Clear Sky Science · sv
Ultraflexibel fotoelektrisk impedanstomografi-baserad avbildare för 3-axlig robottaktil sensation
Robotar som verkligen kan känna
Beröring är en av de mänskliga sinnen som robotar fortfarande har svårt att efterlikna. Denna studie presenterar en pappertunn elektronisk "hud" som gör det möjligt för robotar att inte bara känna hur hårt de trycker, utan också från vilken riktning kraften kommer. Eftersom den är mjuk, böjlig och till och med tålig mot skador, skulle denna nya sensor en dag kunna täcka robot‑händer, medicintekniska instrument eller bärbara prylar och ge dem ett betydligt mer naturligt känselsinne.
Ett nytt sätt att se beröring
De flesta befintliga beröringssensorer för robotar fungerar som tätt trådade tangentbord: varje liten mätpunkt behöver sin egen förbindelse. Den konstruktionen blir komplicerad, skör och kostsam när den skalas upp till stora ytor, och en enda avbruten ledning kan slå ut en hel rad eller kolumn. Teamet bakom detta arbete valde en mycket annorlunda strategi. I stället för ett rutnät av individuella pixlar byggde de en rund, ultratunn film med bara 16 metallkontakter placerade runt kanten. Ljus som faller genom sensorn ändrar hur elektriciteten flyter inuti, och en dator rekonstruerar en bild av vad som händer i mitten—likt hur medicinska avbildningar härleder vad som finns inuti kroppen från mätningar vid ytan. Denna metod, kallad fotoelektrisk impedanstomografi, låter forskarna "se" ett detaljerat mönster av ljus och mörker med avsevärt färre ledningar.
En film lika tunn som plastfolie
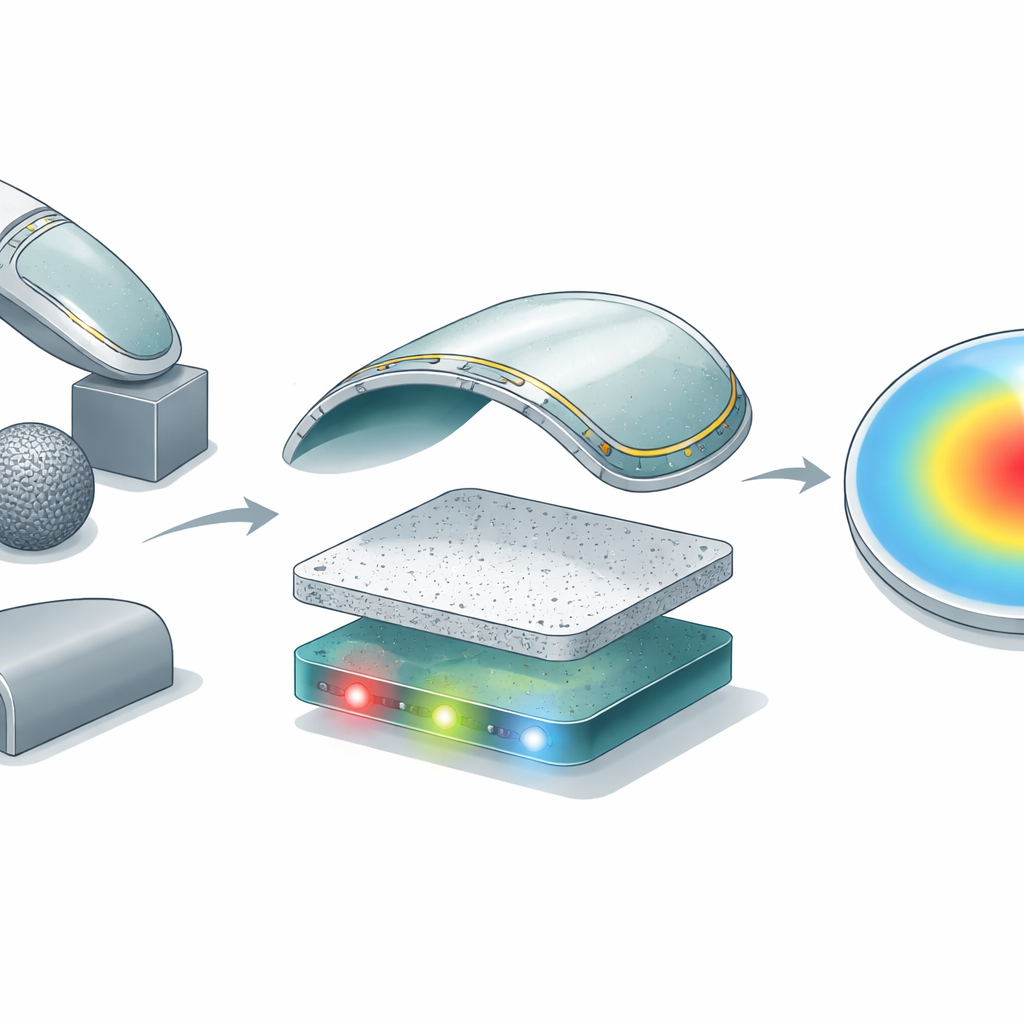
