Clear Sky Science · zh
基于超柔光电阻抗断层成像的3轴机器人触觉成像器
真正能“触摸”的机器人
触觉是机器人仍难以模仿的人类感官之一。这项研究提出了一种纸张般薄的电子“皮肤”,不仅能让机器人感知按压力度,还能判断力来自哪个方向。由于它柔软、可弯曲且对损伤有一定容忍度,这种新型传感器未来可能覆盖机器人手部、医疗器械或可穿戴设备,为它们提供更自然的触觉。
一种全新的“看见”触觉的方法
目前大多数机器人触觉传感器的工作方式类似密集连线的键盘:每个微小的感测点都需要独立连接。这样的设计在扩展到大面积时变得复杂、脆弱且昂贵,一条断线就可能使整行或整列失效。该团队采取了完全不同的思路。他们没有使用像素网格,而是构建了一个圆形、超薄的薄膜,边缘仅布置了16个金属接触点。光线照射传感器会改变其内部电流流动,计算机据此重建中间区域的图像——类似于医学扫描通过表面测量推断体内情况。这种称为光电阻抗断层成像的方法,使研究人员能用更少的线路“看见”出明暗的细致图案。
薄得像保鲜膜的薄膜
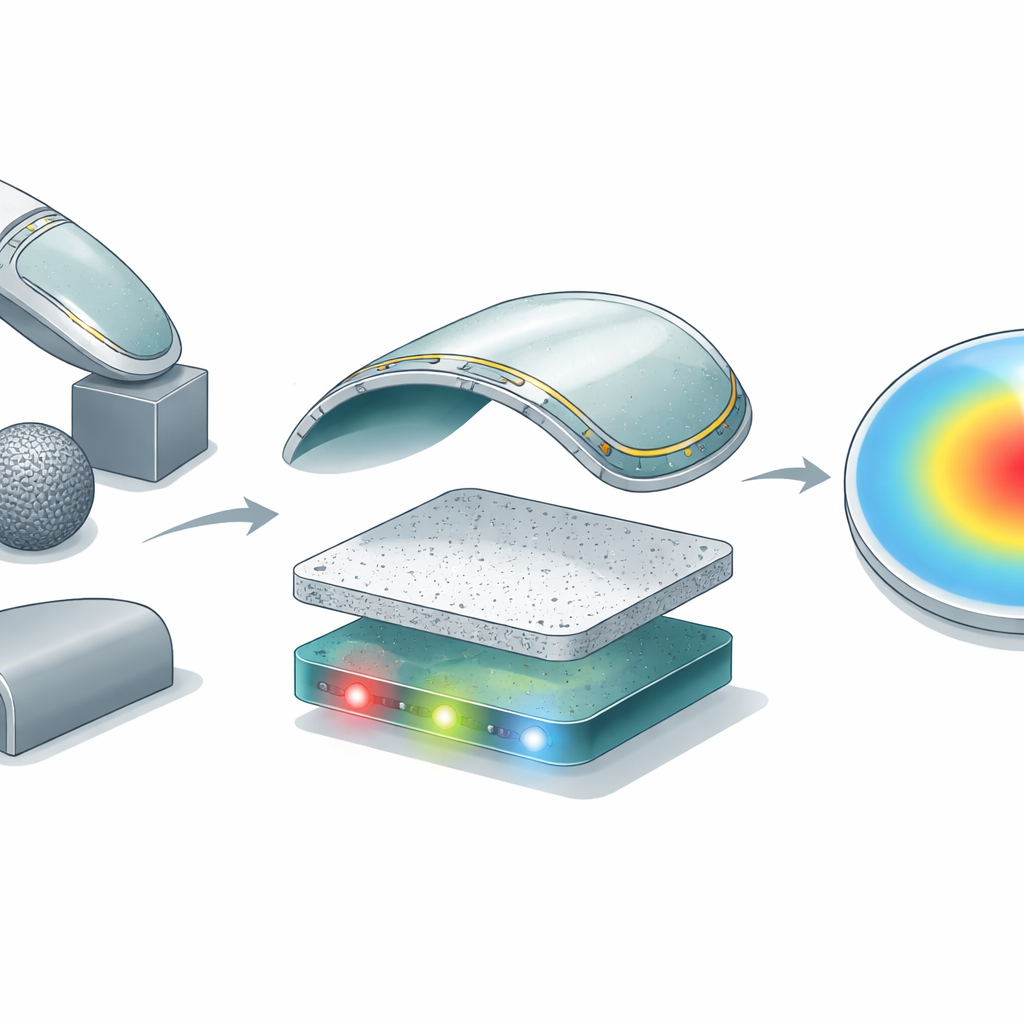
该成像器厚度约为五微米——比人类头发细许多倍——但它由几层精心调校的材料组合而成。研究人员制成了超柔的塑料基底,加入了光敏的金属氧化物薄膜,然后涂覆了量子点,这些微小的半导体晶体对紫外和可见光具有强烈响应。在外缘放置了小型铝电极。当薄膜从下方被照亮时,接收更多光的区域与遮光区域的电导不同。通过在边缘电极对之间施加电流并测量得到的电压,系统可以重建中心区域的二维光强分布。测试表明,该器件对光响应强烈、在数小时使用中保持稳定,并能区分彼此相距仅1.5毫米的特征——即便包覆在笔等弯曲物体上或弯折在针状细棒上仍然有效。
不仅透过光线“看见”,还能透过压力
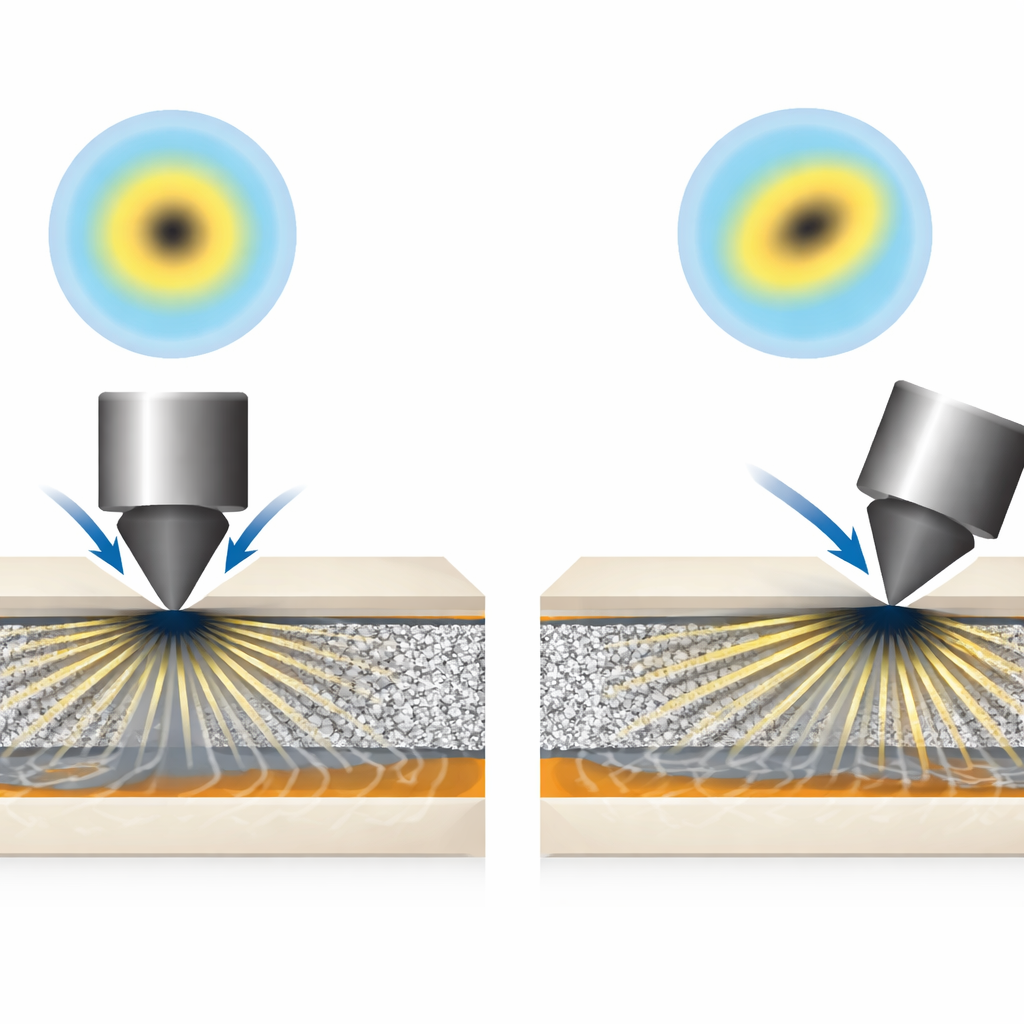
