Clear Sky Science · tr
3 eksenli robotik dokunsal algılama için ultr esnek fotoelektrik empedans tomografisi tabanlı görüntüleyici
Gerçekten Hisseden Robotlar
Dokunma, robotların hâlâ kopyalamakta zorlandığı insan duyularından biridir. Bu çalışma, robotların yalnızca ne kadar sert bastığını değil, aynı zamanda kuvvetin hangi yönden geldiğini de hissetmelerini sağlayan kağıt inceliğinde bir elektronik “deri” tanıtıyor. Yumuşak, bükülebilir ve hatta hasara karşı toleranslı olduğu için bu yeni sensör bir gün robot ellerini, tıbbi cihazları veya giyilebilir aygıtları kaplayarak onlara çok daha doğal bir dokunma hissi kazandırabilir.
Dokunmayı Görmenin Yeni Bir Yolu
Mevcut dokunma sensörlerinin çoğu sıkı kablolanmış klavyeler gibi çalışır: her küçük algılama noktasının kendi bağlantısı gerekir. Bu tasarım, geniş alanlara ölçeklendiğinde karmaşık, kırılgan ve maliyetli hale gelir ve tek bir kopan hat bir bütün satırı ya da sütunu devre dışı bırakabilir. Bu çalışmanın ekibi çok farklı bir yaklaşım benimsedi. Ayrı piksellerden oluşan bir ızgara yerine, çevresine sadece 16 metal kontak yerleştirilmiş yuvarlak, ultra ince bir film inşa ettiler. Sensörün içinden geçen ışık, içindeki elektrik akışını değiştirir ve bir bilgisayar ortadaki durumda ne olduğunu yeniden oluşturur—tıpkı tıbbi taramaların yüzeydeki ölçümlere dayanarak vücudun içini çıkarması gibi. Fotoelektrik empedans tomografisi olarak adlandırılan bu yöntem, araştırmacıların çok daha az tel kullanarak ışık ve karanlığın ayrıntılı bir desenini “görmelerine” izin veriyor.
Streç Film Inceliğinde Bir Film
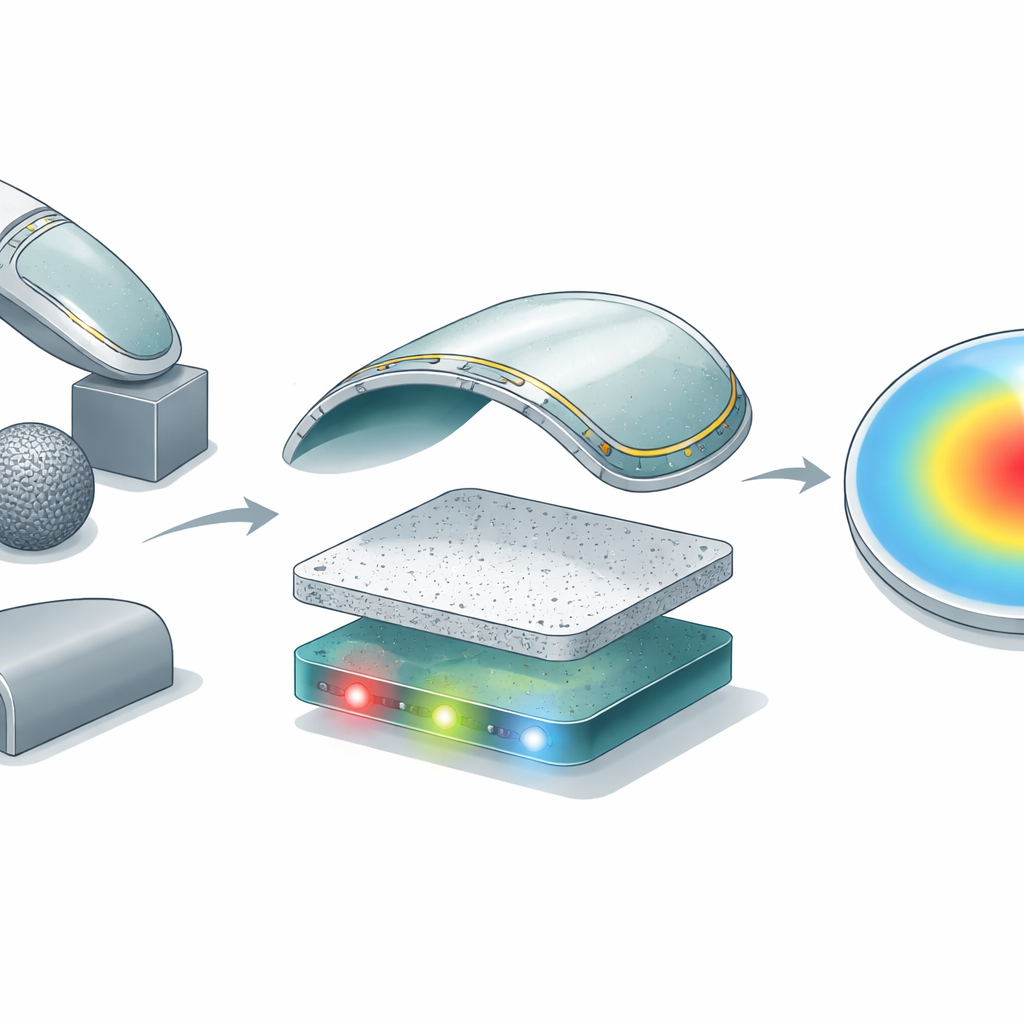
