Clear Sky Science · nl
Mechanoreceptor-geïnspireerde multisensorische vezels voor kunstmatige somatosensatie
De wereld voelen via één enkele draad
Stel je een robot voor die zijn eigen bewegingen en de druk van een handdruk kan voelen via iets zo dun en flexibel als naaigaren. Dit artikel beschrijft precies dat: een nieuw type slimme vezel die nabootst hoe onze zenuwen zowel beweging als aanraking waarnemen. Het werk opent de deur naar levensechte kunsthuid, wendbaardere robots en naadloze draagbare apparaten die in realtime de bewegingen van het lichaam en contact met de wereld kunnen meten.
Hoe ons lichaam aanraking en beweging voelt
Ons gevoel van “lichaamsbewustzijn” komt van twee soorten sensoren in huid en spieren. Spierspoelen vertellen de hersenen hoeveel spieren uitgerekt zijn, wat helpt te weten waar onze ledematen zijn zonder te kijken. Tactiele receptoren in de huid registreren druk, textuur en contact. Beide typen sturen hun signalen langs dunne zenuwbundels die als eendimensionale kabels door het lichaam lopen en stilistisch houding, lopen, grijpen en balans coördineren. Deze natuurlijke bedrading is compact maar informatief, en vormt inspiratie voor ingenieurs die machines willen laten waarnemen zoals wij dat soepel doen.
Waarom platte sensoren tekortschieten
Veel onderzoeksgroepen hebben kunstmatige aanraking-sensoren gebouwd op platte vellen met geprinte of gelaagde elektronica. Hoewel deze druk of rek kunnen detecteren, beperken ze zich vaak tot één soort signaal en zijn ze moeilijk rond gebogen, gewrichtsachtige oppervlakken zoals vingers, enkels of robotarmen te vouwen. Meerdere functies op een plat oppervlak combineren betekent meestal stapeling of zij-aan-zij plaatsing van lagen. Dit kan leiden tot interferentie tussen signalen, maakt het apparaat stijf in bepaalde richtingen en complicaties in bedrading en productie. Daardoor kunnen de meeste kunstmatige “huiden” vandaag de dag nog niet tippen aan de geïntegreerde, driedimensionale dekking van echte zenuwnetwerken.
