Clear Sky Science · it
Immaginatore basato su tomografia di impedenza fotoelettrica ultraflessibile per il rilevamento tattile robotico a 3 assi
Robot che possono davvero percepire
Il tatto è uno dei sensi umani che i robot faticano ancora a riprodurre. Questo studio presenta una “pelle” elettronica spessa come carta che permette ai robot di percepire non solo quanto forte premono, ma anche da quale direzione proviene la forza. Essendo morbido, pieghevole e tollerante ai danni, questo nuovo sensore potrebbe un giorno rivestire mani robotiche, dispositivi medici o gadget indossabili, conferendo loro un senso del tatto molto più naturale.
Un nuovo modo di vedere il tatto
La maggior parte dei sensori tattili esistenti per robot funziona come tastiere densamente cablate: ogni punto di rilevamento richiede la propria connessione. Questo approccio diventa complesso, fragile e costoso quando viene esteso a grandi superfici, e una singola linea interrotta può compromettere un’intera riga o colonna. Il team dietro questo lavoro ha adottato un approccio molto diverso. Invece di usare una griglia di pixel individuali, hanno costruito una pellicola rotonda e ultrafine con solo 16 contatti metallici posizionati sul bordo. La luce che attraversa il sensore modifica il modo in cui l’elettricità scorre al suo interno, e un computer ricostruisce un’immagine di ciò che avviene al centro—simile a come le scansioni mediche deducono cosa c’è all’interno del corpo a partire da misure in superficie. Questo metodo, chiamato tomografia di impedenza fotoelettrica, permette ai ricercatori di “vedere” uno schema dettagliato di luci e ombre con molte meno connessioni.
Una pellicola sottile come la pellicola da cucina
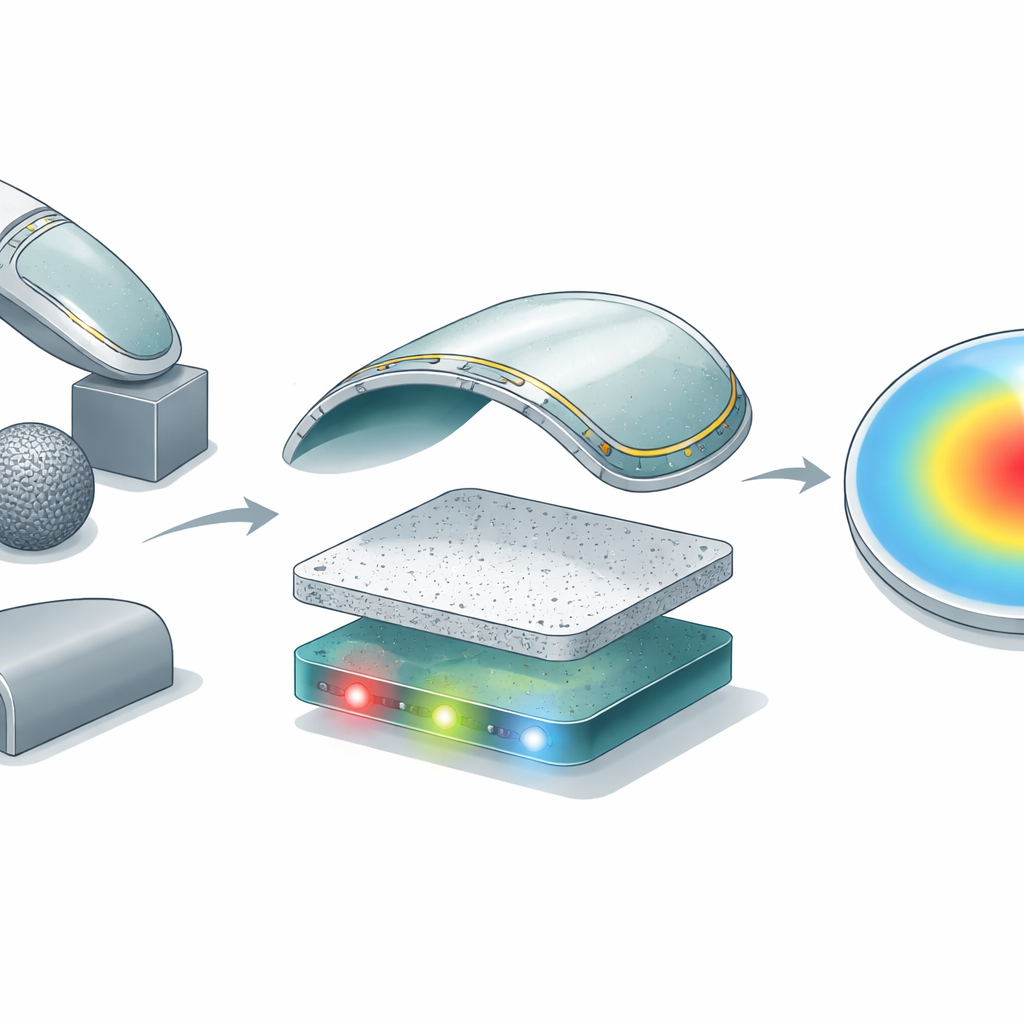
