Clear Sky Science · fr
Imagerie ultraflexible basée sur la tomographie d’impédance photoélectrique pour la détection tactile robotique 3 axes
Des robots qui savent vraiment ressentir
Le toucher reste l’un des sens humains que les robots peinent encore à reproduire. Cette étude présente une « peau » électronique d’une épaisseur de papier qui permet aux robots de sentir non seulement la force de la pression, mais aussi la direction d’où elle provient. Parce qu’elle est souple, pliable et tolérante aux dommages, ce nouveau capteur pourrait un jour couvrir des mains robotiques, des dispositifs médicaux ou des objets portables, leur conférant un sens du toucher beaucoup plus naturel.
Une nouvelle façon de voir le toucher
La plupart des capteurs tactiles existants pour robots fonctionnent comme des claviers fortement câblés : chaque point de mesure nécessite sa propre connexion. Ce type d’architecture devient complexe, fragile et coûteux lorsqu’on l’étend à de grandes surfaces, et une seule ligne rompue peut mettre hors service toute une rangée ou colonne. L’équipe à l’origine de ce travail a adopté une approche très différente. Plutôt que d’utiliser une grille de pixels individuels, ils ont construit un film rond et ultrafin comportant seulement 16 contacts métalliques disposés sur le pourtour. La lumière traversant le capteur modifie la façon dont l’électricité circule à l’intérieur, et un ordinateur reconstruit une image de ce qui se passe au centre — de la même manière que des examens médicaux infèrent ce qui se trouve à l’intérieur du corps à partir de mesures en surface. Cette méthode, appelée tomographie d’impédance photoélectrique, permet aux chercheurs de « voir » un motif détaillé de zones claires et sombres avec beaucoup moins de fils.
Un film aussi fin qu’un film plastique
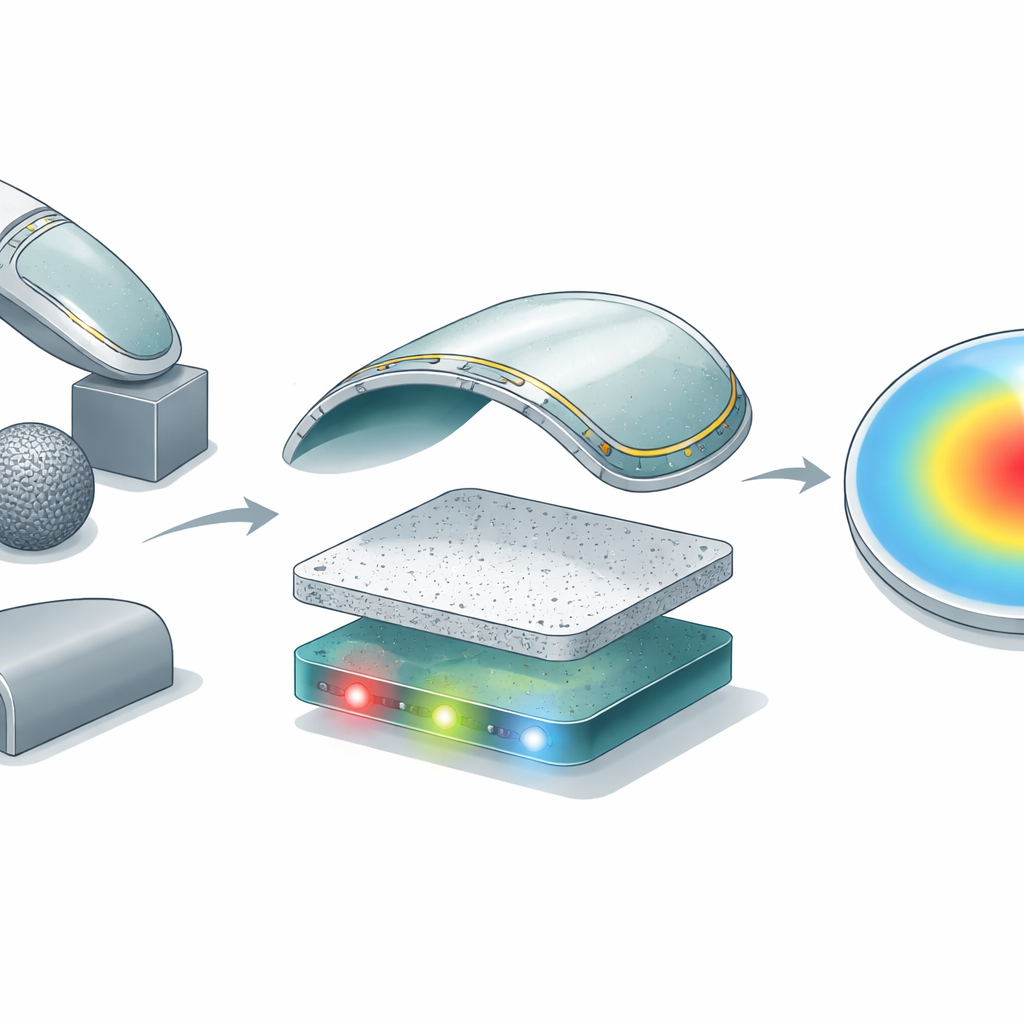
