Clear Sky Science · nl
Ultraflexibele foto-elektrische impedantietomografie-beeldvormer voor 3-assige robotische tastzin
Robots die echt kunnen voelen
Haptiek is een van de menselijke zintuigen die robots nog steeds moeilijk kunnen nabootsen. Deze studie introduceert een papierdunne elektronische “huid” waarmee robots niet alleen kunnen voelen hoe hard ze drukken, maar ook uit welke richting de kracht komt. Omdat het zacht, buigzaam en zelfs bestand tegen schade is, zou deze nieuwe sensor op een dag robotarmen, medische instrumenten of draagbare apparaten kunnen bedekken en hen een veel natuurlijker gevoel voor aanraking geven.
Een nieuwe manier om aanraking te zien
De meeste huidige aanraking sensors voor robots werken als strak bedrade toetsenborden: elk klein meetpunt heeft een eigen aansluiting nodig. Dat ontwerp wordt gecompliceerd, kwetsbaar en duur bij opschaling naar grote oppervlakken, en een enkele gebroken leiding kan een hele rij of kolom uitschakelen. Het team achter dit werk koos een heel andere aanpak. In plaats van een raster van individuele pixels bouwden zij een ronde, ultradunne film met slechts 16 metalen contacten rond de rand. Licht dat door de sensor schijnt verandert hoe elektriciteit erbinnen vloeit, en een computer reconstrueert een afbeelding van wat er in het midden gebeurt—vergelijkbaar met hoe medische scans afleiden wat zich binnenin het lichaam bevindt aan de hand van metingen aan het oppervlak. Deze methode, foto-elektrische impedantietomografie genoemd, stelt de onderzoekers in staat een gedetailleerd patroon van licht en donker “te zien” met veel minder draden.
Een film zo dun als huishoudfolie
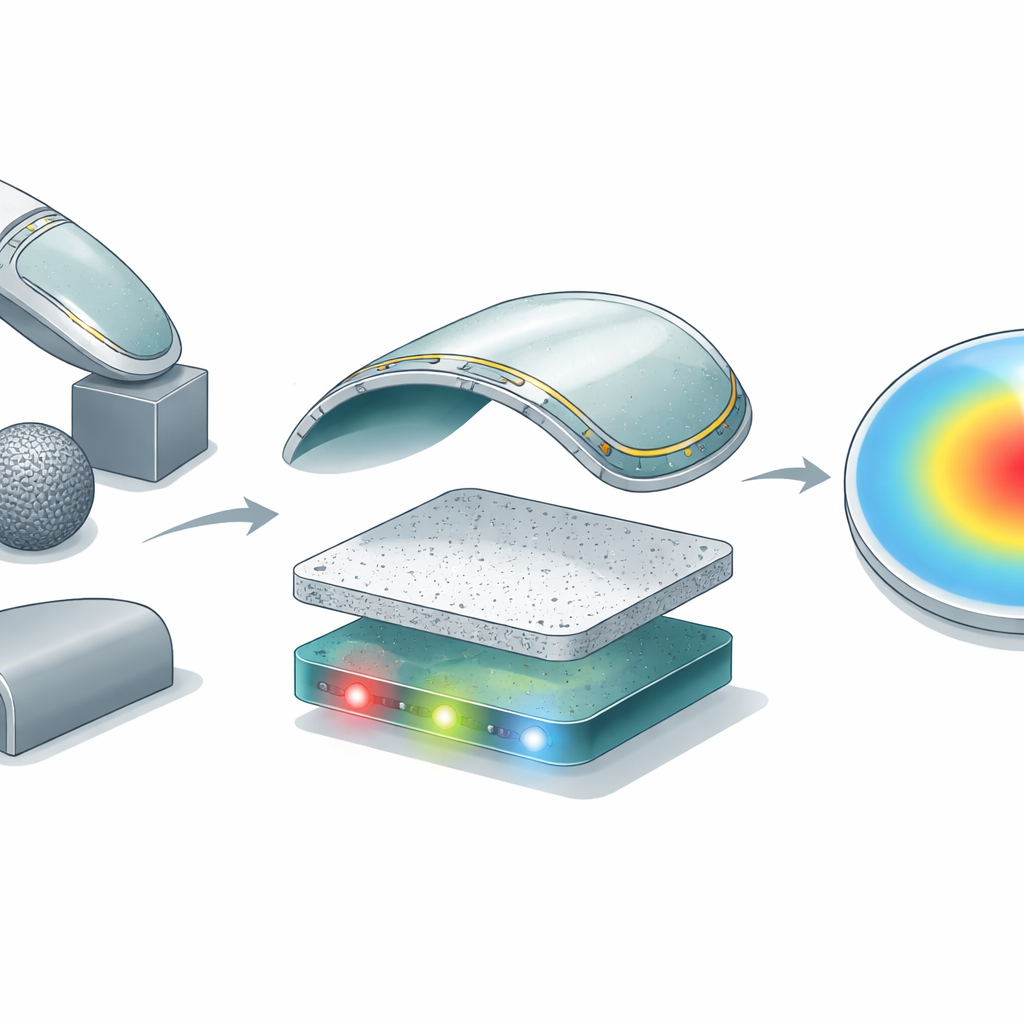
