Clear Sky Science · pl
Ultraflexyjny obrazujący czujnik oparty na fotoelektrycznej tomografii impedancyjnej do 3‑osiowego dotykowego czujenia robotycznego
Roboty, które naprawdę potrafią czuć
Dotyk to jedno z ludzkich zmysłów, które robotom wciąż trudno odwzorować. W tym badaniu przedstawiono papierowo‑cienką elektroniczną „skórę”, która pozwala robotom nie tylko wyczuć, jak mocno naciskają, lecz także z jakiego kierunku pochodzi siła. Dzięki miękkości, giętkości i odporności na uszkodzenia nowy czujnik mógłby kiedyś pokrywać dłonie robotów, urządzenia medyczne lub urządzenia noszone, nadając im znacznie bardziej naturalne odczucie dotyku.
Nowy sposób „widzenia” dotyku
Większość istniejących czujników dotyku dla robotów działa jak mocno okablowane klawiatury: każdy drobny punkt pomiarowy potrzebuje własnego połączenia. Taka konstrukcja staje się skomplikowana, podatna na uszkodzenia i kosztowna przy skali do dużych powierzchni, a jedno przerwane połączenie może wyłączyć cały rząd lub kolumnę. Zespół stojący za tym projektem obrał zupełnie inne podejście. Zamiast siatki indywidualnych pikseli zbudowali okrągłą, ultracienką folię z zaledwie 16 metalowymi stykami umieszczonymi na obwodzie. Światło padające przez sensor zmienia sposób przepływu prądu wewnątrz niego, a komputer rekonstruuje obraz tego, co dzieje się w środku — podobnie jak w skanach medycznych, które wnioskują o wnętrzu ciała na podstawie pomiarów na powierzchni. Ta metoda, zwana fotoelektryczną tomografią impedancyjną, pozwala badaczom „zobaczyć” szczegółowy wzór jasnych i ciemnych obszarów przy znacznie mniejszej liczbie przewodów.
Folia cienka jak folia spożywcza
Nowy obrazownik ma zaledwie około pięciu mikrometrów grubości — wielokrotnie cieńszy niż ludzki włos — a mimo to łączy kilka starannie dobranych warstw. Badacze utworzyli ultrafleksyjną polimerową podstawkę, nałożyli światłoczułą warstwę tlenku metalu, a następnie pokryli ją kropkami kwantowymi, maleńkimi kryształkami półprzewodnika silnie reagującymi na światło ultrafioletowe i widzialne. Na zewnętrznym obrzeżu umieszczono małe elektrody z aluminium. Gdy folia jest oświetlona od spodu, obszary otrzymujące więcej światła przewodzą prąd inaczej niż zacienione rejony. Poprzez wysyłanie prądów między parami elektrod brzegowych i pomiar powstałych napięć, system rekonstruuje dwuwymiarową mapę natężenia światła w centrum. Testy wykazały, że urządzenie silnie reaguje na światło, pozostaje stabilne podczas godzinnego użytkowania i potrafi rozróżnić cechy oddalone od siebie o zaledwie 1,5 milimetra — nawet gdy jest owinięte wokół krzywizn, takich jak długop, lub zgięte na cienkim jak igła pręcie.