Le nouvel imager ne mesure qu’environ cinq micromètres d’épaisseur — bien plus fin qu’un cheveu humain — et combine plusieurs couches soigneusement ajustées. Les chercheurs ont formé une base plastique ultraflexible, ajouté un film d’oxyde métallique photosensible, puis l’ont enrobé de points quantiques, de minuscules cristaux semi-conducteurs très réactifs aux ultraviolets et à la lumière visible. Autour du pourtour, ils ont placé de petites électrodes en aluminium. Lorsque le film est éclairé par en-dessous, les zones recevant davantage de lumière conduisent l’électricité différemment des régions ombragées. En envoyant des courants entre des paires d’électrodes de bord et en mesurant les tensions résultantes, le système reconstruit une carte bidimensionnelle de l’intensité lumineuse au centre. Les tests ont montré que l’appareil réagit fortement à la lumière, reste stable pendant des heures d’usage et peut distinguer des détails séparés de seulement 1,5 millimètre — même lorsqu’il est enroulé autour d’objets courbes comme des stylos ou plié autour d’une tige d’un diamètre comparable à une aiguille.
Voir par la pression, pas seulement par la lumière
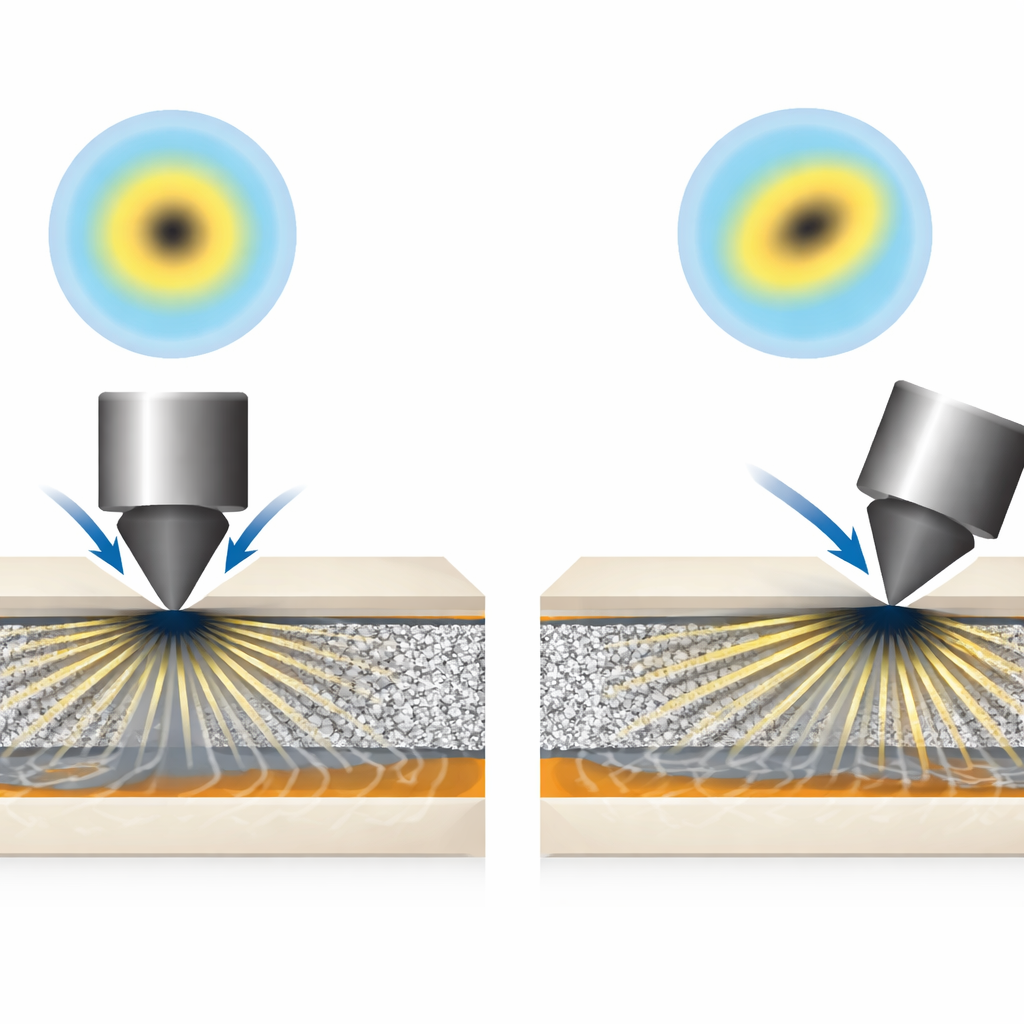
Pour transformer cet imager optique en sens du toucher, l’équipe a ajouté deux couches supplémentaires : une feuille flexible de diodes électroluminescentes ultraviolettes en dessous et un caoutchouc de silicone poreux et spongieux entre les deux. En l’absence de pression, les minuscules pores du caoutchouc diffusent la lumière, produisant une lueur douce et relativement uniforme au niveau de l’imager. Lorsqu’un objet appuie sur la surface, les pores de la région comprimée s’effondrent, le matériau devient plus transparent à cet endroit et le motif lumineux change. Une pression perpendiculaire crée une tache plus concentrée, tandis qu’une poussée oblique ou un glissement déplace cette tache latéralement. En ajustant ces motifs changeants à de simples courbes en cloche, les chercheurs ont pu traduire la forme et la position de la région sombre en l’intensité de la force vers le bas ainsi qu’en l’amplitude et la direction des forces latérales.
Un toucher robotique qui connaît la direction
