Clear Sky Science · ja
3軸ロボット触覚センシングのための超柔軟光電気インピーダンストモグラフィー型イメージャー
本当に「感じる」ロボット
触覚はロボットがまだ模倣に苦労している人間の感覚の一つです。本研究は、ロボットがどれだけ強く押しているかだけでなく、力がどの方向から来ているかも検出できる紙のように薄い電子“皮膚”を紹介します。柔らかく、曲げられ、損傷にもある程度耐えるため、この新しいセンサーは将来ロボットの手、医療機器、あるいはウェアラブル機器を覆い、より自然な触覚を与える可能性があります。
触覚を「見る」新しい方法
既存の多くのロボット用タッチセンサーは、キーボードのように配線が密に配置されています:各小さな感知点が個別の接続を必要とします。その設計は大面積化すると複雑で壊れやすく、高価になり、一本の断線が行や列全体を無効にすることがあります。本研究チームはまったく異なるアプローチを採りました。個別のピクセルの格子を使う代わりに、周囲に16個だけ金属接点を配置した丸い超薄膜を作りました。センサーを通して当たる光が膜内の電流の流れ方を変え、表面での測定から内部を推定する医療用スキャンと同様に、コンピュータが中央で起きていることのイメージを再構成します。この方法は光電気インピーダンストモグラフィーと呼ばれ、配線を大幅に減らして明暗の詳細なパターンを“見る”ことを可能にします。
ラップのように薄いフィルム
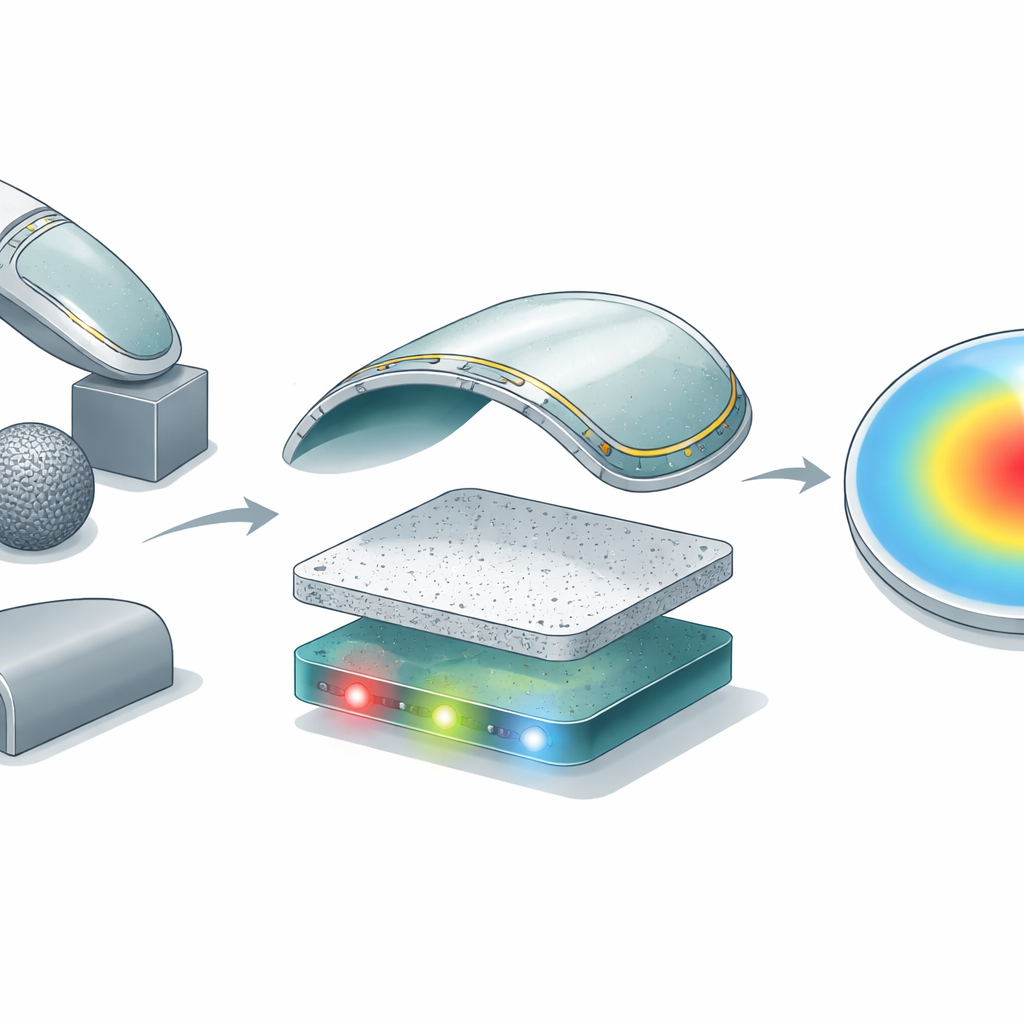