Widzenie przez nacisk, nie tylko przez światło
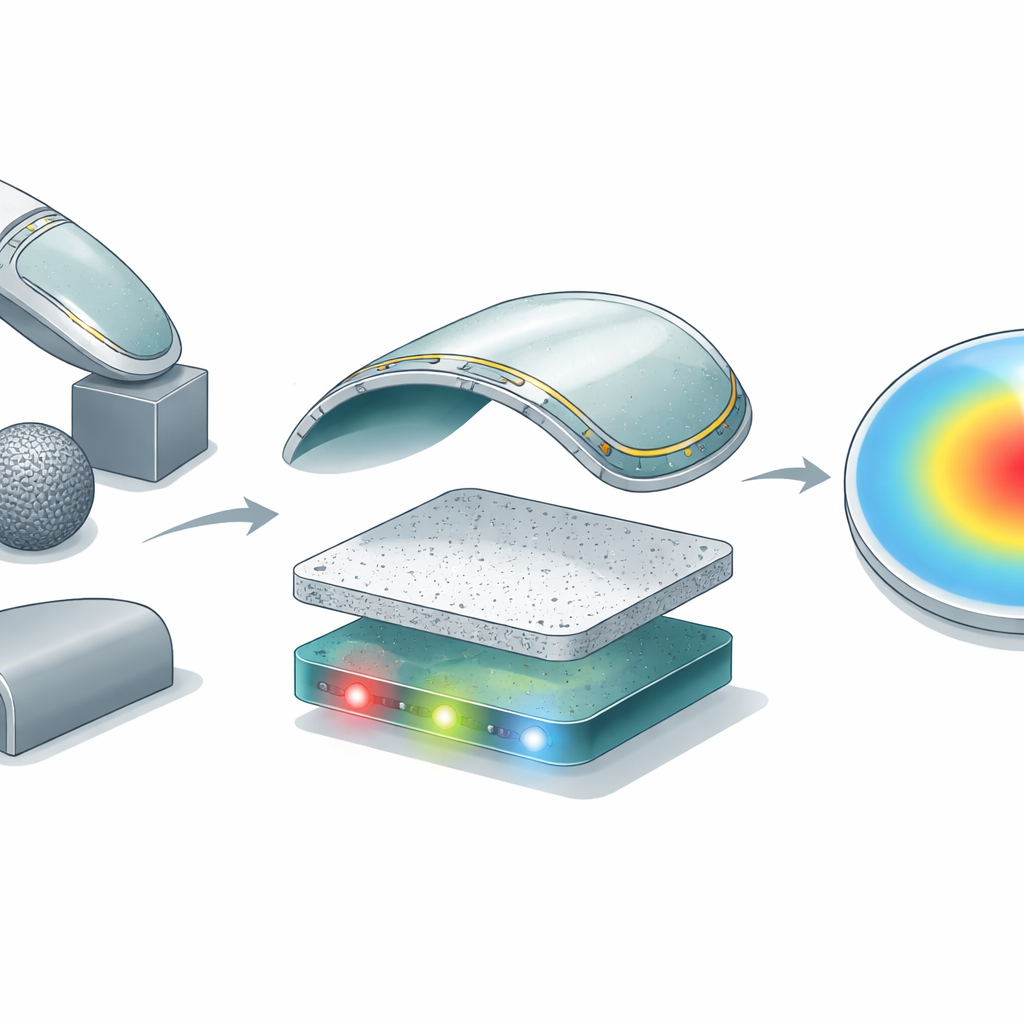
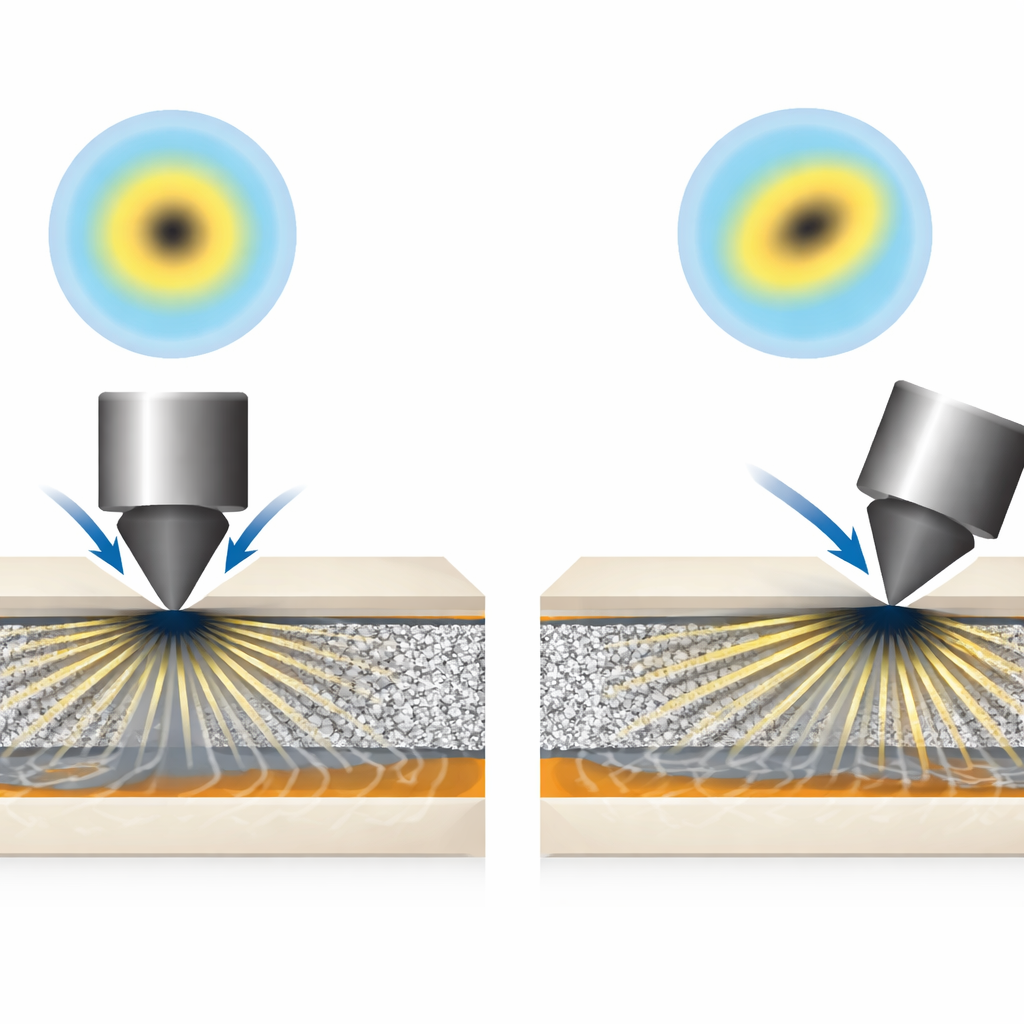
Aby przekształcić ten obrazownik światła w zmysł dotyku, zespół dodał dwie kolejne warstwy: elastyczną matrycę diod emitujących ultrafiolet poniżej i porowatą, gąbczastą warstwę silikonu między nimi. Przy braku nacisku małe pory w gumie rozpraszają światło, tworząc miękkie, stosunkowo jednolite świecenie na obrazowniku. Gdy coś naciska na powierzchnię, pory w tym obszarze zapadają się, materiał staje się tam bardziej przezroczysty, a wzór światła się zmienia. Proste pchnięcie tworzy bardziej skoncentrowaną plamkę, podczas gdy przesuwający się lub ukośny nacisk przesuwa tę plamkę na boki. Dopasowując zmieniające się wzory do prostych krzywych dzwonowych, badacze potrafili przekształcić kształt i położenie ciemnego obszaru w wartość siły nacisku w dół oraz w wielkość i kierunek sił bocznych.
Dotyk robota, który rozpoznaje kierunek
Zamontowany na palcu robota cienki czujnik potrafił rozróżnić, czy naciska na piłkę, płaską stronę sześcianu, krawędź czy ostry narożnik, i śledził ruch, gdy palec przesuwał się po powierzchniach. Urządzenie wykrywało nacisk normalny w szerokim zakresie, z delikatną czułością na lekkie dotknięcia, a także rejestrowało minimalne przesunięcia boczne rzędu ułamków mikrometra na jednostkę siły. Działało również po celowym nakłuciu części folii, dzięki metodzie