Clear Sky Science · he
חיישן דימות התנגדות פוטואלקטרי על-גמיש מאוד לגילוי מישוש רובוטי בתלת־צירים
רובוטים שיכולים באמת להרגיש
מישוש הוא אחד החושים האנושיים שהרובוטים עדיין מתקשים לשכפל. המחקר מציג "עור" אלקטרוני בעובי נייר שמאפשר לרובוטים להרגיש לא רק עד כמה הם לוחצים, אלא גם מאיזה כיוון מגיעה הכוח. מאחר שהוא רך, ניתן לכופף אותו ואפילו עמיד לנזק جزئي, החיישן החדש עשוי יום אחד לכסות ידיים רובוטיות, מכשירים רפואיים או גאדג'טים לבישים, ולהעניק להם תחושה הרבה יותר טבעית של מישוש.
דרך חדשה לראות מישוש
מרבית החיישנים למישוש הקיימים לרובטים פועלים כמו מקלדת צפופה: לכל נקודת חישה קטנה יש חיבור משלה. תכנון כזה מסתבך, רגיש ויקר כאשר מגדילים אותו לשטחים גדולים, וקו אחד שבור יכול לשתק שורה או טור שלם. הצוות מאחורי העבודה נקט בגישה שונה מאוד. במקום להשתמש ברשת פיקסלים נפרדת, הם בנו סרט עגול דק במיוחד עם רק 16 מגעי מתכת הממוקמים סביב היקף. אור החודר דרך החיישן משנה את אופן זרימת החשמל בתוכו, והמחשב משחזר תמונה של מה שמתרחש במרכז—בדומה לאופן שבו סריקות רפואיות מסיקות מה יש בתוך הגוף באמצעות מדידות על פני השטח. שיטה זו, הקרויה דימות התנגדות פוטואלקטרי, מאפשרת לחוקרים "לראות" דפוס מפורט של אזורים מוארים ומוצלים עם הרבה פחות חוטים.
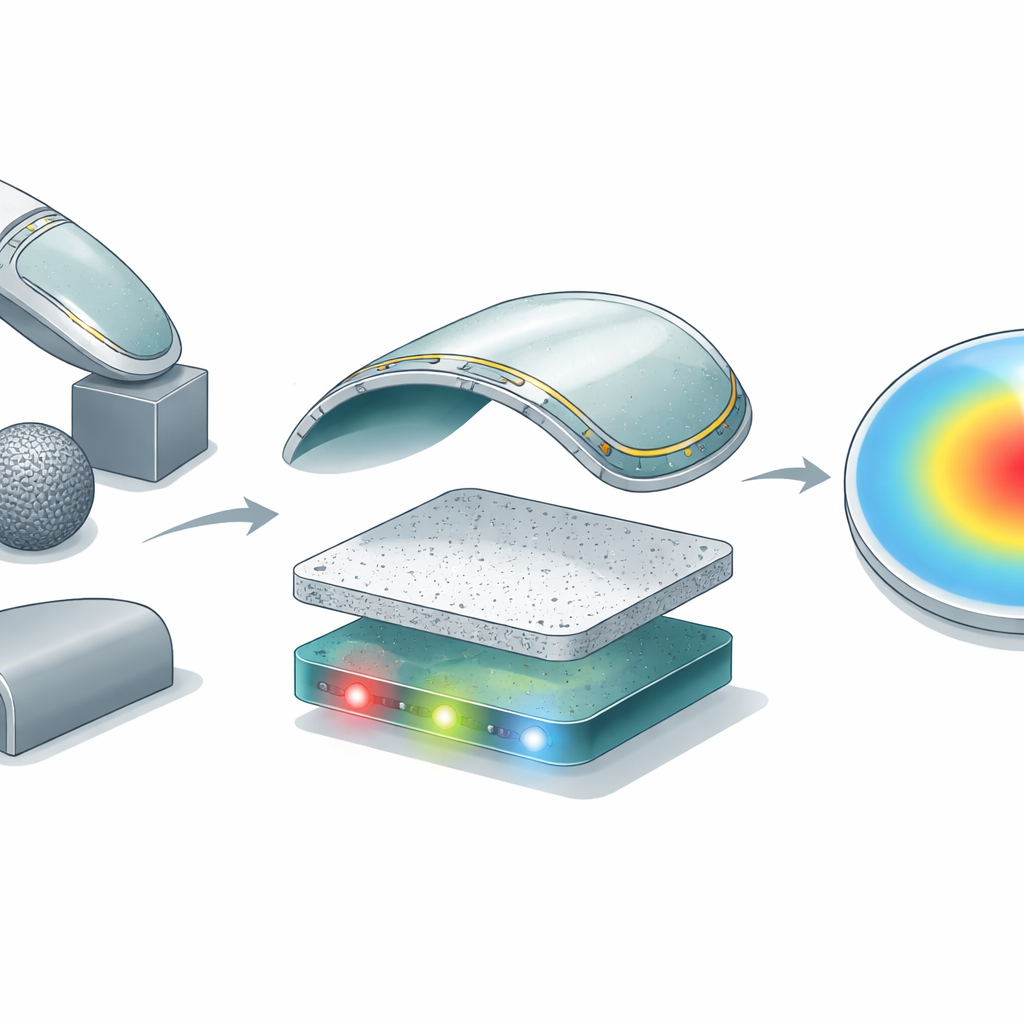
סרט דק כמו ניילון נצמד
