Clear Sky Science · es
Imagenador ultraflexible basado en tomografía fotoeléctrica de impedancia para detección táctil robótica en 3 ejes
Robots que realmente pueden sentir
El tacto es uno de los sentidos humanos que los robots aún tienen dificultades para reproducir. Este estudio presenta una “piel” electrónica de grosor papel que permite a los robots sentir no solo cuánta presión aplican, sino también desde qué dirección proviene la fuerza. Al ser blando, flexible e incluso tolerante al daño, este nuevo sensor podría algún día cubrir manos robóticas, dispositivos médicos o aparatos vestibles, dotándolos de una sensación táctil mucho más natural.
Una nueva forma de ver el tacto
La mayoría de los sensores táctiles existentes para robots funcionan como teclados densamente cableados: cada punto de detección necesita su propia conexión. Ese diseño se complica, fragiliza y encarece cuando se escala a grandes superficies, y una sola línea rota puede inutilizar toda una fila o columna. El equipo detrás de este trabajo adoptó un enfoque muy distinto. En lugar de usar una cuadrícula de píxeles individuales, construyeron una película redonda ultrafina con solo 16 contactos metálicos colocados alrededor del borde. La luz que atraviesa el sensor altera cómo fluye la electricidad en su interior, y un ordenador reconstruye una imagen de lo que ocurre en el centro —similar a cómo las exploraciones médicas infieren el contenido interno a partir de medidas en la superficie. Este método, llamado tomografía fotoeléctrica de impedancia, permite a los investigadores “ver” un patrón detallado de claros y oscuros con muchos menos cables.
Una película tan fina como film transparente
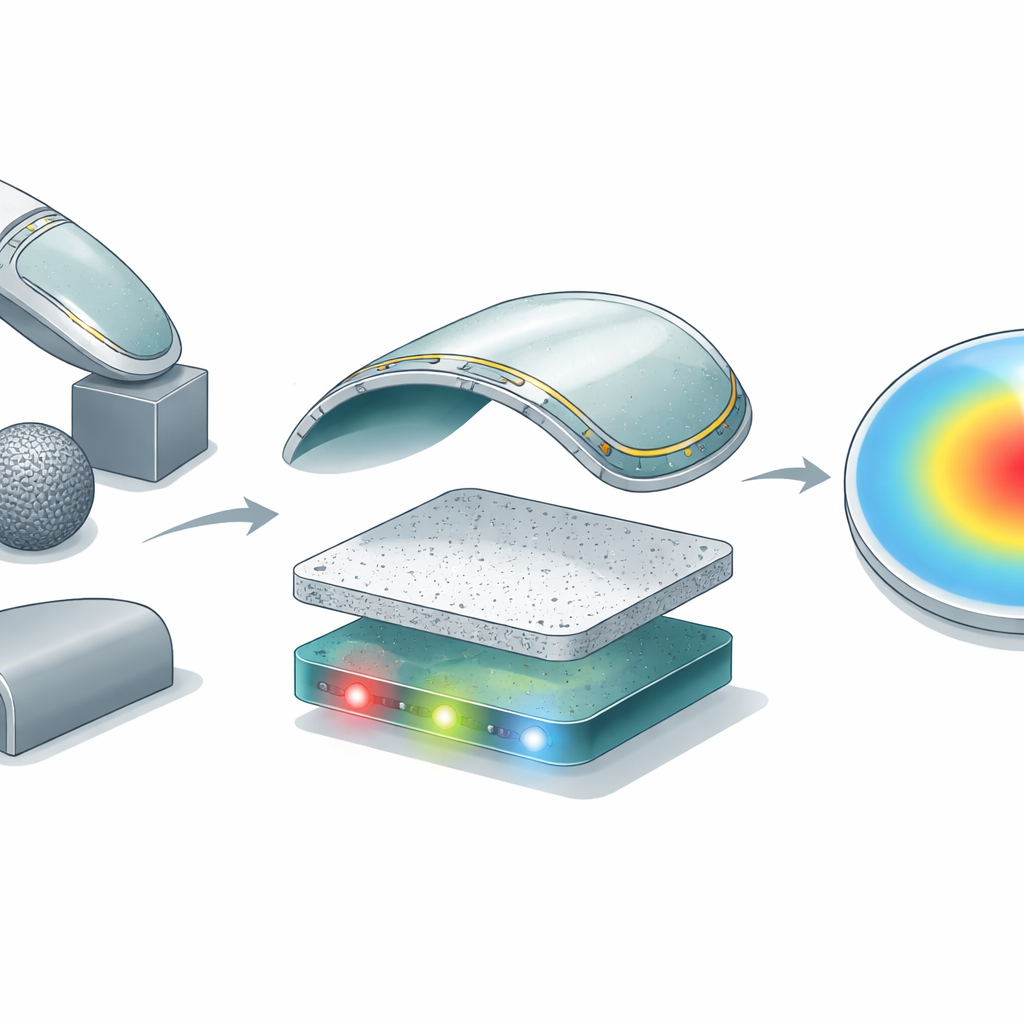