Il nuovo immaginatore è spesso solo circa cinque micrometri—molte volte più sottile di un capello umano—e combina però diversi strati ottimizzati. I ricercatori hanno formato una base plastica ultraflessibile, aggiunto un film fotosensibile a ossido metallico e quindi lo hanno rivestito con punti quantici, minuscoli cristalli semiconduttori che rispondono fortemente alla luce ultravioletta e visibile. Intorno al bordo esterno hanno collocato piccoli elettrodi in alluminio. Quando la pellicola è illuminata dal basso, le aree che ricevono più luce conducono elettricità in modo diverso rispetto alle zone in ombra. Inviando correnti tra coppie di elettrodi sul bordo e misurando le tensioni risultanti, il sistema ricostruisce una mappa bidimensionale dell’intensità luminosa al centro. I test hanno mostrato che il dispositivo risponde fortemente alla luce, rimane stabile per ore di funzionamento e può distinguere caratteristiche distanti anche solo 1,5 millimetri—anche quando avvolto attorno a oggetti curvi come penne o piegato su un’asta sottile come un ago.
Vedendo attraverso la pressione, non solo la luce
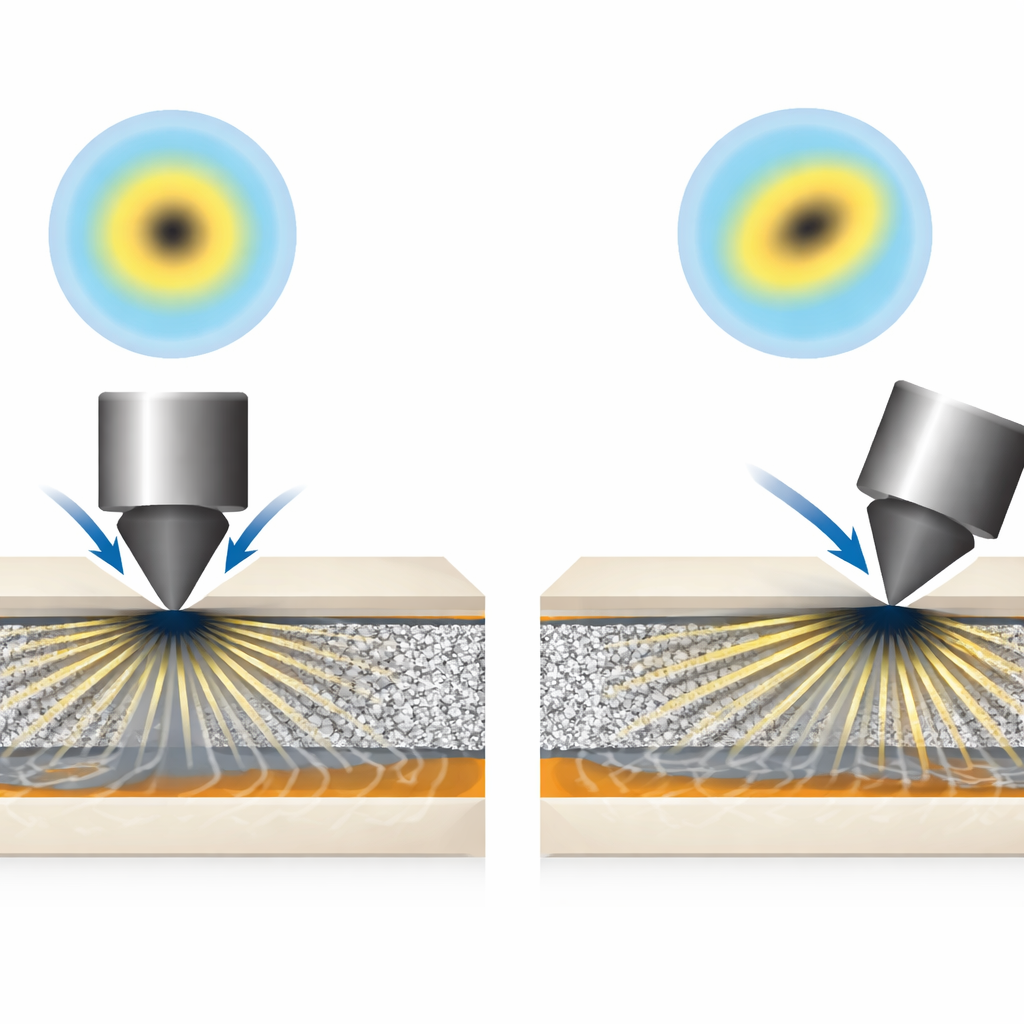
Per trasformare questo immaginatore luminoso in un senso del tatto, il team ha aggiunto altri due strati: una sottile matrice flessibile di diodi emettitori di luce ultravioletta sotto e una gomma di silicone spugnosa e porosa in mezzo. In assenza di pressione, i minuscoli pori nella gomma diffondono la luce, producendo un bagliore morbido e abbastanza uniforme sul sensore. Quando qualcosa preme sulla superficie, i pori nella regione interessata collassano, il materiale diventa più trasparente lì e il pattern di illuminazione cambia. Una pressione perpendicolare crea una macchia più concentrata, mentre una spinta scorrevole o angolata sposta quella macchia lateralmente. Adeguando questi pattern variabili a semplici curve a campana, i ricercatori sono stati in grado di tradurre la forma e la posizione della regione scura nella forza verso il basso e nelle dimensioni e direzione delle forze laterali.
Tatto robotico che riconosce la direzione