为将该光学成像器转变为触觉感知装置,团队增加了两层:下方是一层柔性的紫外LED阵列,中间夹着一层多孔的海绵状硅橡胶。在无压力时,橡胶中的微小气孔会散射光线,使成像器接收到较柔和且相对均匀的光。当某处施压时,该区域的气孔塌陷,材料在该处变得更透明,光的分布发生变化。垂直按压会形成更集中的光斑,而滑动或倾斜按压会使光斑向一侧偏移。研究人员通过将这些变化的光斑拟合为简单的钟形曲线,就能将暗区的形状与位置转换为向下力的大小以及横向力的方向和幅度。
能判断方向的机器人触觉
装在机器人手指上时,这种薄型传感器能判断它是按在球体上、立方体的平面、边缘还是尖角,并能追踪手指在表面滑动时的运动。该器件在较宽范围内感知法向压力,对轻触也具备良好灵敏度,并能检测到每单位力只有亚微米级的微小横向位移。由于采用边缘测量方法,即便部分薄膜被刻意刺破,设备仍能工作。一种基于计算机视觉的模型在重建出的图案上进行训练后,对不同接触情形的识别准确率约为96.5%,显示出这种富含图像信息的数据很容易被现代人工智能工具理解。
这对日常生活意味着什么
简而言之,研究人员创造了一层柔性、类似相机的触觉层,可以覆盖在曲面上而无需复杂缠绕的布线。由于它薄、可弯曲且制造成本相对较低,未来可望覆盖机器人手部、大面积义肢或类似衣物的健康监测设备。除机器人领域外,同样的技术还能直接在皮肤上映射防晒霜对紫外线的阻隔效果、检查医疗器械的表面受压情况,或为日常物品增加触觉感知。虽然要提高系统速度并实现同时感测多个接触点还需更多工作,但这项研究指向了一个未来:机器能以更接近我们自身触觉的精度“感受”世界。
引用: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
关键词: 机器人触觉感知, 柔性电子皮肤, 阻抗断层成像, 三轴力感测, 量子点成像器