Clear Sky Science · ru
Ультра-гибкий имиджер на основе фотоэлектрической томографии импеданса для трёхосного роботизированного тактильного восприятия
Роботы, которые действительно могут чувствовать
Осязание — одно из человеческих чувств, которое роботам по-прежнему трудно воспроизвести. В этом исследовании представлена бумажно-тонкая электронная «кожа», позволяющая роботам ощущать не только силу нажатия, но и направление приложенной силы. Поскольку сенсор мягкий, гибкий и даже устойчив к повреждениям, он в перспективе может покрывать руки роботов, медицинские приборы или носимые устройства, обеспечивая им более естественное чувство прикосновения.
Новый способ «увидеть» прикосновение
Большинство существующих сенсоров для роботов работают как плотно проводящие клавиатуры: каждая малая точка требует отдельного подключения. Такая конструкция усложняется, становится хрупкой и дорогой при масштабировании на большие площади, и один оборванный провод может вывести из строя целый ряд или столбец. Команда авторов пошла совсем другим путём. Вместо сетки отдельных пикселей они создали круглую ультратонкую плёнку с всего 16 металлическими контактами по периферии. Свет, проходящий через сенсор, изменяет распределение электрического тока внутри, а компьютер реконструирует изображение происходящего в центре — аналогично тому, как медицинские томографии делают выводы о внутреннем содержимом тела по измерениям на поверхности. Этот метод, называемый фотоэлектрической импедансной томографией, позволяет исследователям «видеть» подробный узор светлых и тёмных областей при значительно меньшем количестве проводов.
Плёнка толщиной с пищевую плёнку
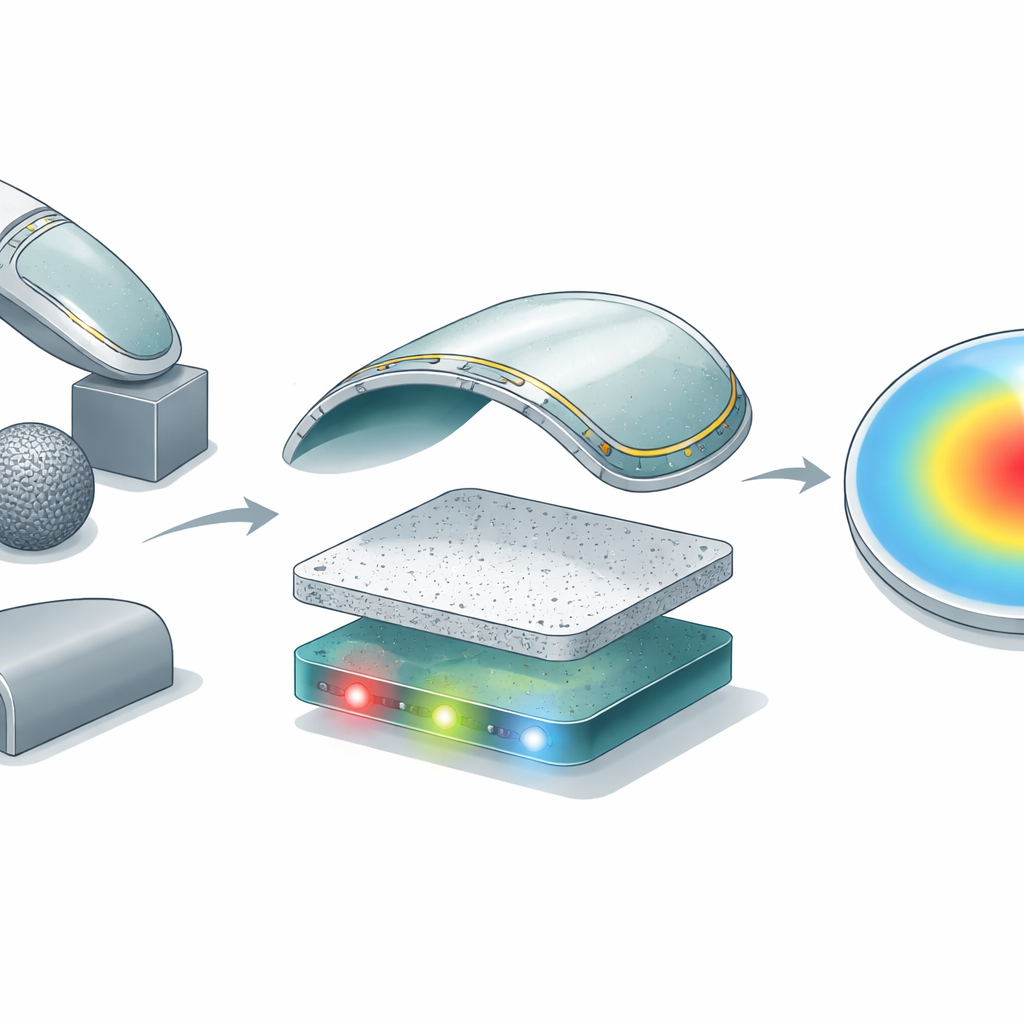