Yeni görüntüleyici yalnızca yaklaşık beş mikrometre kalınlığında—insan saçından kat kat daha ince—ancak birkaç dikkatle ayarlanmış katmanı birleştiriyor. Araştırmacılar ultra esnek bir plastik taban oluşturdular, ışığa duyarlı bir metal-oksit film eklediler ve ardından ultraviyole ve görünür ışığa güçlü yanıt veren küçük yarı iletken kristaller olan kuantum noktalarıyla kapladılar. Dış kenara küçük alüminyum elektrotlar yerleştirdiler. Film altından aydınlatıldığında, daha fazla ışık alan alanlar gölgeli bölgelere göre elektriği farklı iletir. Kenar elektrot çiftleri arasında akımlar gönderilip ortaya çıkan voltajlar ölçülerek sistem merkezdeki ışık yoğunluğunun iki boyutlu bir haritasını yeniden oluşturur. Testler cihazın ışığa güçlü yanıt verdiğini, saatlerce kullanımda kararlı kaldığını ve kalem gibi eğimli nesnelere sarıldığında veya iğne inceliğinde bir çubuğun üzerine büküldüğünde bile 1,5 milimetre kadar yakın özellikleri ayırt edebildiğini gösterdi.
Sadece Işıktan Değil, Basınçtan da Görmek
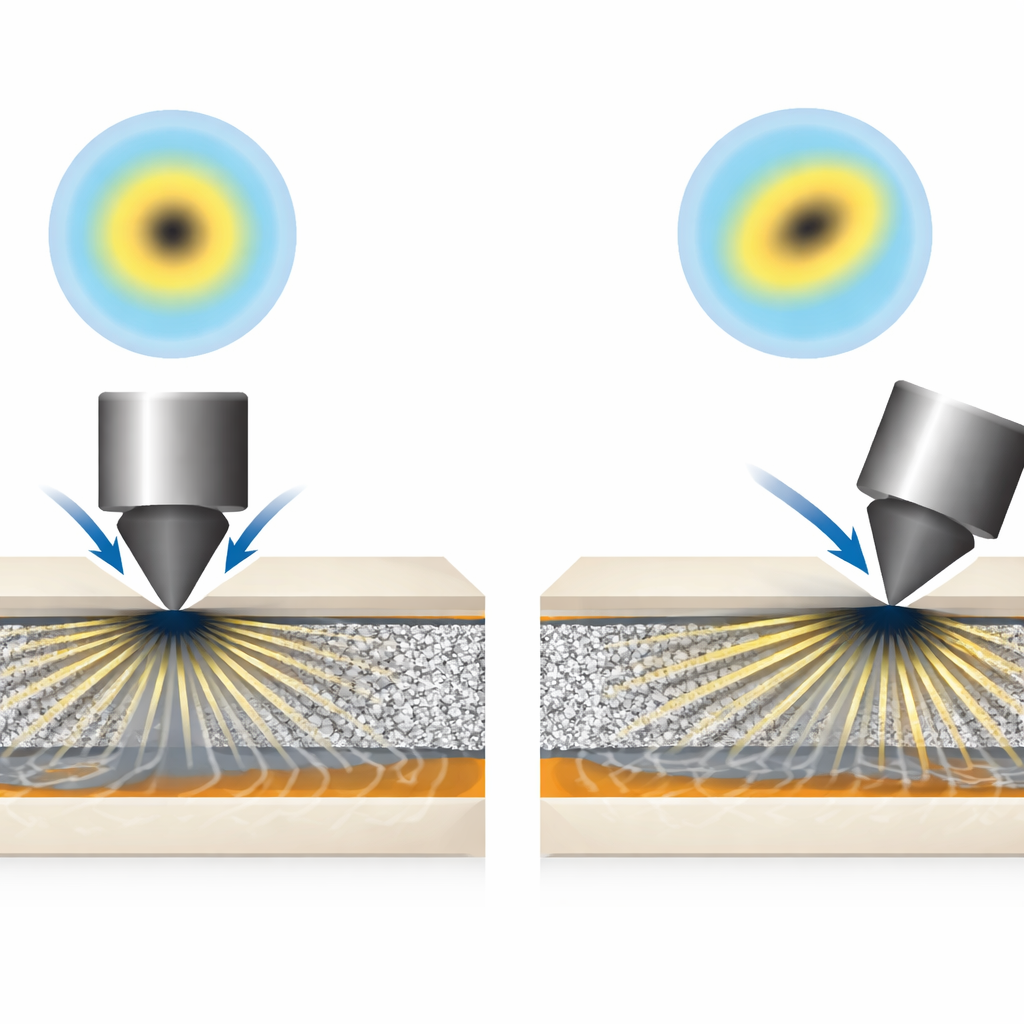
Bu ışık görüntüleyiciyi dokunma duyusuna dönüştürmek için ekip iki katman daha ekledi: altında esnek bir ultraviyole ışık yayan diyot tabakası ve arada süngerimsi, gözenekli bir silikon kauçuk. Basınç olmadığında kauçuktaki küçük gözenekler ışığı saçıp görüntüleyicide yumuşak, nispeten homojen bir parlama oluşturur. Bir şey yüzeye bastırdığında, o bölgedeki gözenekler çöker, malzeme orada daha saydam hale gelir ve ışık deseni değişir. Düz bir itme daha odaklanmış bir nokta oluştururken, kaydırma veya açılı itme o noktayı yana doğru kaydırır. Bu değişen desenleri basit çan biçimli eğrilere uydurarak araştırmacılar karanlık bölgenin şekli ve konumunu aşağı doğru kuvvetin şiddeti ile yanal kuvvetlerin büyüklüğü ve yönüne çevirebildiler.
Yönünü Bilen Robotik Dokunuş
