Clear Sky Science · pt
Imagem ultraflexível baseada em tomografia fotoelétrica de impedância para sensoriamento tátil robótico em 3 eixos
Robôs que Realmente Sentem
O tato é um dos sentidos humanos que os robôs ainda têm dificuldade em reproduzir. Este estudo apresenta uma “pele” eletrônica com espessura de papel que permite aos robôs sentir não apenas a intensidade da pressão, mas também de que direção a força provém. Por ser macio, flexível e até tolerante a danos, esse novo sensor pode, um dia, revestir mãos robóticas, dispositivos médicos ou aparelhos vestíveis, conferindo-lhes uma sensação de toque muito mais natural.
Uma Nova Maneira de Ver o Toque
A maioria dos sensores táteis existentes para robôs funciona como teclados fortemente cabeados: cada ponto sensorial precisa de sua própria conexão. Esse projeto se torna complicado, frágil e caro quando ampliado para grandes áreas, e uma linha rompida pode derrubar uma fileira ou coluna inteira. A equipe por trás deste trabalho adotou uma abordagem bem diferente. Em vez de usar uma grade de pixels individuais, eles construíram um filme arredondado e ultrafino com apenas 16 contatos metálicos colocados ao redor da borda. A luz que atravessa o sensor muda a forma como a eletricidade flui dentro dele, e um computador reconstrói uma imagem do que acontece no centro — semelhante a como exames médicos inferem o interior do corpo a partir de medições na superfície. Esse método, chamado tomografia fotoelétrica de impedância, permite aos pesquisadores “ver” um padrão detalhado de claro e escuro com muito menos fios.
Um Filme Tão Fino Quanto Filme Plástico
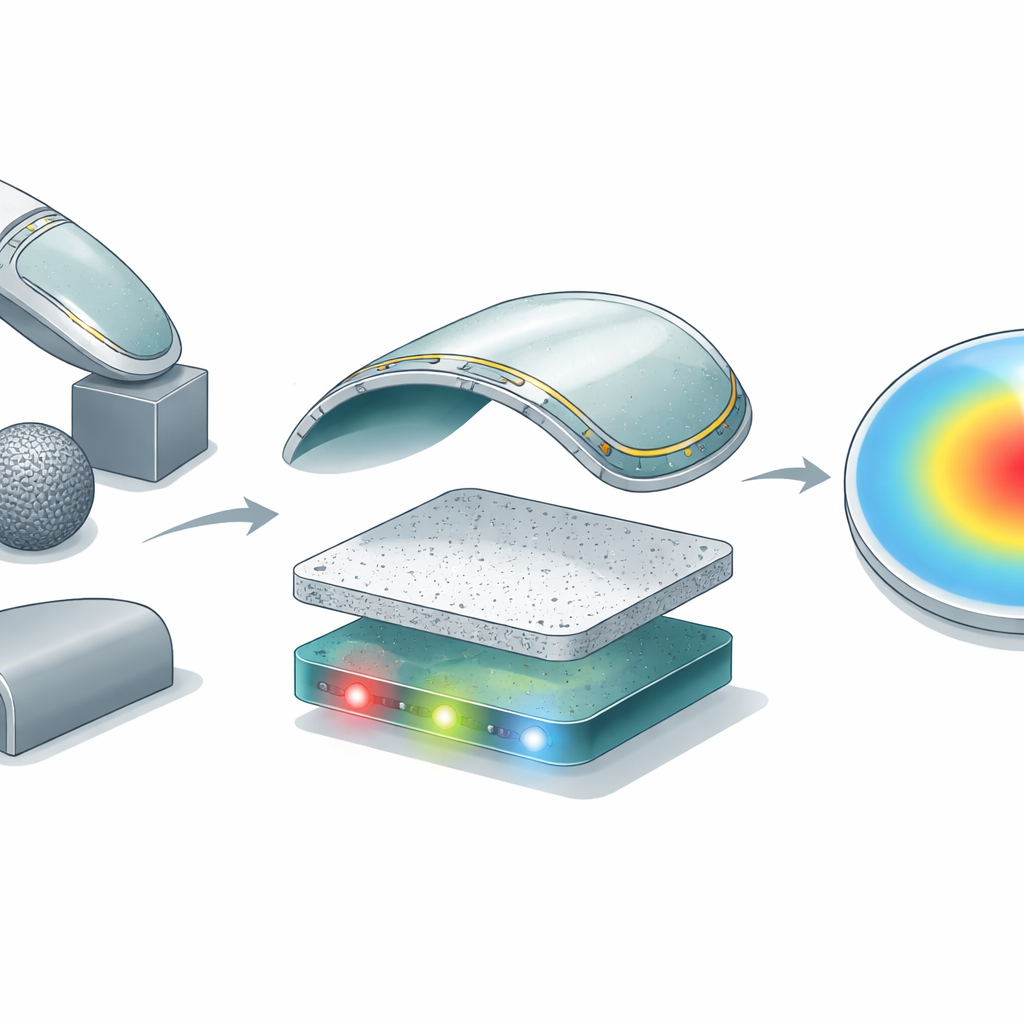