Новый имиджер имеет толщину примерно пять микрометров — во много раз тоньше человеческого волоса — при этом он сочетает несколько тщательно подобранных слоёв. Исследователи сформировали ультра-гибкую пластиковую подложку, нанесли светочувствительный металл-оксидный слой и затем покрыли его квантовыми точками — крошечными полупроводниковыми кристаллами, сильно реагирующими на ультрафиолет и видимый свет. По внешнему краю расположили небольшие алюминиевые электроды. При подсветке снизу участки, получающие больше света, проводят электричество иначе, чем затенённые области. Посылая ток между парами периферийных электродов и измеряя получающиеся напряжения, система реконструирует двумерную карту интенсивности света в центре. Испытания показали, что устройство сильно реагирует на свет, остаётся стабильным в течение часов работы и может различать детали на расстоянии до 1,5 миллиметра друг от друга — даже когда его оборачивают вокруг изогнутых объектов, таких как ручки, или сгибают над тонким стержнем.
Видеть через давление, а не только через свет
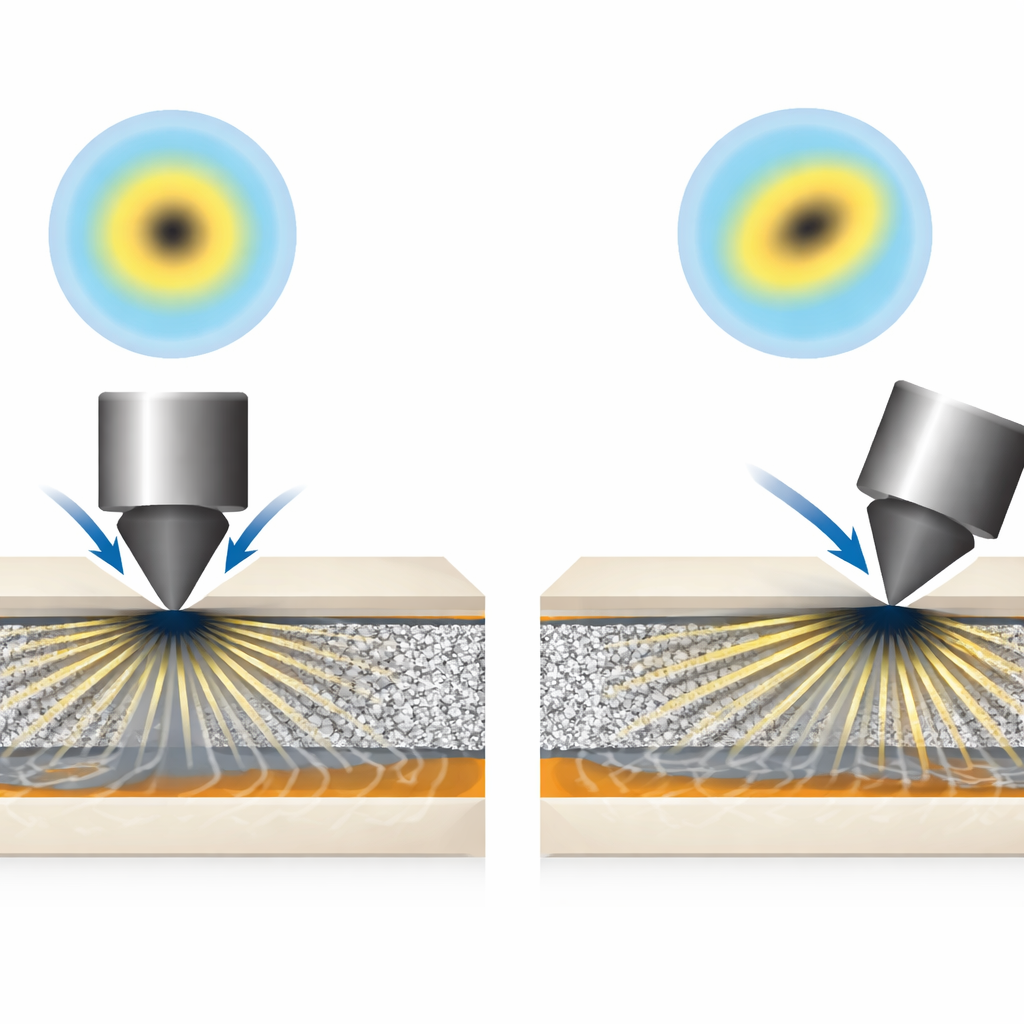
Чтобы превратить световой имиджер в тактильный датчик, команда добавила два дополнительных слоя: гибкую матрицу ультрафиолетовых светодиодов снизу и губчатую пористую силиконовую резину между ними. Без давления мелкие поры в резине рассеивают свет, создавая мягкое, относительно равномерное свечение на имиджере. Когда что-то давит на поверхность, поры в этой области схлопываются, материал там становится более прозрачным, и узор света меняется. Прямое нажатие даёт более сфокусированное пятно, тогда как сдвиг или нажатие под углом смещают это пятно в сторону. Адаптируя эти меняющиеся узоры под простые колоколообразные кривые, исследователи переводили форму и положение тёмной области в силу нормального нажатия и величину и направление боковых сил.
Роботизированное осязание, которое определяет направление