המצליב החדש עבה רק ככחמישה מיקרומטרים—דק בהרבה משערת אדם—ועדיין משלב מספר שכבות מכויילות היטב. החוקרים יצרו בסיס פלסטי על־גמיש מאוד, הוסיפו סרט מתכתי‑חמצני רגיש לאור, ואז ציפו אותו בנקודות קוונטיות, גבישים מוליכים למחצה זעירים שמגיבים בעוצמה לאור אולטרה‑סגול ולראות. סביב היקף החלק החיצוני הם מקמו אלקטרודות אלומיניום קטנות. כאשר הסרט מואר מתחתיו, אזורים המקבלים יותר אור מוליכים חשמל באופן שונה מאזורים מוצלים. על ידי שליחת זרמים בין זוגות אלקטרודות בקצה ומדידת המתח הנובע, המערכת משחזרת מפת שני‑מימדית של עוצמת האור במרכז. בדיקות הראו שהמהרה מגיבה בעוצמה לאור, נשארת יציבה במשך שעות שימוש, ויכולה להבחין בפרטים במרחק של 1.5 מילימטרים זה מזה—אפילו כשהיא עוטפת עצמים מעוקלים כמו עט או מכופפת סביב מוט דק כמחט.
לראות דרך לחץ, לא רק אור
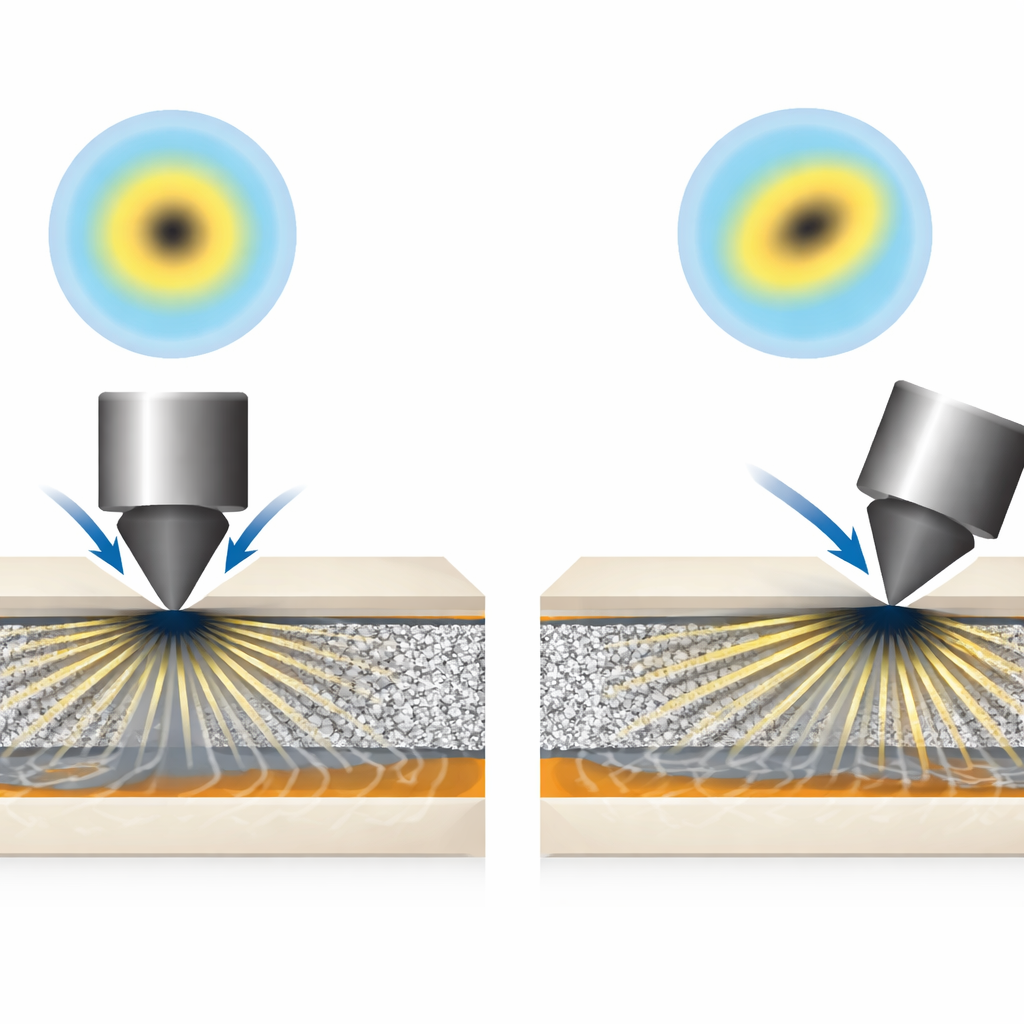
כדי להפוך את גלאי האור לחוש מישוש, הוסיפו הצוות שתי שכבות נוספות: גיליון גמיש של דיודות פולטות אולטרה‑סגול מתחתיו ושכבה ספוגית, סיליקון דמוי-פורי באמצע. ללא לחץ, הנקבוביות הזעירות ברubber מפזרות את האור, ויוצרות זוהר רך ויחסית אחיד על המצליב. כאשר משהו לוחץ על המשטח, הנקבוביות באזור זה מתמוטטות, החומר נעשה שם שקוף יותר ודפוס האור משתנה. דחיפה ישירה יוצרת כתם מרוכז יותר, בעוד דחיפה החלקה או בזווית מזיזה את הכתם הצידה. על ידי התאמת דפוסי השינוי הללו לעקומות פעמוניות פשוטות, הצליחו החוקרים לתרגם את צורתו ומיקומו של האזור המוצל לעוצמת הכוח כלפי מטה וגודל וכיוון הכוחות הצידיים.
מישוש רובוטי שמבין כיוון