O novo imager tem apenas cerca de cinco micrômetros de espessura — muitas vezes mais fino que um fio de cabelo humano — e combina várias camadas cuidadosamente ajustadas. Os pesquisadores formaram uma base plástica ultraflexível, adicionaram um filme sensível à luz feito de óxido metálico e, em seguida, revestiram-no com pontos quânticos, minúsculos cristais semicondutores que respondem fortemente à luz ultravioleta e visível. Ao redor do aro externo colocaram pequenos eletrodos de alumínio. Quando o filme é iluminado por baixo, áreas que recebem mais luz conduzem eletricidade de maneira diferente das regiões sombreada. Ao enviar correntes entre pares de eletrodos de borda e medir as tensões resultantes, o sistema reconstrói um mapa bidimensional da intensidade da luz no centro. Testes mostraram que o dispositivo responde fortemente à luz, permanece estável durante horas de uso e consegue distinguir feições tão próximas quanto 1,5 milímetros — mesmo quando enrolado em objetos curvos como canetas ou dobrado sobre um eixo tão fino quanto uma agulha.
Ver Através da Pressão, Não Apenas da Luz
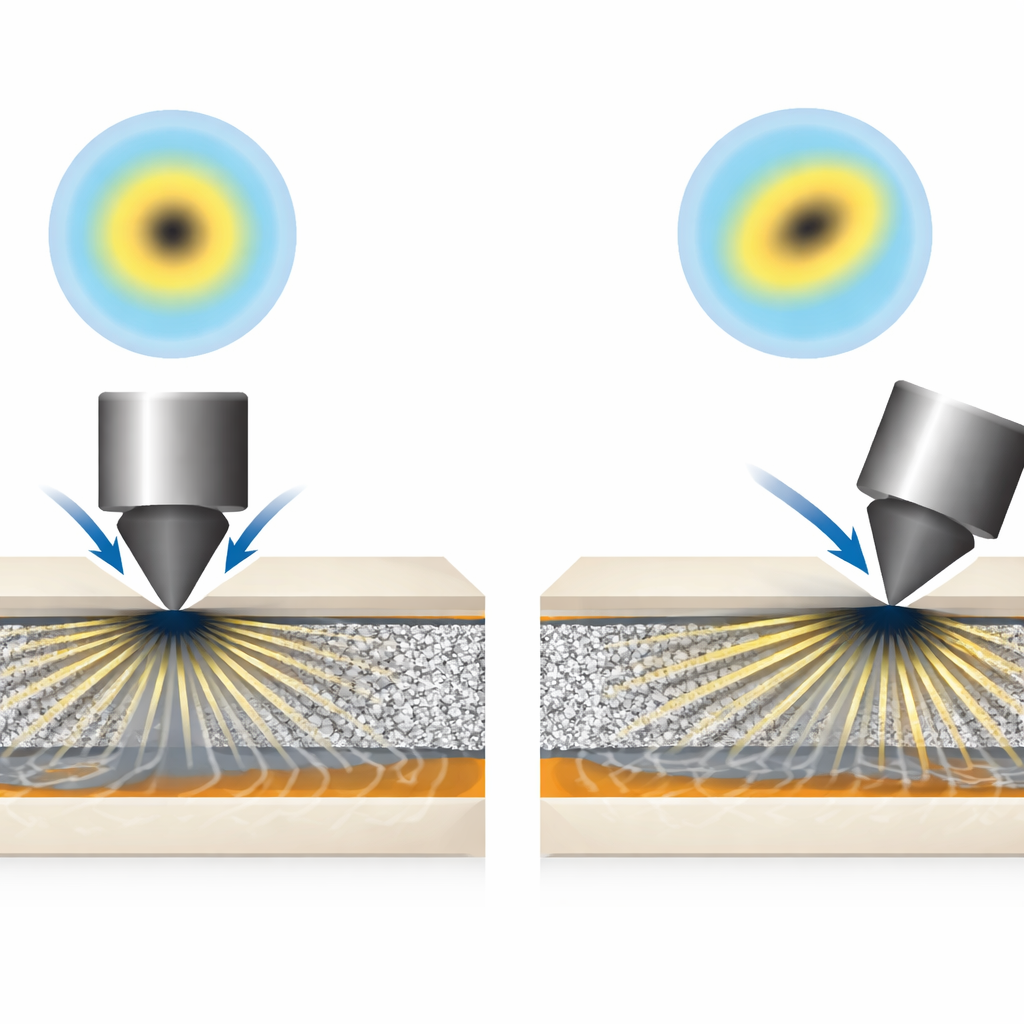
Para transformar esse detector de luz em um sentido tátil, a equipe adicionou duas camadas: uma folha flexível de LEDs ultravioleta por baixo e uma borracha de silicone esponjosa e porosa no meio. Sem pressão, os minúsculos poros na borracha espalham a luz, produzindo um brilho suave e relativamente uniforme no imager. Quando algo pressiona a superfície, os poros nessa região colapsam, o material fica mais transparente ali e o padrão de luz muda. Uma pressão direta cria um ponto mais focado, enquanto um empurrão deslizante ou inclinado desloca esse ponto lateralmente. Ajustando esses padrões mutantes a curvas simples em formato de sino, os pesquisadores puderam traduzir a forma e a posição da região escurecida na intensidade da força descendente e no tamanho e direção das forças laterais.
Toque Robótico que Sabe a Direção
