Clear Sky Science · de
Ultraflexibler, auf photoelektrischer Impedanztomographie basierender Imager für 3‑achsige robotische Tastsensorik
Roboter, die wirklich fühlen können
Tastsinn ist eines der menschlichen Wahrnehmungsfähigkeiten, die Roboter noch immer nur schwer nachahmen. Diese Studie stellt eine papierdünne elektronische „Haut“ vor, die Robotern nicht nur erlaubt zu spüren, wie stark sie drücken, sondern auch aus welcher Richtung die Kraft wirkt. Weil sie weich, biegsam und sogar schadensresistent ist, könnte dieser neue Sensor eines Tages Robotergreifern, medizinischen Geräten oder tragbaren Gadgets aufgebracht werden und ihnen ein deutlich natürlicheres Tastempfinden verleihen.
Ein neuer Weg, Berührung zu sehen
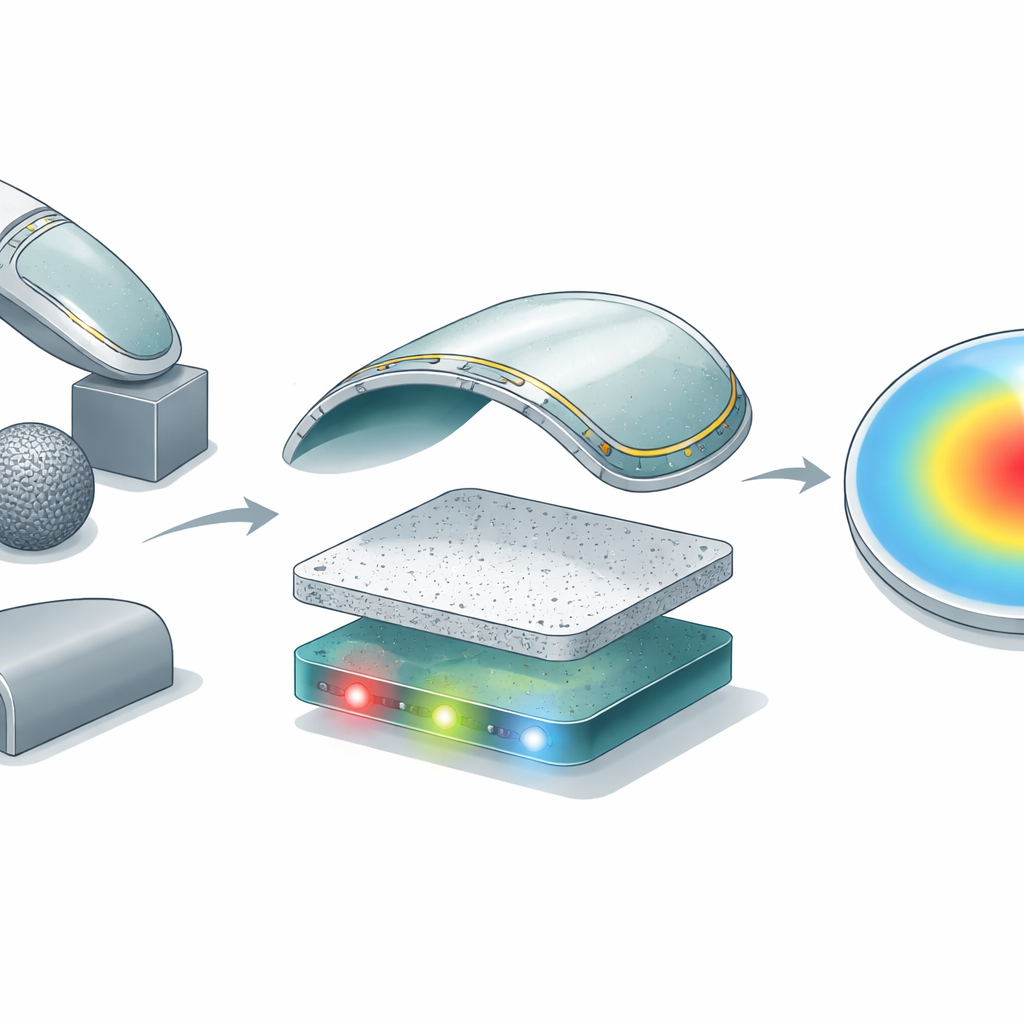
Die meisten existierenden Tastsensoren für Roboter funktionieren wie eng verkabelte Tastaturen: Jeder winzige Messpunkt benötigt eine eigene Leitung. Dieses Konzept wird bei großflächiger Anwendung kompliziert, empfindlich und teuer, und eine einzige defekte Leitung kann eine ganze Reihe oder Spalte lahmlegen. Das Team hinter dieser Arbeit verfolgte einen ganz anderen Ansatz. Statt eines Rasters aus einzelnen Pixeln bauten sie einen runden, ultradünnen Film mit nur 16 Metallkontakten am Rand. Durch den Sensor fallendes Licht verändert, wie Strom in ihm fließt, und ein Computer rekonstruiert daraus ein Bild dessen, was in der Mitte passiert – ähnlich wie medizinische Scans aus Messungen an der Oberfläche erschließen, was sich im Inneren befindet. Diese Methode, photoelektrische Impedanztomographie genannt, erlaubt den Forschern, mit deutlich weniger Leitungen ein detailliertes Helligkeitsmuster zu „sehen“.
