Clear Sky Science · ar
جهاز تصوير قائم على التصوير الطرقي للكهرباء الضوئية فائق الليونة للاستشعار اللمسي الروبوتي ثلاثي المحاور
روبوتات تستطيع الإحساس حقًا
اللمس واحد من الحواس البشرية التي لا تزال الروبوتات تجد صعوبة في تقليدها. تقدم هذه الدراسة "جلدًا" إلكترونيًا نحيفًا كالورق يمكّن الروبوتات من الإحساس ليس فقط بشدة الضغط، بل أيضًا من أي اتجاه تأتي القوة. وبفضل طبيعته الناعمة والقابلة للثني والمتحملة للتلف، قد يغطي هذا المستشعر يومًا ما أيدي الروبوتات أو الأجهزة الطبية أو الأدوات القابلة للارتداء، مانحًا إياها إحساسًا باللمس أقرب إلى الطبيعي.
طريقة جديدة "لرؤية" اللمس
تعمل معظم حساسات اللمس الحالية للروبوتات كلوحات مفاتيح متشابكة الأسلاك: كل نقطة استشعار صغيرة تحتاج إلى توصيل خاص بها. يصبح هذا التصميم معقدًا وهشًا ومكلفًا عند توسيعه لمساحات كبيرة، وسطر واحد مكسور قد يعطل صفًا أو عمودًا بأكمله. اتخذ الفريق وراء هذا العمل نهجًا مختلفًا تمامًا. بدلًا من شبكة من البكسلات الفردية، بنوا غشاءً دائريًا فائق النحافة يحتوي على 16 موصلًا معدنيًا فقط موزعة حول الحافة. يغيّر الضوء المار عبر المستشعر طريقة تدفق الكهرباء داخله، ويعيد الحاسوب بناء صورة لما يحدث في الوسط — على غرار كيفية استنتاج الأشعة الطبية لما في داخل الجسم من قياسات على السطح. تتيح هذه الطريقة، المسماة تصوير الممانعة الكهروضوئية، للباحثين "رؤية" نمط تفصيلي من الضوء والظل باستخدام أسلاك أقل بكثير.
غشاء رقيق كاللفافة البلاستيكية
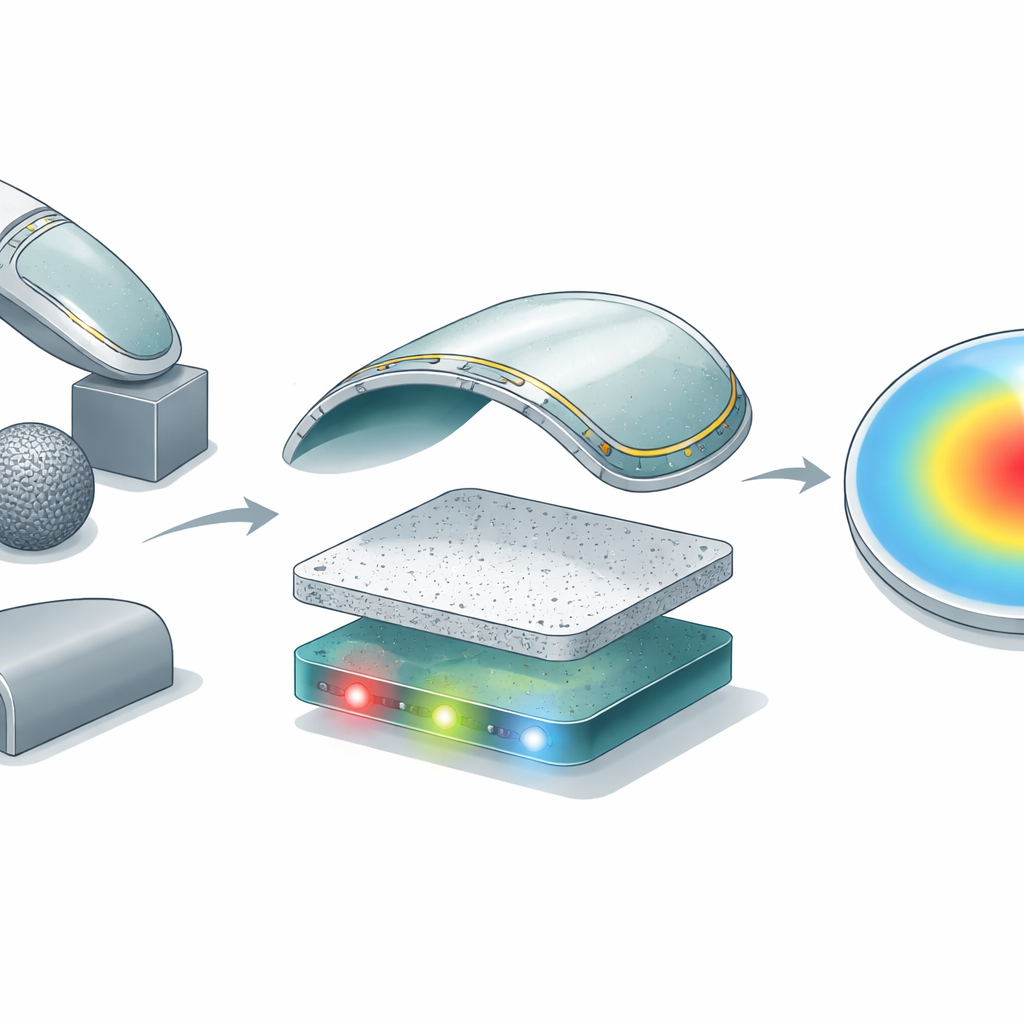