Monté sur un doigt robotique, le capteur fin pouvait distinguer s’il pressait sur une balle, la face plane d’un cube, un bord ou un coin aigu, et il suivait le mouvement lorsque le doigt glissait sur des surfaces. L’appareil détectait la pression normale sur une large plage, avec une grande sensibilité aux contacts légers, et repérait de minuscules déplacements latéraux de l’ordre de fractions de micromètre par unité de force. Il fonctionnait également même après que des parties du film eurent été volontairement perforées, grâce à sa méthode de mesure basée sur le pourtour. Un modèle de vision par ordinateur entraîné sur les motifs reconstruits a reconnu différentes situations de contact avec environ 96,5 % de précision, montrant que ces données riches et visuelles peuvent être facilement interprétées par des outils d’intelligence artificielle modernes.
Ce que cela signifie pour la vie quotidienne
Concrètement, les chercheurs ont créé une couche tactile flexible et comparable à une caméra, pouvant être déployée sur des surfaces courbes sans l’enchevêtrement habituel de câbles. Parce qu’elle est fine, pliable et relativement peu coûteuse à fabriquer, elle pourrait à terme recouvrir de larges surfaces de mains robotiques, de prothèses ou de moniteurs de santé portables semblables à des vêtements. Au-delà de la robotique, cette même technologie peut cartographier directement sur la peau l’efficacité des écrans solaires contre les ultraviolets, contrôler la pression de surface dans des dispositifs médicaux ou ajouter une sensibilité au toucher à des objets du quotidien. Bien que des travaux supplémentaires soient nécessaires pour accélérer le système et détecter simultanément de nombreux points de contact, cette étude ouvre la voie à un futur où les machines pourront « sentir » le monde avec une fidélité bien plus proche de notre propre sens du toucher.
Citation: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Mots-clés: détection tactile robotique, peau électronique flexible, tomographie d’impédance, détection de force 3 axes, imagerie par boîtes quantiques