Een zenuwachtige vezel die twee dingen tegelijk voelt
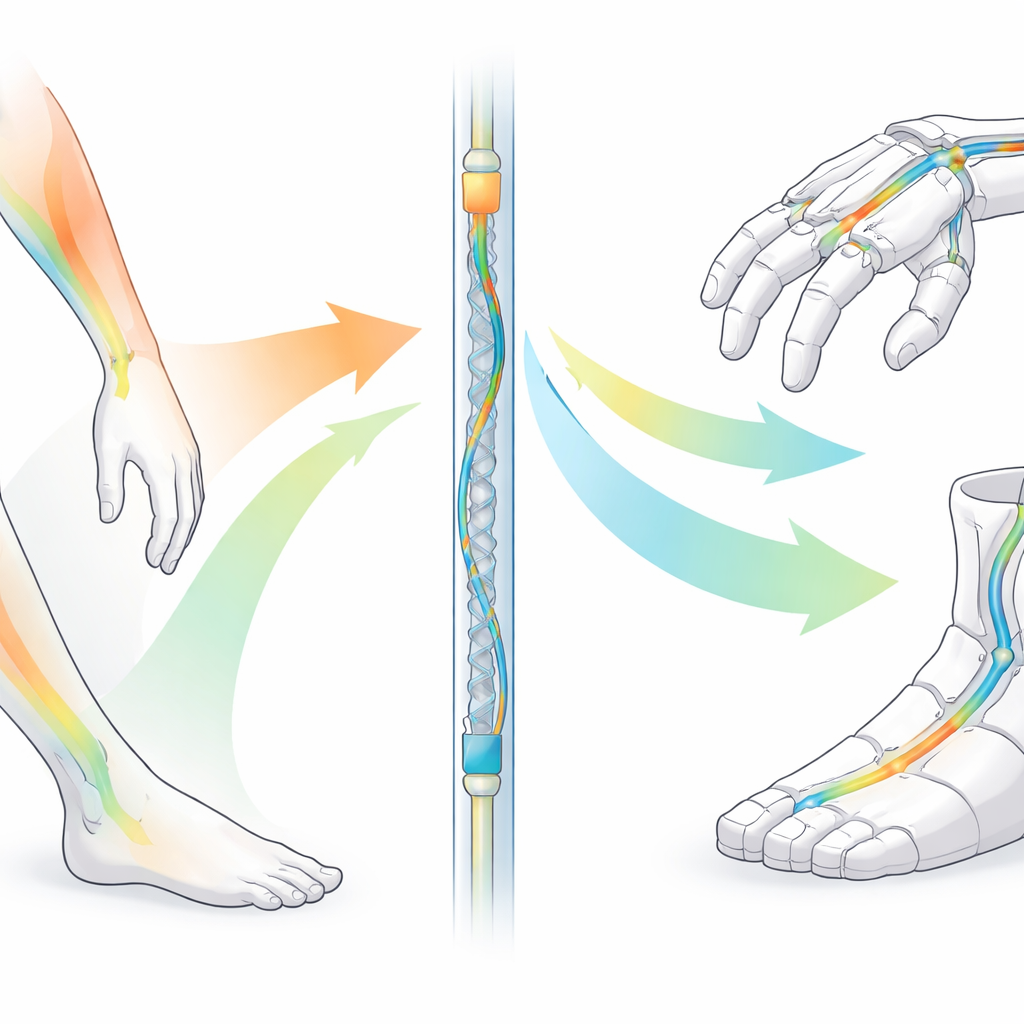
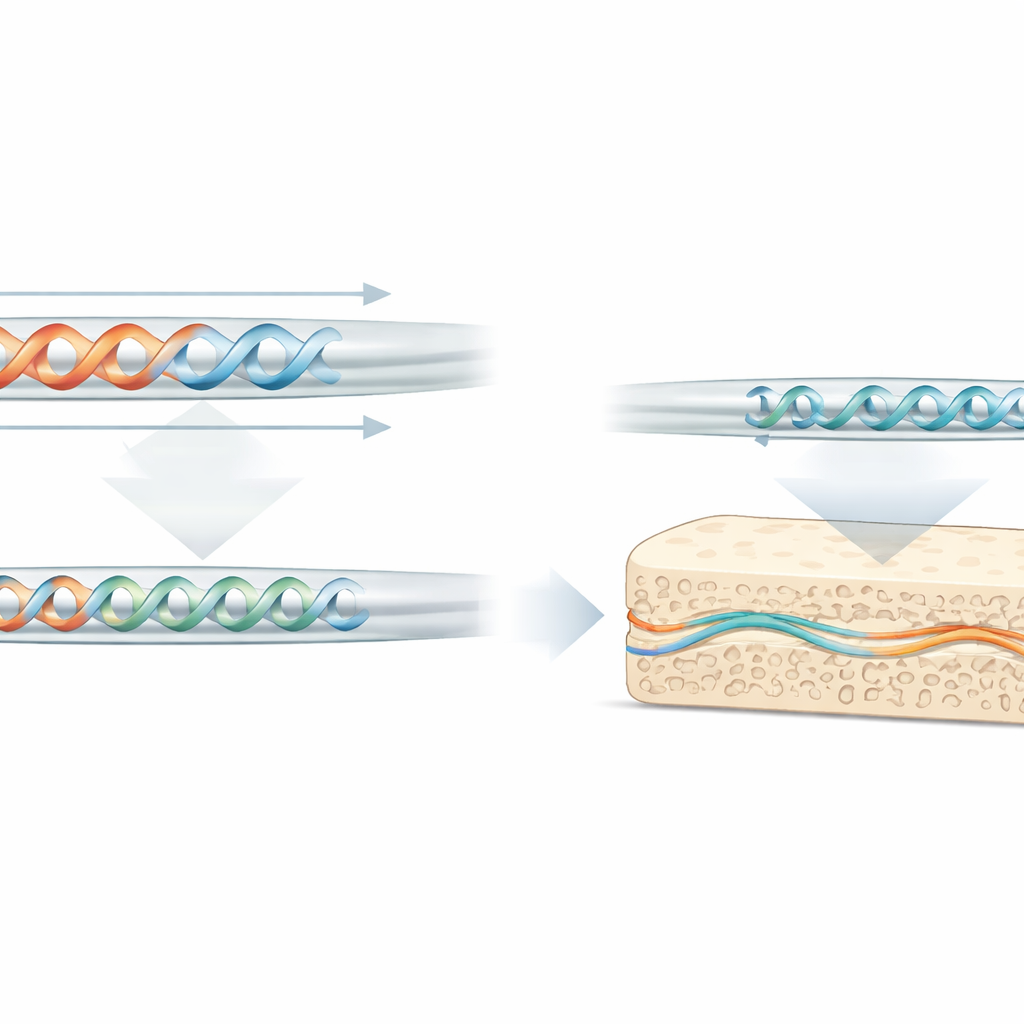
De auteurs pakten dit probleem aan door de eendimensionale zenuwindeling van het lichaam te kopiëren. Ze gebruikten een thermisch trekproces—vergelijkbaar met het uittrekken van optische vezels—om lange, haarfijne strengen te maken die meerdere materialen bevatten, georganiseerd in een precieze doorsnede. Binnen elke vezel werkt een heldere kunststof lichtgeleider als een kunstmatige spieren-sensor: die is in een veerachtige spoel gewonden zodat het rekken van de vezel verandert hoeveel licht erdoorheen gaat. Op een ander punt van dezelfde streng fungeert een poreuze rubberblok gevuld met geleidende deeltjes als kunstmatige aanrakingssensor: indrukken knijpt de kleine poriën samen en verandert de elektrische weerstand. Omdat licht het reksignaal draagt en elektriciteit het druksignaal, zijn de twee sensoren van nature gescheiden maar delen ze toch één flexibele, “zenuwachtige” route.
Hoe goed de kunstmatige zenuwen presteren
Het team stemde de geometrie van de vezel zorgvuldig af—de lengte, het aantal windingen en de diameter van die windingen—om gevoeligheid in balans te brengen met betrouwbare lichttransmissie. In tests liet de optische eenheid een duidelijke, herhaalbare signaalverandering zien bij rek en overleefde honderden rekcycli zonder achteruitgang. De aanrakingseenheid gebruikte een suiker-template methode om een sponsachtig rubberstructuur te maken met poriën van enkele honderden micrometers, en bedekte dat daarna met een netwerk van deeltjes koolstof. Dit poreuze ontwerp maakte de druksensor veel gevoeliger en minder traag dan een massief blok van hetzelfde materiaal, terwijl hij stabiel bleef over duizenden indruk- en loslaatcycli en snel genoeg reageerde voor snelle bewegingen zoals het grijpen van objecten.
