Clear Sky Science · en
Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing
Robots That Can Truly Feel
Touch is one of the human senses that robots still struggle to copy. This study introduces a paper-thin electronic “skin” that allows robots to feel not just how hard they are pressing, but also from which direction the force comes. Because it is soft, bendable, and even tolerant to damage, this new sensor could one day cover robot hands, medical devices, or wearable gadgets, giving them a far more natural sense of touch.
A New Way to See Touch
Most existing touch sensors for robots work like tightly wired keyboards: every tiny sensing point needs its own connection. That design becomes complicated, fragile, and expensive when scaled up to large areas, and a single broken line can knock out a whole row or column. The team behind this work took a very different approach. Instead of using a grid of individual pixels, they built a round, ultrathin film with just 16 metal contacts placed around the edge. Light shining through the sensor changes how electricity flows inside it, and a computer reconstructs an image of what is happening in the middle—similar to how medical scans infer what is inside the body from measurements at the surface. This method, called photoelectrical impedance tomography, lets the researchers “see” a detailed pattern of light and dark with far fewer wires.
A Film as Thin as Plastic Wrap
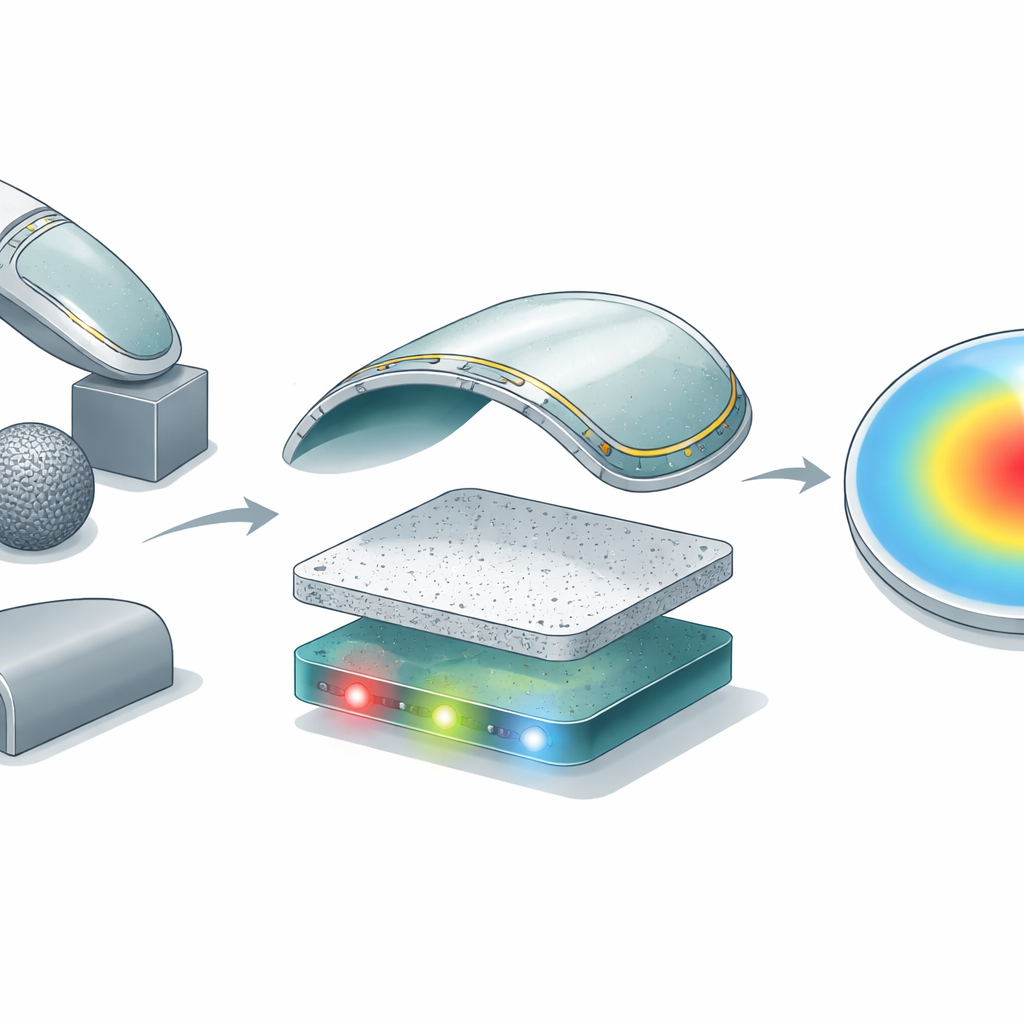
The new imager is only about five micrometers thick—many times thinner than a human hair—yet it combines several carefully tuned layers. The researchers formed an ultraflexible plastic base, added a light-sensitive metal-oxide film, and then coated it with quantum dots, tiny semiconductor crystals that strongly respond to ultraviolet and visible light. Around the outer rim they placed small aluminum electrodes. When the film is lit from below, areas that receive more light conduct electricity differently from shaded regions. By sending currents between pairs of edge electrodes and measuring the resulting voltages, the system reconstructs a two‑dimensional map of light intensity in the center. Tests showed that the device responds strongly to light, remains stable over hours of use, and can distinguish features as close as 1.5 millimeters apart—even when wrapped around curved objects like pens or bent over a needle‑thin rod.