الجهاز الجديد سُمكه حوالي خمسة ميكرومترات فقط — أرق بكثير من شعرة الإنسان — ومع ذلك يجمع بين عدة طبقات مضبوطة بعناية. شكّل الباحثون قاعدة بلاستيكية فائقة الليونة، أضافوا طبقة أكسيد معدني حسّاسة للضوء، ثم غطّوها بنقاط كمومية، وهي بلورات شبه موصلية صغيرة تستجيب بقوة للأشعة فوق البنفسجية والضوء المرئي. وضعوا حول الحافة أقطاب ألومنيوم صغيرة. عندما يُضاء الغشاء من الأسفل، تقود المناطق التي تستقبل ضوءًا أكثر الكهرباء بصورة مختلفة عن المناطق المظللة. من خلال إرسال تيارات بين أزواج من أقطاب الحافة وقياس الفولتية الناتجة، يعيد النظام بناء خريطة ثنائية الأبعاد لشدة الضوء في المركز. أظهرت الاختبارات أن الجهاز يستجيب بقوة للضوء، ويظل مستقرًا لساعات من الاستخدام، ويمكنه تمييز ميزات على مسافات تصل إلى 1.5 مليمتر حتى عند لفه حول أجسام منحنية مثل الأقلام أو ثنيه حول قضيب رفيع كالإبرة.
الرؤية عبر الضغط، ليس الضوء فقط
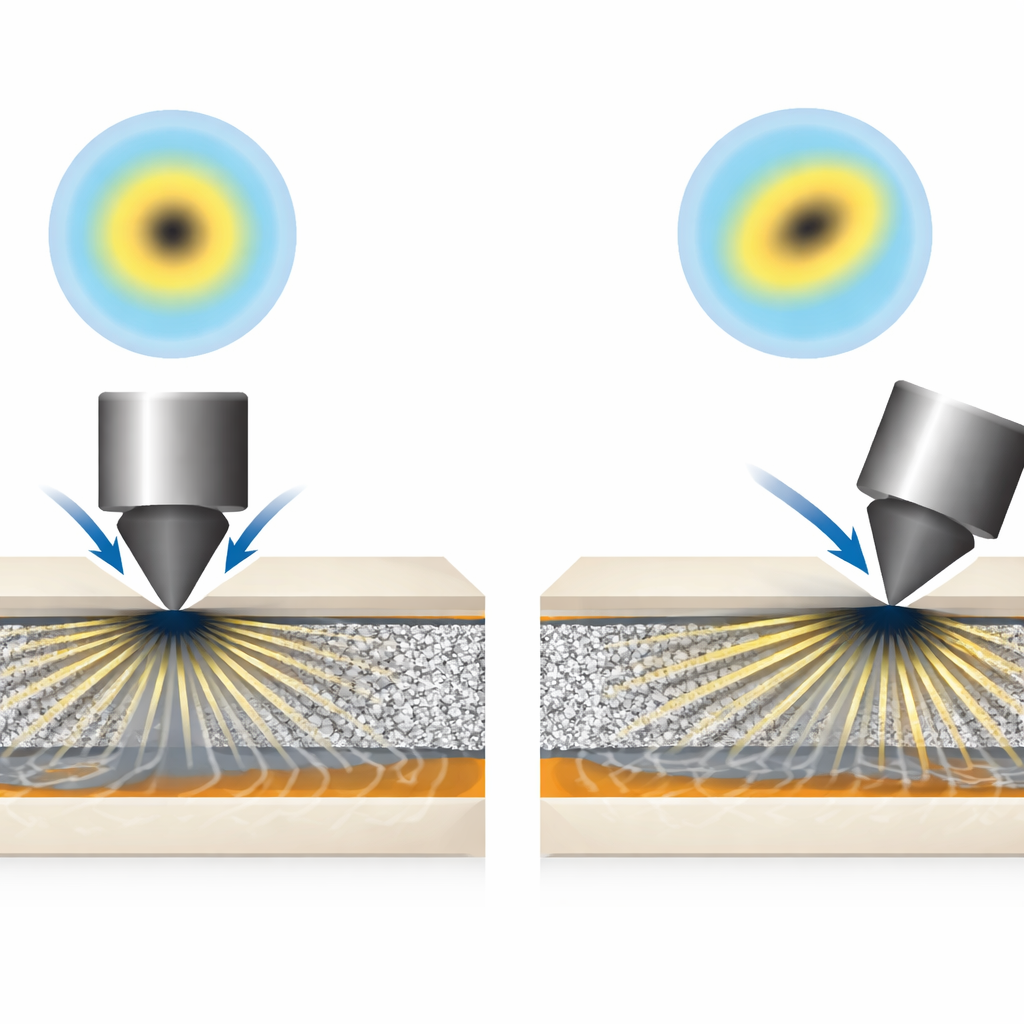
لتحويل جهاز تصوير الضوء هذا إلى حاسة للمس، أضاف الفريق طبقتين إضافيتين: ورقة مرنة من مصابيح ثنائية باعثة للأشعة فوق البنفسجية تحتها وطبقة إسفنجية من مطاط السيليكون المسامي بينها. بدون ضغط، تشتت المسام الصغيرة في المطاط الضوء، مكونة توهجًا ناعمًا وموزعًا إلى حد ما على الجهاز. عندما يضغط شيء ما على السطح، تنهار المسام في تلك المنطقة، ويصبح المِادة أكثر شفافية هناك، ويتغير نمط الضوء. يخلق الدفع المباشر بقعة أكثر تركيزًا، بينما يحوّل الدفع الانزلاقي أو المائل تلك البقعة جانبًا. من خلال ملاءمة هذه الأنماط المتغيرة إلى منحنيات جرسية بسيطة، تمكن الباحثون من تحويل شكل وموقع المنطقة المظلمة إلى قياس لقوة الدفع العمودية وحجم واتجاه القوى الجانبية.
لمس روبوتي يعرف الاتجاه