De nieuwe beeldvormer is slechts ongeveer vijf micrometer dik—veel dunner dan een mensenhaar—en combineert toch meerdere zorgvuldig afgestemde lagen. De onderzoekers vormden een ultraflexibele kunststofbasis, brachten een lichtgevoelige metaaloxidelagen aan en coaten die vervolgens met kwantumdots, kleine halfgeleiderkristallen die sterk reageren op ultraviolette en zichtbaar licht. Rond de buitenrand plaatsten ze kleine aluminium elektroden. Wanneer de film van onderen wordt verlicht, geleiden gebieden die meer licht ontvangen anders dan beschaduwde regio’s. Door stromen tussen paren randelektroden te sturen en de resulterende spanningen te meten, reconstrueert het systeem een tweedimensionale kaart van lichtintensiteit in het midden. Tests toonden aan dat het apparaat sterk op licht reageert, urenlang stabiel blijft en kenmerken kan onderscheiden die tot 1,5 millimeter van elkaar gescheiden zijn—ook wanneer het rond gebogen objecten zoals pennen wordt gewikkeld of over een naalddun staafje wordt gebogen.
Door druk zien, niet alleen licht
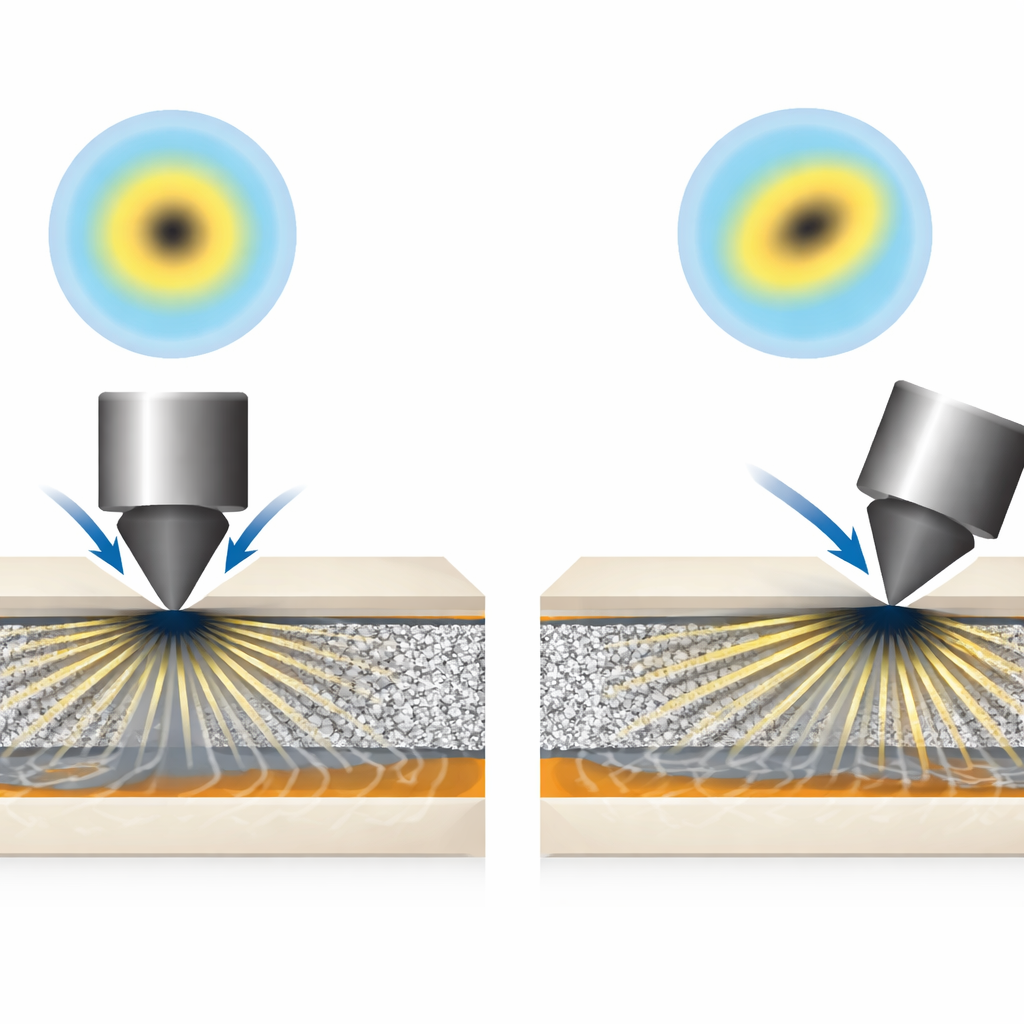
Om deze lichtbeeldvormer in een tastzin te veranderen, voegde het team twee extra lagen toe: een flexibele laag ultraviolette lichtdiodes eronder en een sponsachtige, poreuze siliconenrubber ertussen. Zonder druk verstrooien de kleine poriën in het rubber het licht, waardoor de beeldvormer een zachte, tamelijk uniforme gloed ontvangt. Wanneer iets op het oppervlak drukt, klappen de poriën in dat gebied ineen, wordt het materiaal daar transparanter en verandert het lichtpatroon. Een rechte druk creëert een meer gefocuste vlek, terwijl een schuivende of hoekige druk die vlek zijwaarts verschuift. Door deze veranderende patronen te passen op eenvoudige belvormige krommen, konden de onderzoekers de vorm en positie van het donkere gebied vertalen naar de sterkte van de neerwaartse kracht en de grootte en richting van de zijwaartse krachten.
Robotische aanraking die richting kent
