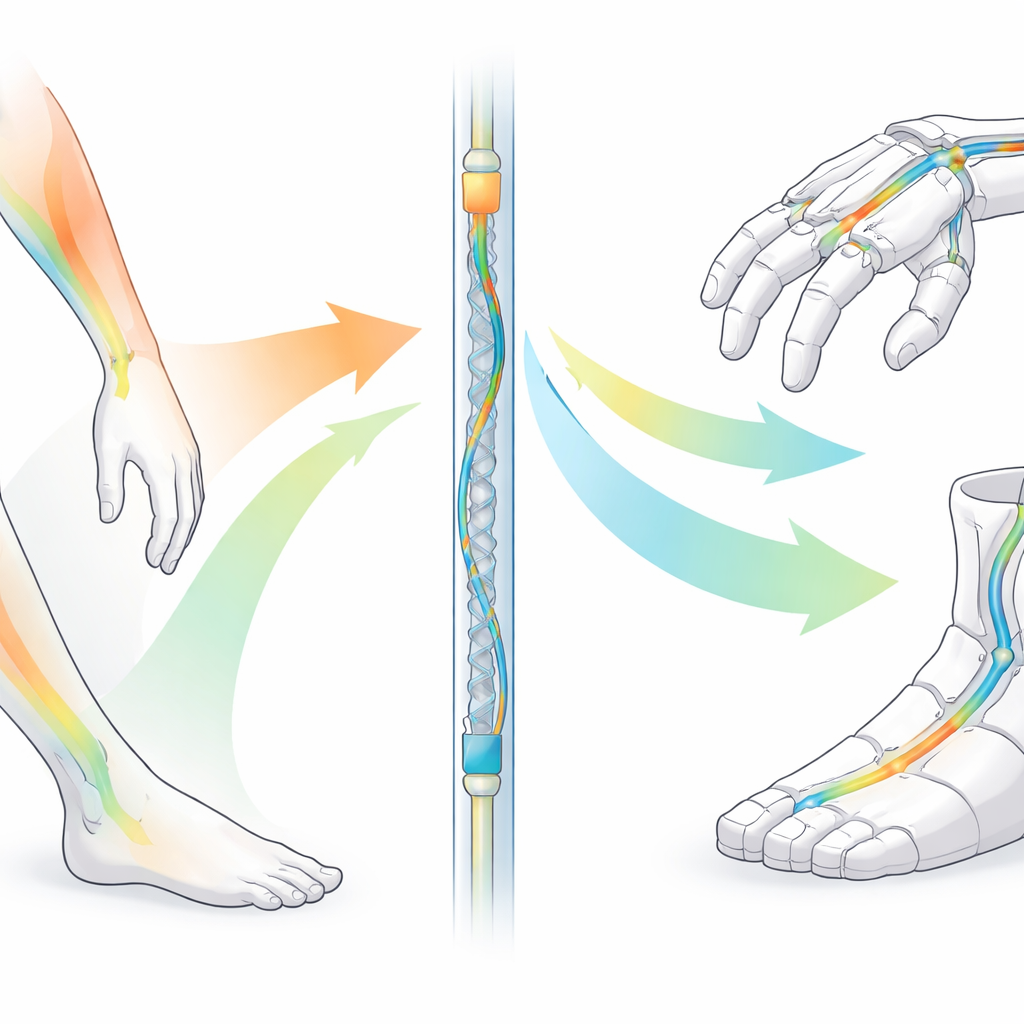
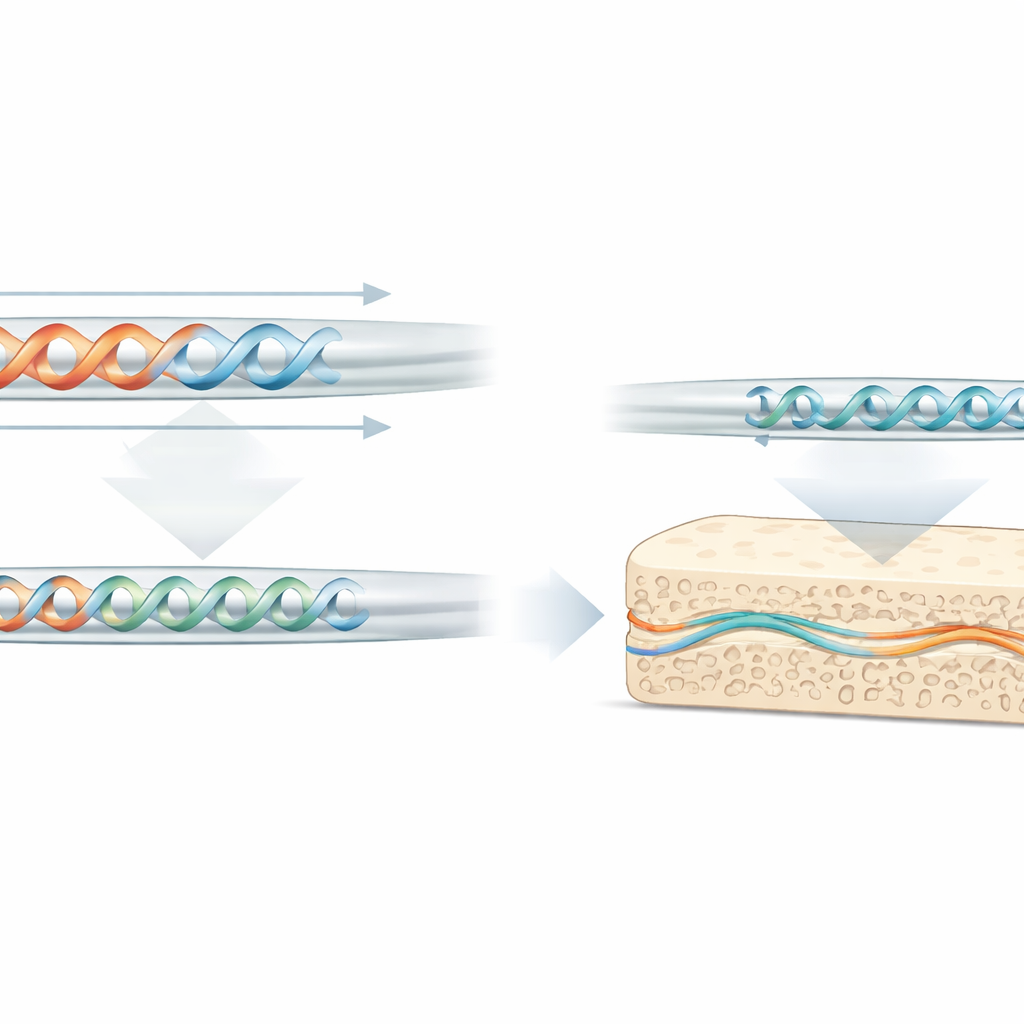
Os autores enfrentaram esse problema copiando a disposição unidimensional dos nervos do corpo. Eles usaram um processo de extrusão térmica—semelhante ao puxamento de fibras ópticas—para criar fios longos e finos que contêm múltiplos materiais organizados em uma seção transversal precisa. Dentro de cada fibra, uma guia de luz plástica transparente atua como um sensor muscular artificial: ela é enrolada em forma de mola de modo que esticar a fibra altera a quantidade de luz que passa. Em outro ponto do mesmo fio, um bloco de borracha porosa preenchido com partículas condutoras funciona como sensor de toque artificial: pressioná‑lo comprime os pequenos poros e altera sua resistência elétrica. Porque a luz trata do sinal de alongamento e a eletricidade trata do sinal de pressão, os dois sentidos ficam naturalmente separados, ainda que compartilhem um único caminho flexível “semelhante a um nervo”.
Como os Nervos Artificiais Desempenham
A equipe ajustou cuidadosamente a geometria da fibra—seu comprimento, o número de espirais e o diâmetro dessas espirais—para equilibrar sensibilidade e transmissão confiável da luz. Em testes, a unidade óptica mostrou uma mudança de sinal clara e repetível conforme a fibra era esticada, e sobreviveu a centenas de ciclos de deformação sem degradação. A unidade de toque usou um método com molde de açúcar para criar uma estrutura de borracha semelhante a uma esponja, com poros de algumas centenas de micrômetros, e em seguida a revestiu com uma rede de partículas de carbono. Esse desenho poroso tornou o sensor de pressão muito mais sensível e menos lento do que um bloco sólido do mesmo material, mantendo estabilidade por milhares de ciclos de pressão e liberação e respondendo rápido o suficiente para movimentos rápidos como pegar objetos.