Ein Film so dünn wie Frischhaltefolie
Der neue Imager ist nur etwa fünf Mikrometer dick – viele Male dünner als ein menschliches Haar – und kombiniert mehrere fein abgestimmte Schichten. Die Forschenden formten eine ultraflexible Kunststoffbasis, fügten eine lichtempfindliche Metalloxid‑Schicht hinzu und beschichteten diese mit Quantenpunkten, winzigen Halbleiterkristallen, die stark auf UV‑ und sichtbares Licht reagieren. Am äußeren Rand platzierten sie kleine Aluminiumelektroden. Wird der Film von unten beleuchtet, leiten stärker beleuchtete Bereiche den Strom anders als beschattete Regionen. Indem Ströme zwischen Elektrodenpaaren am Rand gesendet und die resultierenden Spannungen gemessen werden, rekonstruiert das System eine zweidimensionale Karte der Lichtintensität im Zentrum. Tests zeigten, dass das Gerät stark auf Licht reagiert, über Stunden stabil bleibt und Merkmale bis auf 1,5 Millimeter Abstand unterscheiden kann – selbst wenn es um gekrümmte Objekte wie Stifte gewickelt oder über eine nadeldünne Stange gebogen wird.
Durch Druck sehen, nicht nur durch Licht
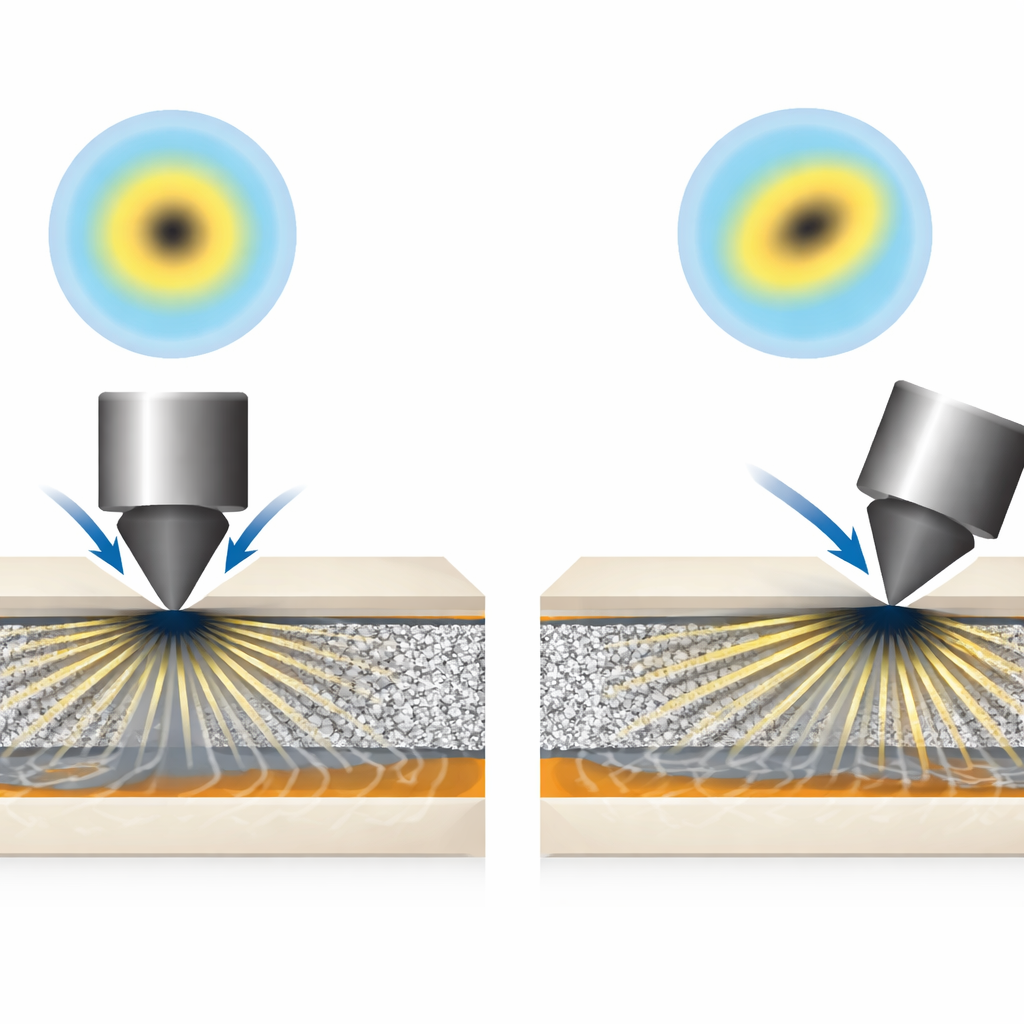
Um diesen Lichtimager in ein Tastsystem zu verwandeln, ergänzte das Team zwei weitere Schichten: ein flexibles Blatt mit UV‑Leuchtdioden darunter und einen schwammigen, porösen Silikonkautschuk dazwischen. Ohne Druck streuen die winzigen Poren im Gummi das Licht und erzeugen am Imager ein weiches, relativ gleichmäßiges Leuchten. Sobald etwas auf die Oberfläche drückt, kollabieren die Poren in dieser Region, das Material wird dort transparenter und das Lichtmuster ändert sich. Ein gerader Druck erzeugt einen fokussierteren Fleck, während ein gleitender oder schräger Druck diesen Fleck seitlich verschiebt. Durch das Anpassen dieser sich ändernden Muster an einfache Glockenkurven konnten die Forschenden die Form und Position der dunkleren Region in die Stärke der senkrechten Kraft sowie in Größe und Richtung seitlicher Kräfte übersetzen.