Den nya avbildaren är endast omkring fem mikrometer tjock—många gånger tunnare än ett mänskligt hår—men kombinerar flera noggrant avstämda lager. Forskarna formade en ultraflexibel plastbas, lade till en ljuskänslig metalloxidfilm och täckte den sedan med kvantdots, små halvledarkristaller som reagerar starkt på ultraviolett och synligt ljus. Runt ytterkanten placerade de små aluminiumelektroder. När filmen belyses nertill leder områden som får mer ljus elektricitet annorlunda än skuggade regioner. Genom att skicka strömmar mellan par av kant‑elektroder och mäta de resulterande spänningarna rekonstruerar systemet en tvådimensionell karta över ljusintensiteten i mitten. Tester visade att enheten reagerar kraftigt på ljus, förblir stabil under timmar av användning och kan urskilja detaljer så nära som 1,5 millimeter—även när den är lindad runt kurvade objekt som pennor eller böjd över en nåltunn stång.
Se genom tryck, inte bara ljus
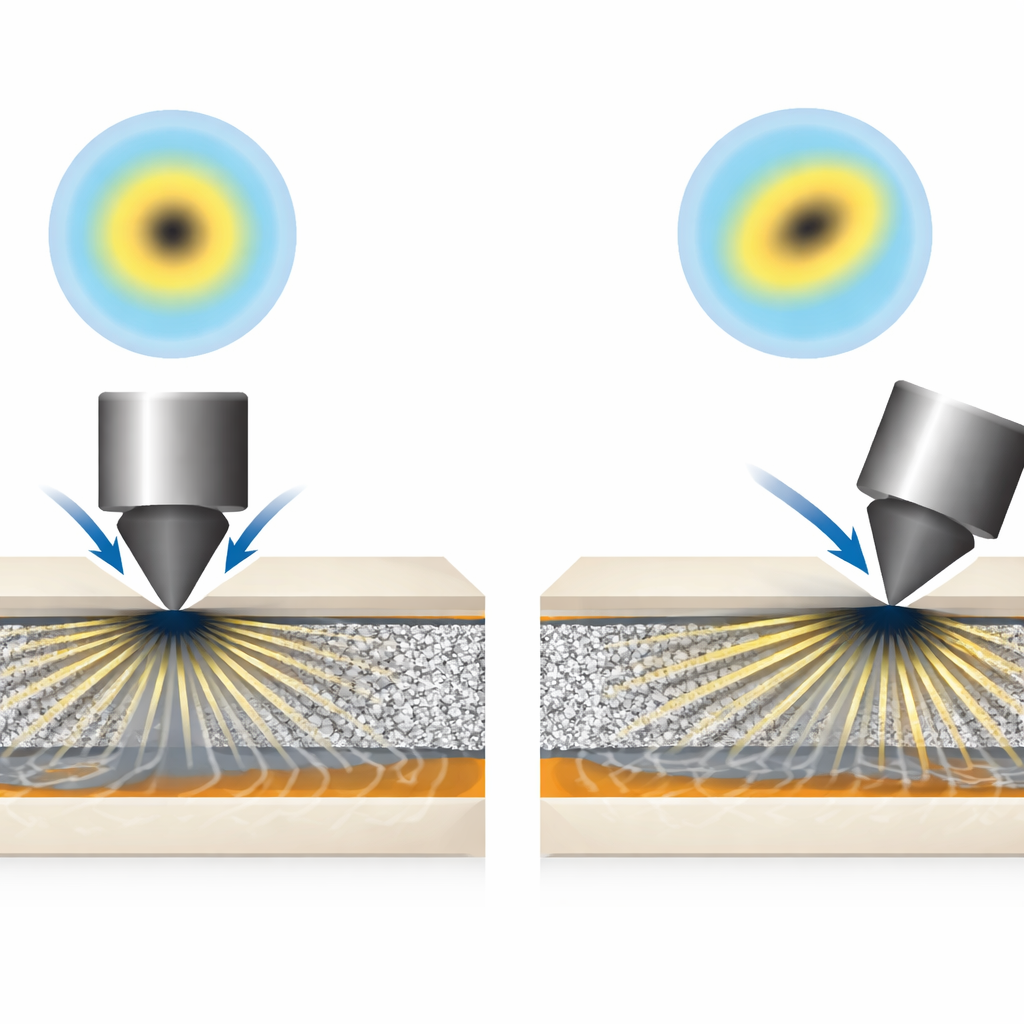
För att förvandla denna ljusavbildare till ett känselsinne lade teamet till två lager: ett flexibelt ark med ultravioletta lysdioder under och ett svampigt, poröst silikongummi däremellan. Utan tryck sprider de små porerna i gummit ljuset och ger ett mjukt, relativt jämnt sken vid avbildaren. När något trycker på ytan kollapsar porerna i det området, materialet blir mer transparent där och ljusmönstret förändras. Ett rakt tryck skapar en mer fokuserad fläck, medan ett glidande eller vinklat tryck förskjuter den fläcken åt sidan. Genom att passa dessa förändrade mönster till enkla klockformade kurvor kunde forskarna översätta formen och positionen av det mörka området till styrkan i den nedåtriktade kraften samt storlek och riktning för sidokrafter.
Robotisk beröring som känner riktning