מוצמד לאצבע רובוטית, החיישן הדק יכול היה לזהות אם הוא לוחץ על כדור, על הצד החרוטי של קוביה, על קצה או על פינה חדה, ומעקב אחר תנועה כשהאצבע החלקה על פני משטחים. המכשיר חשה לחץ נורמלי בטווח רחב, עם רגישות טובה למישוש עדין, וגילתה הזזות צידיות זעירות של שברים של מיקרומטר ליחידת כוח. הוא פעל גם לאחר שחלקי הסרט נחטבו בכוונה, בזכות שיטת המדידה המבוססת על הקצה. מודל ראייה ממוחשבת שאומן על הדפוסים המשוחזרים זיהה מצבי מגע שונים בדיוק של כ‑96.5 אחוז, מה שמדגים שהמידע העשיר בדמות תמונה ניתן להבנה בקלות על ידי כלי בינה מלאכותית מודרניים.
מה זה אומר לחיי היומיום
במונחים פשוטים, החוקרים יצרו שכבת מישוש גמישה בדומה למצלמה שניתן לפרוס על פני משטחים מעוקלים ללא הסתבכות חוטים. מאחר שהיא דקה, גמישה ויחסית זולה לייצור, היא עשויה בסופו של דבר לכסות שטחים גדולים של ידיים רובוטיות, גפיים מלאכותיות או מדדי בריאות לבישים בדמוי בגד. מעבר לרובוטיקה, אותה טכנולוגיה יכולה למפות כמה קרמים נגד שמש חוסמים קרינה אולטרה‑סגולה ישירות על העור, לבדוק לחץ משטח במכשירים רפואיים או להוסיף מודעות מישוש לאובייקטים יום‑יומיים. בעוד שעוד יש צורך בעבודה להאיץ את המערכת ולחוש נקודות מגע מרובות בו‑זמנית, המחקר מצביע על עתיד שבו מכונות יוכלו "להרגיש" את העולם ברזולוציה הקרובה הרבה יותר לחוש המישוש שלנו.
ציטוט: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
מילות מפתח: גילוי מישוש רובוטי, עור אלקטרוני גמיש, דימות התנגדות, חישת כוח בתלת‑צירים, גלאי נקודות קוונטיות