مثبتًا على إصبع روبوتي، استطاع المستشعر الرقيق التمييز ما إذا كان يضغط على كرة، أو على السطح المسطح لمكعب، أو على حافة، أو على زاوية حادة، وتتبع الحركة أثناء انزلاق الإصبع على الأسطح. شعر الجهاز بالضغط العمودي عبر نطاق واسع، مع حساسية دقيقة للمس الخفيف، وكشف تحولات جانبية صغيرة لا تتجاوز أجزاءًا من ميكرومتر لكل وحدة قوة. كما عمل حتى بعد ثقب أجزاء من الغشاء عمدًا، بفضل طريقة القياس المعتمدة على الحافة. تعرف نموذج رؤية حاسوبية مدرّب على الأنماط المعاد بناؤها على حالات تلامس مختلفة بدقة تقارب 96.5 بالمئة، مما يبيّن أن البيانات الغنية الشبيهة بالصور يمكن أن تُفهم بسهولة بواسطة أدوات الذكاء الاصطناعي الحديثة.
ماذا يعني هذا في الحياة اليومية
بعبارات بسيطة، أنشأ الباحثون طبقة لمسية مرنة شبيهة بالكاميرا يمكن نشرها على أسطح منحنية دون تشابك الأسلاك المعتاد. وبما أنها رقيقة وقابلة للثني ومنخفضة التكلفة نسبيًا في التصنيع، فقد تغطي مستقبلًا مساحات واسعة من أيدي الروبوتات أو الأطراف الصناعية أو أجهزة مراقبة الصحة القابلة للارتداء. وبخلاف الروبوتات، يمكن للتقنية نفسها قياس مدى فعالية واقيات الشمس في حجب الأشعة فوق البنفسجية مباشرة على الجلد، فحص ضغط السطح في الأجهزة الطبية، أو إضافة وعي لمسي للأشياء اليومية. ومع حاجة العمل المستمر لتسريع النظام واستشعار نقاط تلامس متعددة في آن واحد، تشير هذه الدراسة إلى مستقبل يمكن للآلات فيه "الشعور" بالعالم بدقة أقرب كثيرًا إلى إحساسنا باللمس.
الاستشهاد: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
الكلمات المفتاحية: الاستشعار اللمسي الروبوتي, جلد إلكتروني مرن, تصوير الممانعة, استشعار قوة ثلاثية المحاور, جهاز تصوير نقاط كمومية