Установленный на пальце робота тонкий сенсор мог различать, нажимает ли он на шар, плоскую грань куба, кромку или острый угол, и отслеживал движение при скольжении пальца по поверхности. Устройство чувствовало нормальное давление в широком диапазоне, имело высокую чувствительность к деликатным прикосновениям и выявляло крошечные боковые сдвиги — доли микрометра на единицу силы. Оно также работало даже после того, как часть плёнки была намеренно проколота, благодаря краевому методу измерения. Модель компьютерного зрения, обученная на реконструированных паттернах, распознавала различные ситуации контакта с примерно 96,5-процентной точностью, что показывает: богатые, похожие на изображения данные легко интерпретируются современными инструментами искусственного интеллекта.
Что это значит для повседневной жизни
Проще говоря, исследователи создали гибкий слой, похожий на камеру, который можно растянуть по изогнутым поверхностям без привычной путаницы проводов. Поскольку он тонкий, гибкий и относительно недорог в производстве, он в перспективе может покрывать большие площади на руках роботов, искусственных протезах или носимых устройствах для мониторинга здоровья. Помимо робототехники, та же технология может картировать, насколько эффективно солнцезащитные средства блокируют ультрафиолет прямо на коже, проверять распределение давления на поверхности в медицинских приборах или добавлять тактильную осведомлённость в повседневные предметы. Хотя предстоит ещё работа по ускорению системы и по одновременному определению множества точек контакта, это исследование указывает на будущее, в котором машины смогут «чувствовать» мир с точностью, гораздо ближе к нашему собственному осязанию.
Цитирование: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Ключевые слова: роботизированное тактильное восприятие, гибкая электронная кожа, томография импеданса, измерение силы по 3 осям, имиджер на квантовых точках