El nuevo imagenador tiene solo unos cinco micrómetros de espesor —muchas veces más fino que un cabello humano— y a la vez combina varias capas cuidadosamente calibradas. Los investigadores formaron una base de plástico ultraflexible, añadieron una película de óxido metálico fotosensible y la recubrieron con puntos cuánticos, diminutos cristales semiconductores que responden fuertemente a la luz ultravioleta y visible. En el borde exterior colocaron pequeños electrodos de aluminio. Cuando la película se ilumina desde abajo, las zonas que reciben más luz conducen la electricidad de manera distinta a las regiones sombreadas. Al enviar corrientes entre pares de electrodos periféricos y medir los voltajes resultantes, el sistema reconstruye un mapa bidimensional de la intensidad luminosa en el centro. Las pruebas mostraron que el dispositivo responde con fuerza a la luz, se mantiene estable durante horas de uso y puede distinguir características separadas por tan solo 1,5 milímetros —incluso cuando se envuelve alrededor de objetos curvos como bolígrafos o se pliega sobre una varilla extremadamente delgada.
Ver mediante presión, no solo luz
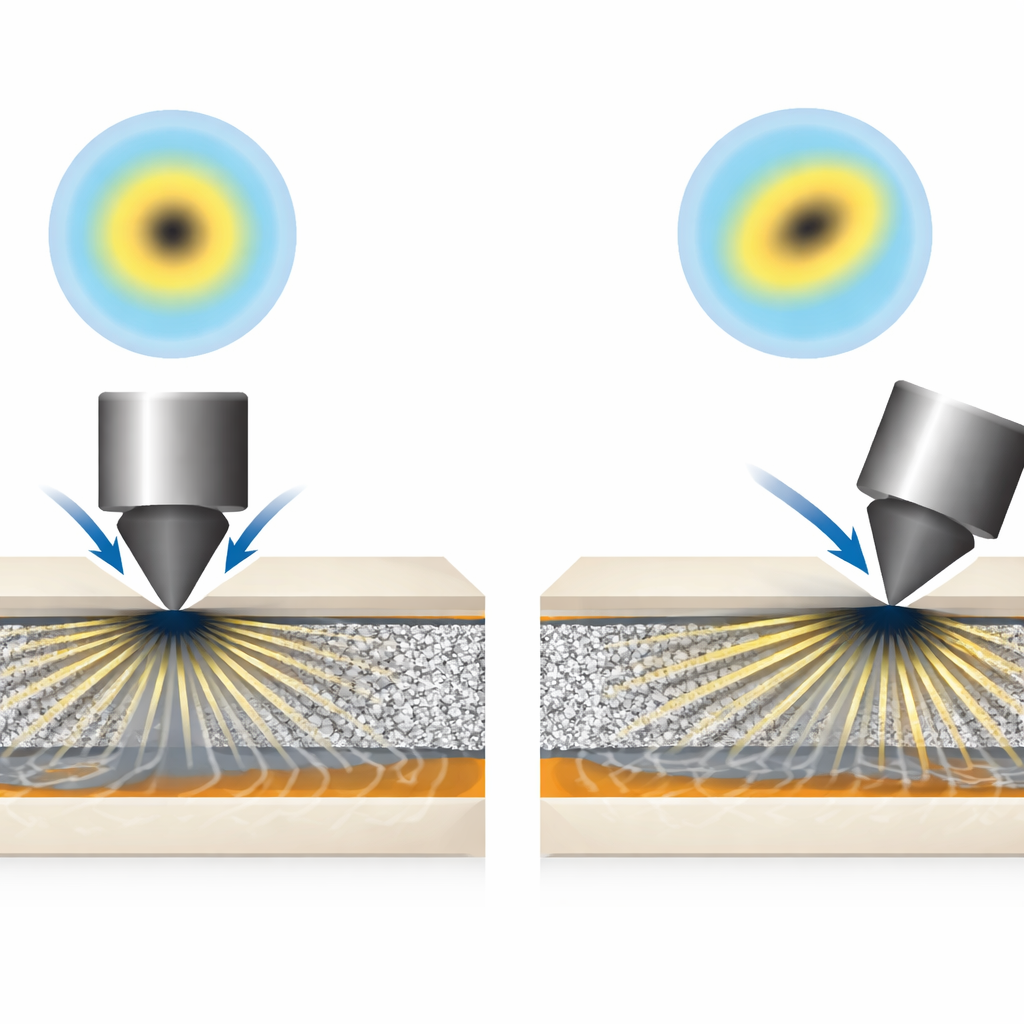
Para convertir este imagenador de luz en un sentido del tacto, el equipo añadió dos capas más: una lámina flexible de diodos emisores de luz ultravioleta por debajo y una goma de silicona esponjosa y porosa en el medio. Sin presión, los pequeños poros de la goma dispersan la luz, produciendo un brillo suave y bastante uniforme en el imagenador. Cuando algo presiona la superficie, los poros de esa región colapsan, el material se vuelve más transparente allí y el patrón de luz cambia. Una presión directa crea un punto más focalizado, mientras que un empuje deslizante o inclinado desplaza ese punto lateralmente. Ajustando estos patrones cambiantes a curvas simples con forma de campana, los investigadores pudieron traducir la forma y posición de la región oscura en la magnitud de la fuerza hacia abajo y en el tamaño y dirección de las fuerzas laterales.
Tacto robótico que reconoce la dirección