新しいイメージャーは厚さ約5マイクロメートルしかなく—人間の髪の毛より何倍も薄い—それでもいくつかの慎重に調整された層を組み合わせています。研究者たちは超柔軟なプラスチック基板を作り、光に感度のある金属酸化物膜を付け、その上に紫外線や可視光に強く反応する微小な半導体結晶である量子ドットをコーティングしました。外周には小さなアルミニウム電極を配置しています。膜の下から光が当たると、より多く光を受けた領域は陰った領域とは異なる電気伝導特性を示します。周辺の電極対間で電流を流し、得られる電圧を測定することで、システムは中央の光強度の二次元マップを再構成します。試験ではデバイスが光に対して高感度であり、数時間の使用でも安定し、ペンのような曲面に巻き付けたり針のように細い棒に曲げたりしても1.5ミリメートルほどの近接する特徴を区別できることが示されました。
光だけでなく圧力を透かして見る
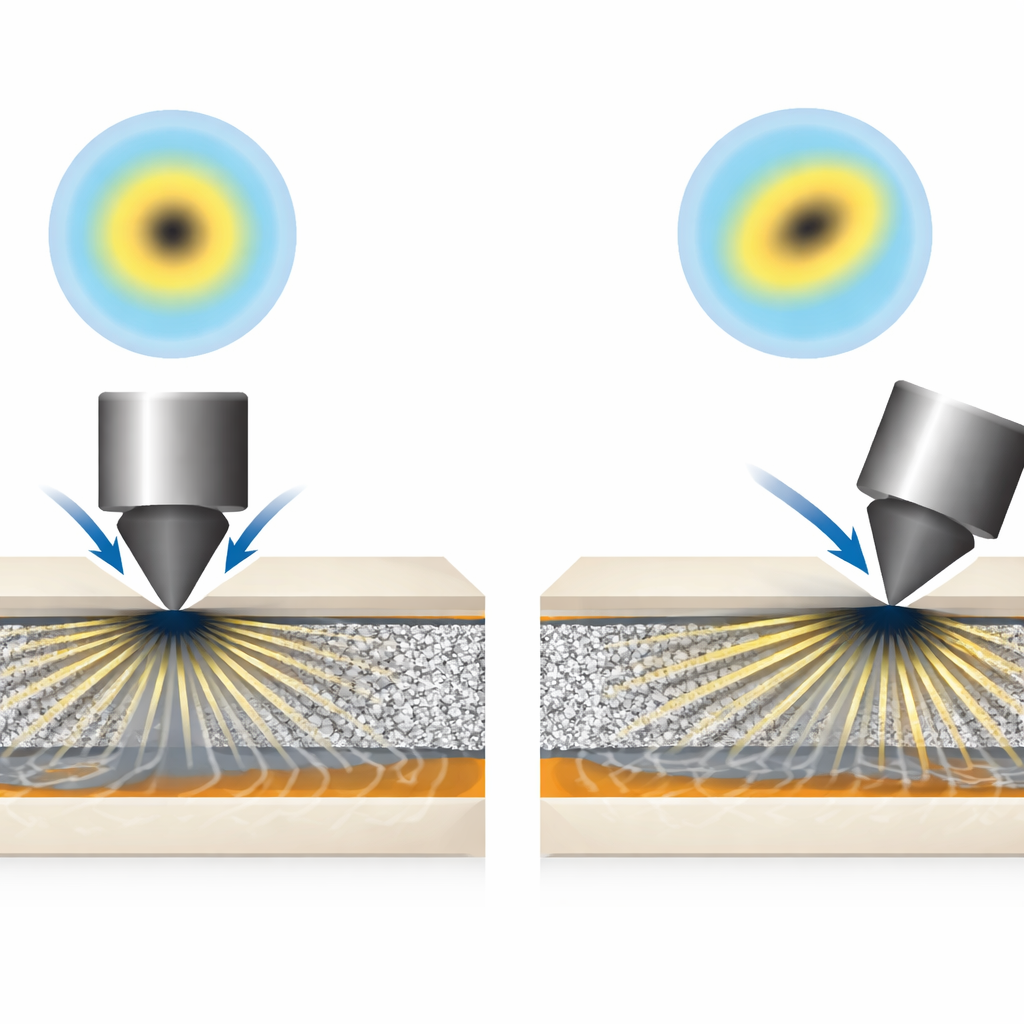
この光イメージャーを触覚センサーに変えるために、チームはさらに二つの層を加えました:下側に柔軟な紫外線発光ダイオードシート、そしてその間にスポンジ状で多孔質のシリコーンゴムです。無圧状態ではゴム内の小さな孔が光を散乱し、イメージャーには柔らかく比較的均一な光が届きます。何かが表面を押すと、その領域の孔が潰れて材料がより透明になり、光のパターンが変化します。真っ直ぐ押すとより焦点の合ったスポットができ、滑らせたり斜めに押すとそのスポットは横にずれます。これらの変化するパターンを単純なベル型曲線に当てはめることで、研究者たちは暗くなった領域の形と位置から垂直方向の力の強さや横方向の力の大きさと方向を変換できました。
方向を知るロボットの触覚