Mãos e Pés Robóticos que Conseguem Sentir
Para demonstrar como essas fibras funcionam na prática, os pesquisadores as passaram por mãos e pés robóticos impressos em 3D. Em um teste de clicar caneta, a parte “muscular” da fibra acompanhou quanto o dedo robótico dobrou, enquanto a parte “cutânea” detectou os breves picos de pressão quando a caneta era clicada. Durante um movimento semelhante à caminhada de um pé robótico, um conjunto de fibras monitorou a flexão do tornozelo e dos dedos, e outro conjunto sentiu a pressão no calcanhar, médio do pé e ponta. Combinando esses sinais, o sistema pôde reconstruir quando o pé tocou o chão, como o peso se deslocou e quando o dedo impulsionou—muito parecido com a coordenação natural entre detecção de articulação e pressão que mantém humanos equilibrados ao andar.
O Que Isso Pode Significar para Máquinas Futuras
Em termos simples, esta pesquisa mostra que é possível integrar dois sentidos-chave—movimento e toque—em um único elemento semelhante a um fio que pode serpentear por formas 3D complexas. Como a fibra é flexível, escalável e fabricada em comprimentos longos, ela pode ser tecida em roupas, embutida em robôs macios ou enrolada em próteses com volume e fiação mínimos. Ao longo do tempo, adicionando mais regiões sensoriais ou até elementos sensíveis à temperatura, redes dessas fibras poderiam formar uma espécie de sistema nervoso artificial. Isso poderia dar a máquinas e dispositivos vestíveis uma percepção corporal e ambiental mais rica e humana, melhorando controle, segurança e o realismo da interação humano–máquina.
Citação: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Palavras-chave: pele artificial, fibra multissensorial, toque robótico, propriocepção, robótica macia