Montado en un dedo robótico, el sensor delgado pudo distinguir si presionaba una esfera, el lado plano de un cubo, un borde o una esquina afilada, y siguió el movimiento mientras el dedo se deslizaba por superficies. El dispositivo detectó presión normal en un amplio rango, con sensibilidad fina al tacto suave, y detectó pequeños desplazamientos laterales de solo fracciones de micrómetro por unidad de fuerza. También funcionó incluso después de que partes de la película fueran perforadas deliberadamente, gracias a su método de medición basado en el borde. Un modelo de visión por ordenador entrenado con los patrones reconstruidos reconoció distintas situaciones de contacto con aproximadamente un 96,5% de precisión, lo que demuestra que los ricos datos en forma de imagen pueden ser entendidos fácilmente por las herramientas modernas de inteligencia artificial.
Qué significa esto para la vida cotidiana
En términos sencillos, los investigadores han creado una capa táctil flexible, similar a una cámara, que puede cubrir superficies curvas sin el habitual enredo de cableado. Al ser delgada, flexible y relativamente barata de fabricar, podría eventualmente cubrir grandes áreas de manos robóticas, prótesis o monitores de salud tipo ropa. Más allá de la robótica, la misma tecnología puede mapear cómo bloquean los protectores solares la luz ultravioleta directamente sobre la piel, verificar la presión superficial en dispositivos médicos o añadir conciencia táctil a objetos cotidianos. Aunque se necesita más trabajo para acelerar el sistema y para detectar muchos puntos de contacto a la vez, este estudio apunta hacia un futuro en el que las máquinas puedan “sentir” el mundo con una fidelidad mucho más cercana a nuestro propio sentido del tacto.
Cita: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Palabras clave: detección táctil robótica, piel electrónica flexible, tomografía de impedancia, detección de fuerza en 3 ejes, imagenador de puntos cuánticos