Seeing Through Pressure, Not Just Light
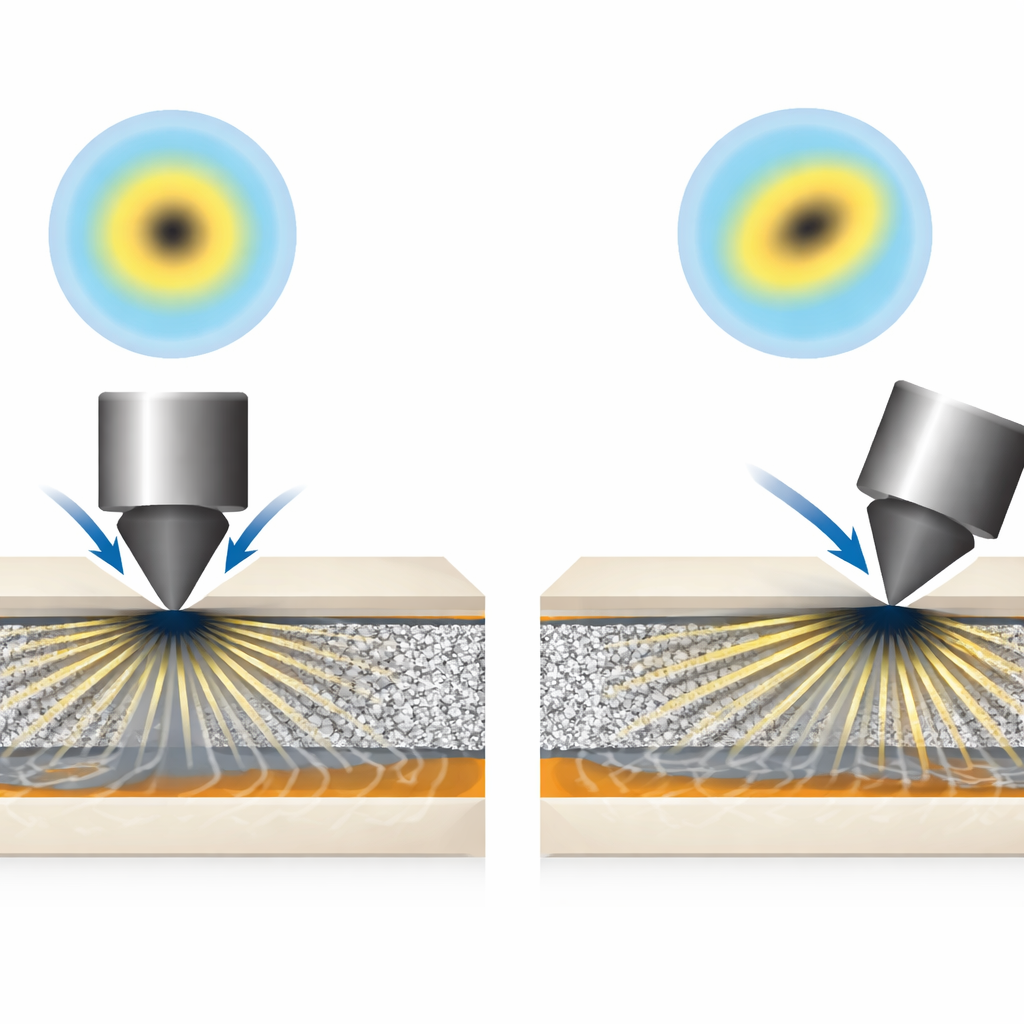
To turn this light imager into a sense of touch, the team added two more layers: a flexible sheet of ultraviolet light‑emitting diodes underneath and a spongy, porous silicone rubber in between. With no pressure, the tiny pores in the rubber scatter the light, producing a soft, fairly uniform glow at the imager. When something presses on the surface, the pores in that region collapse, the material becomes more transparent there, and the pattern of light changes. A straight push creates a more focused spot, while a sliding or angled push shifts that spot sideways. By fitting these changing patterns to simple bell‑shaped curves, the researchers could translate the shape and position of the dark region into the strength of the downward force and the size and direction of sideways forces.
Robotic Touch That Knows Direction
Mounted on a robot finger, the thin sensor could tell whether it was pressing on a ball, the flat side of a cube, an edge, or a sharp corner, and it tracked motion as the finger slid across surfaces. The device sensed normal pressure over a broad range, with fine sensitivity to gentle touch, and detected tiny sideways shifts of only fractions of a micrometer per unit force. It also worked even after parts of the film were deliberately punctured, thanks to its edge‑based measurement method. A computer vision model trained on the reconstructed patterns recognized different contact situations with about 96.5 percent accuracy, showing that the rich, image‑like data can be readily understood by modern artificial intelligence tools.
What This Means for Everyday Life
In simple terms, the researchers have created a flexible, camera‑like touch layer that can be spread over curved surfaces without the usual tangle of wiring. Because it is thin, bendable, and relatively low‑cost to manufacture, it could eventually cover large areas of robot hands, artificial limbs, or clothing‑like health monitors. Beyond robotics, the same technology can map how well sunscreens block ultraviolet light directly on the skin, check surface pressure in medical devices, or add touch awareness to everyday objects. While more work is needed to speed up the system and to sense many contact points at once, this study points toward a future where machines can “feel” the world with a fidelity much closer to our own sense of touch.
Citation: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Keywords: robotic tactile sensing, flexible electronic skin, impedance tomography, 3-axis force sensing, quantum dot imager