pomiaru opartej na brzegach. Model widzenia komputerowego wytrenowany na zrekonstruowanych wzorach rozpoznawał różne sytuacje kontaktowe z około 96,5‑procentową dokładnością, co pokazuje, że bogate, obrazopodobne dane można łatwo analizować za pomocą nowoczesnych narzędzi sztucznej inteligencji.
Co to oznacza dla codziennego życia
Mówiąc prosto, badacze stworzyli elastyczną, przypominającą kamerę warstwę dotykową, którą można rozciągnąć na zakrzywione powierzchnie bez typowego plątaniny przewodów. Ponieważ jest cienka, giętka i stosunkowo niedroga w produkcji, mogłaby w przyszłości pokrywać duże obszary dłoni robotów, sztucznych kończyn czy noszalnych monitorów zdrowia przypominających ubranie. Poza robotyką ta sama technologia może mapować, jak dobrze kremy z filtrem blokują promieniowanie UV bezpośrednio na skórze, kontrolować ciśnienie powierzchni w urządzeniach medycznych lub dodać świadomość dotyku do przedmiotów codziennego użytku. Chociaż potrzeba dalszych prac, by przyspieszyć działanie systemu i jednocześnie wykrywać wiele punktów kontaktu, badanie to wskazuje drogę ku przyszłości, w której maszyny będą „czuć” świat z precyzją znacznie bliższą naszemu własnemu zmysłowi dotyku.
Cytowanie: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Słowa kluczowe: robotyczne czujenie dotyku, elastyczna elektroniczna skóra, tomografia impedancyjna, pomiar siły w 3 osiach, obrazownik z kropkami kwantowymi