Monterad på ett robotfinger kunde den tunna sensorn avgöra om den tryckte mot en boll, den platta sidan av en kub, en kant eller ett vasst hörn, och den följde rörelse när fingret gled över ytor. Enheten uppfattade normala tryck över ett brett omfång, med fin känslighet för lätta beröringar, och registrerade små sidoförskjutningar på bara bråkdelar av en mikrometer per kraftenhet. Den fungerade även efter att delar av filmen avsiktligt punkterats, tack vare dess kantbaserade mätmetod. En datorvisionsmodell tränad på de rekonstruerade mönstren kände igen olika kontaktsituationer med cirka 96,5 procents noggrannhet, vilket visar att den rika, bildlika datan lätt kan förstås av moderna artificiella intelligensverktyg.
Vad detta betyder i vardagen
Förenklat har forskarna skapat ett flexibelt, kameraliknande känsellager som kan spridas över kurvade ytor utan vanliga kabeltrassel. Eftersom det är tunt, böjbart och relativt billigt att tillverka, skulle det så småningom kunna täcka stora ytor på robot‑händer, konstgjorda lemmar eller klädliknande hälsomonitorer. Utöver robotik kan samma teknik kartlägga hur väl solskyddsmedel blockerar ultraviolett ljus direkt på huden, kontrollera yttryck i medicintekniska apparater eller lägga till känselmedvetenhet i vardagsföremål. Även om mer arbete krävs för att snabba upp systemet och att mäta många kontaktytor samtidigt, pekar denna studie mot en framtid där maskiner kan "känna" världen med en precision som ligger mycket närmare vårt eget känselsinne.
Citering: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Nyckelord: robotisk taktil sensation, flexibelt elektroniskt 'hud', impedanstomografi, 3-axlig kraftmätning, kvantdots‑avbildare