Gemonteerd op een robotvinger kon de dunne sensor aangeven of hij op een bal, de vlakke zijde van een blok, een rand of een scherp hoekpunt drukte, en hij volgde bewegingen terwijl de vinger over oppervlakken schoof. Het apparaat detecteerde normale druk over een breed bereik, met fijne gevoeligheid voor zachte aanrakingen, en registreerde kleine zijwaartse verschuivingen van slechts fracties van een micrometer per eenheid kracht. Het werkte ook nog nadat delen van de film opzettelijk waren doorboord, dankzij de randgebaseerde meetmethode. Een computervisueel model, getraind op de gereconstrueerde patronen, herkende verschillende contactomstandigheden met ongeveer 96,5 procent nauwkeurigheid, wat aantoont dat de rijke, beeldachtige data gemakkelijk door moderne AI‑tools te interpreteren zijn.
Wat dit betekent voor het dagelijks leven
In eenvoudige termen hebben de onderzoekers een flexibele, camera-achtige tastlaag gemaakt die over gebogen oppervlakken kan worden aangebracht zonder de gebruikelijke wirwar van bedrading. Omdat hij dun, buigzaam en relatief goedkoop te produceren is, zou hij uiteindelijk grote delen van robothanden, kunstmatige ledematen of kledingachtige gezondheidsmonitoren kunnen bedekken. Buiten robotica kan dezelfde technologie direct op de huid in kaart brengen hoe goed zonnebrandmiddelen ultraviolette straling blokkeren, druk aan oppervlaktes in medische apparaten controleren of alledaagse voorwerpen voorzien van tastbewustzijn. Hoewel er nog werk nodig is om het systeem te versnellen en om veel contactpunten tegelijk te detecteren, wijst deze studie op een toekomst waarin machines de wereld kunnen “voelen” met een veel grotere nauwkeurigheid, dichter bij ons eigen tastgevoel.
Bronvermelding: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Trefwoorden: robotische tastzin, flexibele elektronische huid, impedantietomografie, 3-assige krachtmeting, kwantumdot-beeldvormer