Robot parmağına monte edildiğinde ince sensör bir topa, bir küpün düz yüzüne, bir kenara veya keskin bir köşeye bastığını ayırt edebildi ve parmak yüzeyler boyunca kayarken hareketi izledi. Cihaz geniş bir aralıkta normal basıncı algıladı, nazik dokunuşlara karşı hassasiyeti iyiydi ve birim kuvvet başına yalnızca mikrometrenin kesirleri kadar küçük yanal kaymaları tespit etti. Ayrıca, filmin bazı parçaları kasıtlı olarak delinmiş olsa bile kenar tabanlı ölçüm yöntemi sayesinde çalışmaya devam etti. Yeniden oluşturulmuş desenler üzerinde eğitilmiş bir bilgisayar görüsü modeli farklı temas durumlarını yaklaşık %96,5 doğrulukla tanıdı; bu da zengin, görüntü benzeri verilerin modern yapay zeka araçları tarafından kolayca anlaşılabileceğini gösteriyor.
Günlük Yaşama Ne İfade Ediyor?
Basitçe söylemek gerekirse, araştırmacılar kıvrımlı yüzeylere olağan kablo karmaşası olmadan yayılabilecek esnek, kamera benzeri bir dokunma katmanı oluşturdu. İnce, bükülebilir ve nispeten düşük maliyetli üretilebilmesi nedeniyle sonunda robot ellerinin, yapay uzuvların veya giysi benzeri sağlık monitörlerinin geniş alanlarını kaplayabilir. Robotik ötesinde, aynı teknoloji güneş kremlerinin ultraviyole ışığı cilt üzerinde ne kadar engellediğini doğrudan haritalayabilir, tıbbi cihazlarda yüzey basıncını kontrol edebilir veya günlük nesnelere dokunma farkındalığı ekleyebilir. Sistemi hızlandırmak ve aynı anda birçok temas noktasını algılamak için daha fazla çalışma gerekse de bu çalışma makinelerin dünyayı bizim dokunma duyumuza çok daha yakın bir doğrulukla “hissetebileceği” bir geleceğe işaret ediyor.
Atıf: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Anahtar kelimeler: robotik dokunsal algılama, esnek elektronik deri, empedans tomografisi, 3 eksenli kuvvet algılama, kuantum nokta görüntüleyici