Robotarmen en -voeten die kunnen voelen
Om te laten zien hoe deze vezels in de praktijk werken, voerden de onderzoekers ze door 3D-geprinte robotarmen en -voeten. In een pen-klikker test volgde het “spier”gedeelte van de vezel hoeveel de robotvinger boog, terwijl het “huid”gedeelte de korte drukpieken oppikte wanneer de pen werd geklikt. Tijdens een loopachtige beweging van een robotervoet hield één set vezels enkel- en teenbuiging in de gaten, en een andere set voelde de druk bij hiel, middenvoet en teen. Door deze signalen te combineren kon het systeem reconstrueren wanneer de voet de grond raakte, hoe het gewicht verschoof en wanneer de teen afzet—net als de natuurlijke coördinatie van gewrichts- en druksensing die mensen in balans houdt tijdens het lopen.
Wat dit voor toekomstige machines kan betekenen
Kort gezegd toont dit onderzoek aan dat het mogelijk is om twee belangrijke zintuigen—beweging en aanraking—te verpakken in een enkel, draadachtig element dat zich door complexe 3D-vormen kan slingeren. Omdat de vezel flexibel, schaalbaar en in lange lengtes te maken is, kan hij in kleding worden geweven, in zachte robots worden ingebed of met weinig volume en bedrading om protheselimmen worden gewikkeld. Na verloop van tijd, door extra sensorische regio’s of zelfs temperatuurgevoelige elementen toe te voegen, zouden netwerken van zulke vezels een soort kunstmatig zenuwsysteem kunnen vormen. Dit zou machines en draagbare apparaten een rijker, menselijker gevoel voor hun lichaam en omgeving kunnen geven, wat de controle, veiligheid en realisme van mens–machineinteractie verbetert.
Bronvermelding: Jeon, S., Lee, J., Won, J. et al. Mechanoreceptor-inspired multisensory fibers for artificial somatosensation. npj Flex Electron 10, 51 (2026). https://doi.org/10.1038/s41528-026-00555-3
Trefwoorden: kunstmatige huid, multisensorische vezel, robotische aanraking, proprioceptie, zachte robotica