Robotertastsinn, der die Richtung kennt
An einem Roboterfinger montiert, konnte der dünne Sensor unterscheiden, ob er auf eine Kugel, die ebene Seite eines Würfels, eine Kante oder eine scharfe Ecke drückte, und verfolgte Bewegungen, wenn der Finger über Oberflächen glitt. Das Gerät erfasste Normalkräfte über einen weiten Bereich, mit feiner Empfindlichkeit für leichte Berührungen, und detektierte winzige seitliche Verschiebungen von nur Bruchteilen eines Mikrometers pro Krafteinheit. Es funktionierte auch noch, nachdem Teile des Films absichtlich punktiert worden waren, dank seiner randbasierten Messmethode. Ein auf den rekonstruierten Mustern trainiertes Computer‑Vision‑Modell erkannte verschiedene Kontaktzustände mit etwa 96,5 Prozent Genauigkeit, was zeigt, dass die reichhaltigen, bildähnlichen Daten von modernen KI‑Werkzeugen gut interpretiert werden können.
Was das für den Alltag bedeutet
Einfach ausgedrückt haben die Forschenden eine flexible, kameranähnliche Tatschicht entwickelt, die sich ohne das übliche Kabelgewirr über gekrümmte Flächen legen lässt. Da sie dünn, biegsam und relativ kostengünstig herstellbar ist, könnte sie schließlich große Flächen von Roboterhänden, Prothesen oder textilähnlichen Gesundheitsmonitoren bedecken. Über die Robotik hinaus kann dieselbe Technologie direkt auf der Haut abbilden, wie gut Sonnenschutzmittel UV‑Licht blockieren, den Oberflächendruck in medizinischen Geräten prüfen oder Alltagsgegenständen ein Tastbewusstsein verleihen. Zwar ist noch Arbeit nötig, um das System zu beschleunigen und viele Kontaktpunkte gleichzeitig zu erfassen, doch die Studie weist in Richtung einer Zukunft, in der Maschinen die Welt mit einer dem menschlichen Tastsinn deutlich näheren Feinheit „fühlen“ können.
Zitation: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
Schlüsselwörter: robotische Tastsensorik, flexible elektronische Haut, Impedanztomographie, 3‑achsige Kraftmessung, Quantenpunkt‑Imager