Montato su un dito robotico, il sottile sensore riusciva a distinguere se premeva su una palla, sul lato piatto di un cubo, su un bordo o su un angolo appuntito, e seguiva il movimento mentre il dito scivolava sulle superfici. Il dispositivo rilevava la pressione normale su un ampio intervallo, con buona sensibilità al tocco delicato, e individuava piccoli spostamenti laterali di appena frazioni di micrometro per unità di forza. Funzionava anche dopo che parti della pellicola erano state deliberatamente perforate, grazie al metodo di misura basato sul bordo. Un modello di visione artificiale addestrato sui pattern ricostruiti ha riconosciuto diverse situazioni di contatto con circa il 96,5 percento di accuratezza, dimostrando che i dati ricchi e simili a immagini possono essere facilmente interpretati dagli strumenti di intelligenza artificiale moderni.
Cosa significa per la vita quotidiana
In termini semplici, i ricercatori hanno creato uno strato tattile flessibile, simile a una videocamera, che può essere steso su superfici curve senza l’ingombro usuale dei cablaggi. Essendo sottile, pieghevole e relativamente economico da produrre, potrebbe infine rivestire ampie aree di mani robotiche, arti artificiali o monitor per la salute simili a indumenti. Oltre la robotica, la stessa tecnologia può mappare direttamente sulla pelle quanto efficacemente le creme solari bloccano i raggi ultravioletti, controllare la pressione superficiale in dispositivi medici o aggiungere consapevolezza tattile agli oggetti di uso quotidiano. Pur richiedendo ulteriori miglioramenti per accelerare il sistema e rilevare molti punti di contatto contemporaneamente, questo studio indica un futuro in cui le macchine possono “sentire” il mondo con una fedeltà molto più vicina al nostro senso del tatto.
Citazione: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Parole chiave: rilevamento tattile robotico, pelle elettronica flessibile, tomografia di impedenza, rilevamento della forza a 3 assi, immagine con punti quantici