ロボットの指に取り付けると、この薄いセンサーは球体、立方体の平らな面、エッジ、鋭い角に押しているかどうかを識別でき、指が表面上を滑る動きも追跡しました。デバイスは幅広い範囲で垂直圧力を感知し、優しいタッチに対しても高い感度を示し、単位力あたり数分の一マイクロメートルという微小な横方向のずれも検出しました。また、エッジ基準の測定方法のおかげで、フィルムの一部が故意に突き刺されても動作しました。再構成されたパターンで訓練されたコンピュータビジョンモデルは約96.5パーセントの精度で異なる接触状況を認識し、画像のような豊富なデータが現代の人工知能ツールで容易に解釈できることを示しました。
日常生活にとっての意味
簡単に言えば、研究者たちはカメラのように働く柔軟な触覚層を作り、従来の配線のもつれなしに曲面に広げることができるようにしました。薄く、曲げやすく、比較的低コストで製造できるため、将来的にはロボットの手、人工肢、衣類のような健康モニターの大面積を覆うことが可能になるかもしれません。ロボティクスを越えて、同じ技術は日焼け止めが皮膚上でどれだけ紫外線を遮るかを直接マッピングしたり、医療機器の表面圧をチェックしたり、日常品に触覚認識を加えたりする用途にも応用できます。システムの高速化や同時に多数の接触点を感知するためのさらなる改良は必要ですが、本研究は機械が私たちの触覚にもっと近い精度で世界を“感じる”未来への道を示しています。
引用: Qiao, K., Feng, X., Dong, L. et al. Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing. Nat Commun 17, 3928 (2026). https://doi.org/10.1038/s41467-026-70599-6
キーワード: ロボット触覚センシング, 柔軟電子スキン, インピーダンストモグラフィー, 3軸力センシング, 量子ドットイメージャー