Montado em um dedo robótico, o sensor fino conseguiu distinguir se estava pressionando uma bola, o lado plano de um cubo, uma aresta ou um canto afiado, e acompanhou o movimento enquanto o dedo deslizava sobre superfícies. O dispositivo detectou pressão normal em uma ampla faixa, com sensibilidade refinada ao toque suave, e percebeu deslocamentos laterais minúsculos de apenas frações de micrômetro por unidade de força. Também funcionou mesmo depois que partes do filme foram deliberadamente perfuradas, graças ao seu método de medição baseado na borda. Um modelo de visão computacional treinado nos padrões reconstruídos reconheceu diferentes situações de contato com cerca de 96,5% de precisão, mostrando que os dados ricos em formato de imagem podem ser facilmente interpretados por ferramentas modernas de inteligência artificial.
O Que Isso Significa para o Dia a Dia
Em termos simples, os pesquisadores criaram uma camada tátil flexível, semelhante a uma câmera, que pode ser aplicada sobre superfícies curvas sem o emaranhado habitual de fiação. Por ser fina, dobrável e relativamente barata de fabricar, ela poderia eventualmente cobrir grandes áreas de mãos robóticas, membros artificiais ou monitores de saúde no formato de roupa. Além da robótica, a mesma tecnologia pode mapear quão bem protetores solares bloqueiam raios ultravioleta diretamente sobre a pele, verificar pressão de superfície em dispositivos médicos ou adicionar percepção tátil a objetos do cotidiano. Embora sejam necessários mais avanços para acelerar o sistema e detectar muitos pontos de contato simultaneamente, este estudo aponta para um futuro em que máquinas podem “sentir” o mundo com uma fidelidade muito mais próxima ao nosso sentido do toque.
Citação: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Palavras-chave: sensoriamento tátil robótico, pele eletrônica flexível, tomografia de impedância, detecção de força em 3 eixos, imager de pontos quânticos